《深度学习入门》学习笔记
原书:《深度学习入门:基于Python的理论与实现》
文章目录
- 前言
- 第一章 python入门
-
-
- 列表
- 字典
- 类
- numpy
- 广播
-
- 第二章 感知机
- 第三章 神经网络
-
-
- 激活函数
-
- 第四章 神经网络的学习
-
-
- 损失函数
- 求梯度
-
- 第五章 误差反向传播法
- 第六章 与学习相关的技巧
-
-
- 6.1 寻找最优参数
- 6.3 权重的初始值
- 6.4 正则化
- 6.4 超参数的验证
-
- 第七章 卷积神经网络
-
-
- 卷积
- 池化
- CNN的可视化
- 代表性的CNN
-
- 第八章 深度学习
-
-
- 提高识别精度
- VGG
- GoogLeNet
- ResNet
- 深度学习的高速化
-
前言
玩了一学期网络,发现自己只是个调包侠…老老实实学基础理论吧…
第一章 python入门
1.3
列表
a = [1, 2, 3, 4, 5] # 生成列表
a[0:2] # 获取索引为0到2(不包括2!)的元素
a[1:] # 获取从索引为1的元素到最后一个元素
a[:3] # 获取从第一个元素到索引为3(不包括3!)的元素
a[:-1] # 获取从第一个元素到最后一个元素的前一个元素之间的元素
a[:-2] # 获取从第一个元素到最后一个元素的前二个元素之间的元素
字典
me = {‘height’:180} # 生成字典
me[‘height’] # 访问元素
me[‘weight’] = 70 # 添加新元素
类
class Man:
def __init (self, name): # init左右两条下划 线
self.name = name
print(“Initialized!”)
def hello(self):
print("Hello " + self.name + “!”)
def goodbye(self):
print("Good-bye " + self.name + “!”)
m = Man(“David”)
m.hello()
m.goodbye()
构造函数(constructor)是进行初始化的方法,只在生成类的实例时被调用一次。
1.5
numpy
常用
A.dtype # 查看数据类型
X.flatten() # 将X转换为一维数组
X[np.array([0, 2, 4])] # 获取索引为0、2、4的元素
np.dot(A, B) #矩阵相乘
np.argmax(y) # 数组中最大值的索引
X > 15
array([ True, True, False, True, False, False], dtype=bool)
X[X>15]
array([51, 55, 19])
广播


第二章 感知机
公式
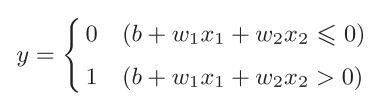
2层感知机可以实现任意函数
第三章 神经网络
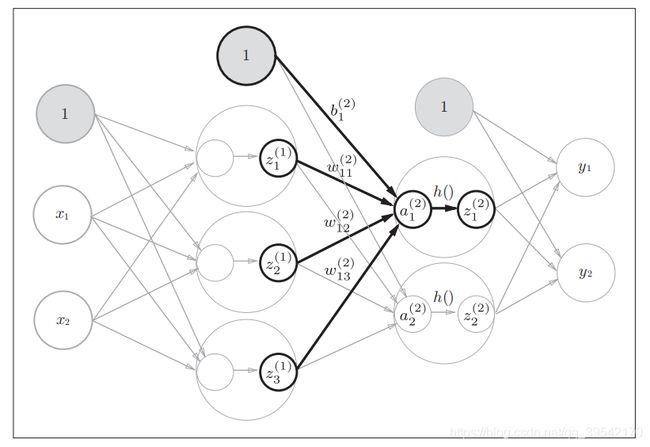
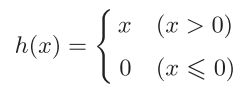
激活函数
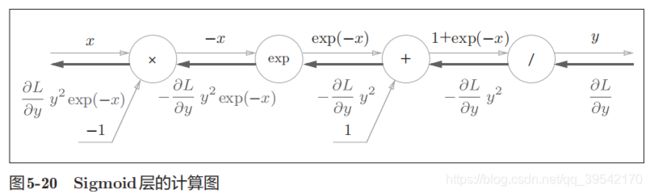
sigmoid函数

ReLU函数
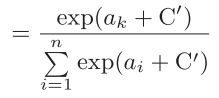
softmax函数(分类问题)

可能会溢出,超大值无法表示,改进:
第四章 神经网络的学习
损失函数
均方误差

yk是表示神经网络的输出,tk表示监督数据,k表示数据的维数
交叉熵误差

由正确解标签所对应的输出结果决定
mini_batch学习时,求所有单个数据损失函数的总和,再取平均
求梯度
数值微分
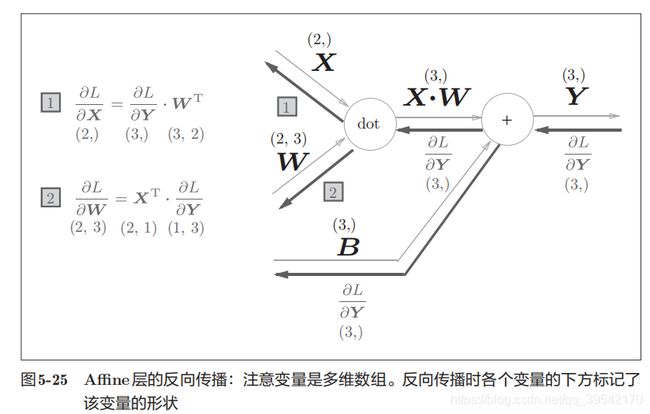
误差反向传播法
第五章 误差反向传播法
计算图
可通过正向传播和反向传播高效计算各个变量的导数值


第六章 与学习相关的技巧
6.1 寻找最优参数
一般用SGD、Adam
SGD 随机梯度下降法(stochastic gradient descent)
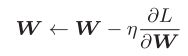
沿梯度方向更新参数,η表示学习率,实际上会取0.01或0.001这些事先决定好的值
Momentum
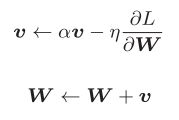
物体受梯度方向上的力和阻力,在这个力的作用下,物体的速度改变
α设定为0.9之类的值,对应物理上的地面摩擦或空气阻力。
AdaGrad
Ada来自英文单词Adaptive,即“适当的”的意思,会为参数的每个元素适当地调整学习率
η表示学习率。
变量h保存了以前的所有梯度值的平方和
更新参数时可以调整学习的尺度。可以按参数的元素进行学习率衰减,使变动大的参数的学习率逐渐减小。
Adam
融合了Momentum和AdaGrad的方法
6.3 权重的初始值
Xavier、He(relu专用初始值)等初始值比较有效
不可以全部设0;在误差反向传播中,权重值会进行相同的更新,拥有对称的值,多个神经元失去了存在的意义
必须随机生成初始值,各层间传递的数据要有广度,激活函数的表现力不受限制
代码如下(示例):
6.4 正则化
过拟合的原因:
模型拥有大量参数,表现力强
训练数据少
抑制过拟合的方法
权值衰减
很多过拟合原本就是因为权重参数取值过大才发生的
以L2范数为例,它的权值衰减是1/2 λW2, 然后加到损失函数上。λ是控制正则化强度的超参数。λ设置得越大,对大的权重施加的惩罚就越重。
Dropout
学习的过程中随机删除神经元
6.4 超参数的验证
超参的范围要“大致”的指定,同时减少学习的epoch
以下为例:
以权值衰减系数为10−8到10−4、学习率为10−6到10−2的范围进行实验, 从这个结果可以看出,学习率在0.001到0.01、权值衰减系数在10−8到10−6之间时,学习可以顺利进行

第七章 卷积神经网络
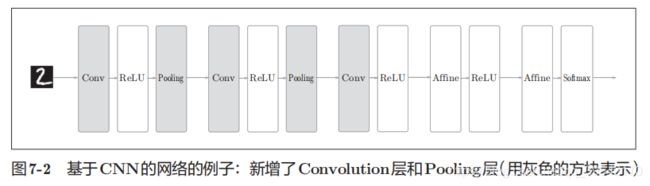
术语:卷积(conv)、特征图(feature map)、填充(padding)、步幅(stride)
卷积
1、计算卷积输出大小
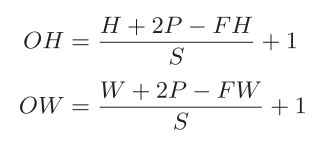
输出大小为(OH, OW),输入大小为(H, W),滤波器大小为(FH, FW),填充为P,步幅为S。
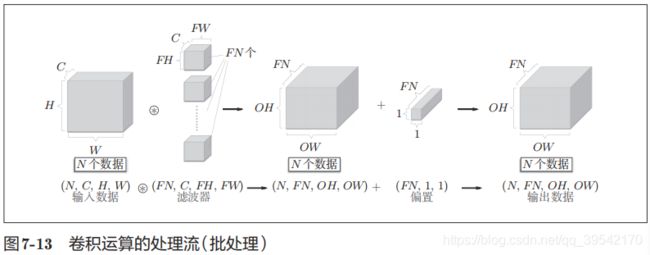
2、三维数据的卷积
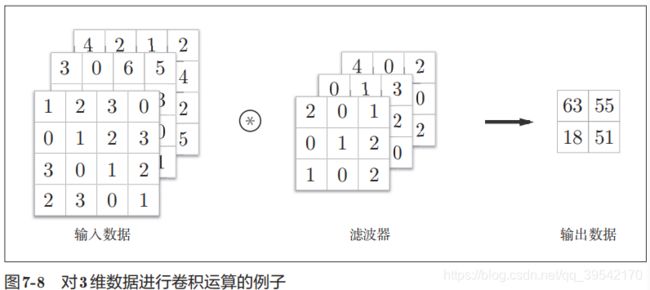


批处理
4维数据(batch_num, channel, height, width)
池化
图像识别领域,主要使用Max池化

CNN的可视化

右边的有规律的滤波器在观察边缘(颜色变化的分界线)和斑块(局部的块状区域)等

基于分层结构的信息提取
随着层次加深,神经元从简单的形状向“高级”信息变化
代表性的CNN
LeNet
AlexNet
第八章 深度学习
提高识别精度
集成学习
学习率衰减
Data Augmentation(数据扩充)
加深层(①减少网络参数数量 ②学习更加高效,各层要学习的问题分解成容易解决的简单问题 ) 从理论上无法解释怎样加深层
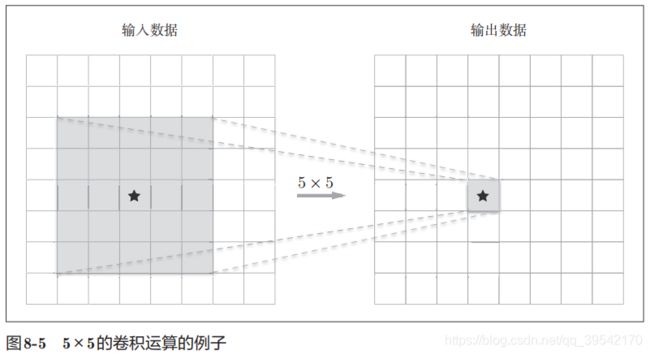
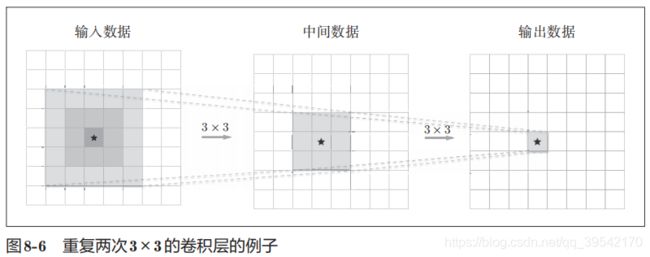
前者的参数数量25(5 × 5),后者一共是18(2 × 3 × 3)
叠加小型滤波器来加深网络还可以扩大感受野(receptive field,给神经元施加变化的某个局部空间区域)。
并且通过叠加层,将 ReLU等激活函数夹在卷积层的中间,进一步提高了网络的表现力。这是因为向网络添加了基于激活函数的“非线性”表现力,通过非线性函数的叠加,可以表现更加复杂的东西。
VGG
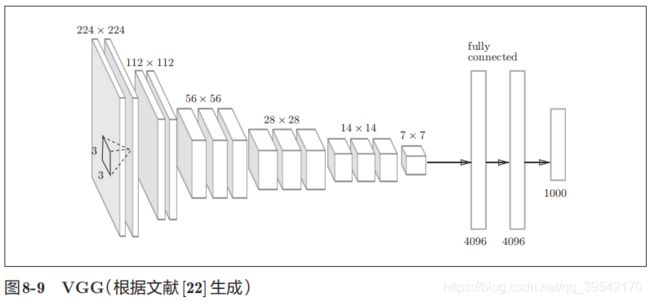
VGG是由卷积层和池化层构成的基础的CNN。
重复进行“卷积层重叠2次到4次,再通过池化层将大小减半”的处理,最后经由全连接层输出结果
GoogLeNet

GoogLeNet的特征是,网络不仅在纵向上有深度,在横向上也有深度(广度)。

Inception结构使用了多个大小不同的滤波器(和池化),最后再合并它们的结果。
此外,很多地方都使用了大小为1 × 1的滤波器的卷积层。这个1 × 1的卷积运算通过在通道方向上减小大小,有助于减少参数和实现高速化处理(???)
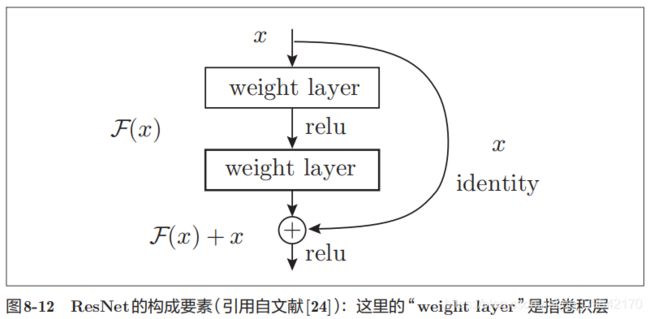
ResNet
它的特征在于具有比以前的网络更深的结构

通过快捷结构,原来的2层卷积层的输出F(x)变成了F(x) + x。反向传播时信号可以无衰减地传递,为加深层而导致的梯度变小的梯度消失问题就有望得到缓解。
深度学习的高速化
卷积层的处理时间加起来占GPU整体的95%,占CPU整体的89%!因此,如何高速、高效地进行卷积层中的乘积累加运算是深度学习的一大课题
① 基于GPU的高速化:
大型矩阵的乘积运算 ,这种大量的并行运算正是GPU所擅长的,CPU比较擅长连续的、复杂的计算)
提供GPU的公司主要有NVIDIA (英伟达)和 AMD。NVIDIA 提供了CUDA(面向GPU计算的综合开发环境),服务大多数深度学习框架
② 分布式学习
在多个GPU或者多台机器上进行分布式计算,
包含了机器间的通信、数据的同步等多个无法轻易解决的问题
支持分布式学习的框架有: Google的TensorFlow、微软的CNTK;
③ 运算精度的位数缩减
除了计算量之外,内存容量、总线带宽等也有可能成为瓶颈。所以要尽可能减少流经网络的数据的位数。
计算机中为了表示实数,主要使用64位或者32位的浮点数; 深度学习中使用16位的半精度浮点数(half float)
位数缩减是今后必须关注的一个课题,特别是在面向嵌入式应用程序中使用深度学习时