模糊神经网络控制器(MATLAB)
模糊神经网络控制器(Fuzzy Neural Network Controller)是将模糊控制和神经网络相结合的一类控制器。它综合了两者的优点,主要包括以下特点:
知识表达能力强。模糊系统的语言规则和神经网络的学习能力相结合,可以表示复杂的非线性映射关系。
自适应能力强。神经网络提供了在线学习和自适应的能力,可以根据过程的变化自动调整控制器的参数。
控制效果好。模糊推理结合神经网络近似能力,使控制效果优于传统PID控制器。
结构灵活。如T-S型、并行型等多种网络结构,可以根据实际需要选择。
模糊神经网络控制器的设计过程包括:确定输入输出变量、构建模糊控制规则、选择网络结构、确定学习算法以及仿真验证。应用领域十分广泛,如电机控制、机器人控制、化工过程控制等,特别适合对象复杂、模型难以建立的场合。
总体而言,模糊神经网络控制器集两种智能方法之长,是一种性能优异的现代控制策略。
MATLAB代码:
%% 模糊神经网络控制器主程序
% 清空MATLAB环境
clear all;%清除变量
close all;clc;%清空命令窗口
%% --(1)设置参数开始--
InputNumber = 2;%输入变量的数量
FuzzyPartitionNumber = 7;%模糊论域划分数量的设置
RuleNum = 49;%规则数量的设置
ProportionSum = 0;
[c1,b1,w1]=IniFuzzyNN(InputNumber,FuzzyPartitionNumber,RuleNum);%% 初始化模糊神经网络参数
x_input = [0;
0]; % 神经网络输入初始化
myts=80e-6;%采样间隔
mynum=[500 1];%控制对象传递函数分子
myden=[10,20,5000];%控制对象传递函数分母
mysys=tf(mynum ,myden);
dsys=c2d(mysys,myts,'z');%把传递函数转换为离散状态空间
[mynum myden] = tfdata(dsys,'v');
N=5000;%采样点数
%输入信号为单位阶跃
rin=zeros(N,1);
for gen=1:1:N
if gen>100
rin(gen)=1.0;
end
end
%模糊神经网络控制器的量化因子设置
Ke = 0.8;
Kec = 1e-4;
Ka = 3.5;%比例因子的设置
Kb = 6200;%积分因子的设置
%% 模糊神经网络控制器的控制量参数初始化
error_1 = rin(1);%误差初始化
%输出初始化
y_1=0;
y_2=0;
y_3=0;
%控制论初始化
u_1=0;
u_2=0;
u_3=0;
%% 模糊神经网络控制器的相关参数矩阵初始化
FuzzyBPnet=zeros(InputNumber,FuzzyPartitionNumber);
fuzzyData2=zeros(InputNumber,FuzzyPartitionNumber);
fuzzyData4=zeros(InputNumber,FuzzyPartitionNumber);
ecdata=zeros(N,1);
times=zeros(N,1);
yout=zeros(N,1);
errorData=zeros(N,1);
dError=zeros(N,1);
eData=zeros(N,1);
u=zeros(N,1);
for gen=1:1:N
times(gen)=gen*myts;
yout(gen)=-myden(2)*y_1-myden(3)*y_2+mynum(2)*u_1+mynum(3)*u_2;%二阶系统输出计算
errorData(gen)=rin(gen)-yout(gen);%计算系统误差
dError(gen) = (errorData(gen)-error_1)/myts;%系统误差变化
eData(gen) = Ke*errorData(gen);%输入变量模糊化:液位差
ecdata(gen) = Kec*dError(gen);%输入变量模糊化:液位差变化率
%% 模糊控制输入变量范围限制
% 液位差
limite = 2;
if eData(gen)>limite
eData(gen)=limite;
elseif eData(gen)<-limite
eData(gen)=-limite;
end
% 液位差变化率
limitec = 2;
if ecdata(gen)>limitec
ecdata(gen)=limitec;
elseif ecdata(gen)<-limitec
ecdata(gen)=-limitec;
end
%% 第1层输入层:模糊神经网络节点输入:液位差e,液位差变化率ec
x_input(1) = eData(gen);
x_input(2) = ecdata(gen);
fuzzydata1 = x_input;
%% 开始第2层模糊化层:进行模糊划分
for i=1:1:InputNumber
for j = 1:1:FuzzyPartitionNumber
FuzzyBPnet(i,j) = -(fuzzydata1(i)-c1(i,j))^2/(2*b1(i,j)^2);
fuzzyData2(i,j) = exp(FuzzyBPnet(i,j));
end
end
for j = 1:1:FuzzyPartitionNumber% 提取模糊化层各节点的输出
m1(j) = fuzzyData2(1,j);
m2(j) = fuzzyData2(2,j);
end
%% 第3层推理层:模糊推理过程
for i = 1:1:FuzzyPartitionNumber
for j = 1:1:FuzzyPartitionNumber
fuzzyData4(i,j) = m1(i)*m2(j);
end
end
fuzzyData3 = [fuzzyData4(1,:),fuzzyData4(2,:),fuzzyData4(3,:),fuzzyData4(4,:),fuzzyData4(5,:),fuzzyData4(6,:),fuzzyData4(7,:)]; %对规则层各节点输出
%% 第4层是归一化层:对变量进行归一化计算
fall_sum = 0;
for i = 1:1:RuleNum
fall_sum = fall_sum+fuzzyData3(i);
end
% 归一化层节点输出
f4 = fuzzyData3/fall_sum;
NormalizationOutput(gen) = w1'*fuzzyData3';
%% 第5层输出层:对模糊控制输出进行清晰化
ProportionSum = ProportionSum+NormalizationOutput(gen)*myts;
u(gen) = Ka*NormalizationOutput (gen)+ Kb*ProportionSum ;
%控制器的输出范围限制
limitu=15.5;
if u(gen)>limitu
u(gen)=limitu;
elseif u(gen)<-limitu
u(gen)=-limitu;
end
%% 更新 输出量和控制量,注意是二阶系统
u_3=u_2;
u_2=u_1;
u_1=u(gen);
y_3=y_2;
y_2=y_1;
y_1=yout(gen);
error_2 = error_1;
error_1=errorData(gen);
end
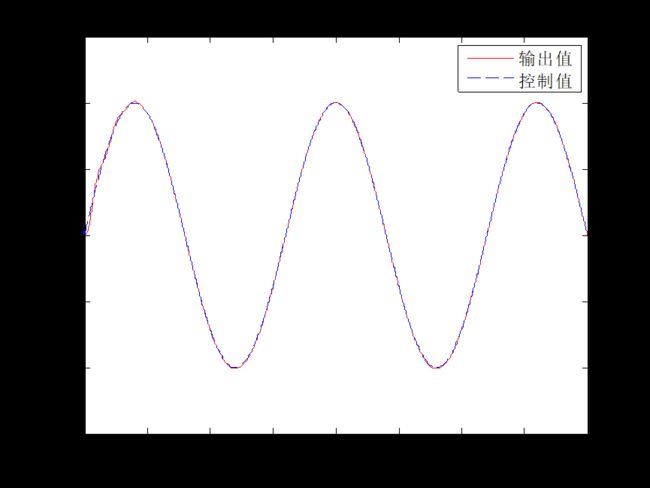
%% 绘制仿真图
figure
plot(times,yout,'r');
hold on;
plot(times,rin,'b');
legend('输出值','控制值');
xlabel('时间');
ylabel('响应');
title('模糊神经网络控制器对双容水箱的的阶跃相应曲线');
figure
plot(times,eData,'blue',times,ecdata,'r');
legend('e','ec');
legend('液位差','液位差变化率');
xlabel('时间');
ylabel('响应');
title('模糊神经网络控制器对双容水箱的的阶跃相应曲线');
程序结果: