C++ 多线程学习(3) ---- 条件变量
1. 条件变量简介
在 C++ 11中,我们可以使用条件变量(condition variable)实现多个线程之间的同步操作,当条件不满足时,相关线程一直被阻塞,直到某种条件成立,这些线程才会被唤醒。
条件变量是利用线程间共享的全局变量进行同步的一种机制,主要包含两个动作:
- 一个线程因为等待条件变量的条件成立而挂起,
- 另外一个线程使条件成立,给出信号,从而唤醒被等待的线程。
为了防止竞争,条件变量总是和一个互斥锁结合在一起,通常情况下这个锁是 std::mutex,并且管理这个锁的只能是 std::unique_lock
原子操作的概念:
所谓原子操作是指不会被线程调度机制打断的操作;这种操作一旦开始,就一直运行到结束,中间不会有任何 context switch (切换到另一个线程)。
临界资源:
临界资源是一次执行过程仅仅允许一个进程使用的共享资源,各个进程采取互斥的方式实现共享,属于临界资源的硬件有 打印机,磁带机等,软件有消息队列,变量,数组,缓冲区等,各个进程采取互斥的方式实现对这种资源的共享。(可以理解为对资源的一次操作不能被打断,也就是一次操作过程需要完整,不能操作出现中间切走的情况)
临界区:
每个进程访问临界资源的那段代码称为临界区(criticalsection),每次只允许一个进程进去临界区,进去后,不允许其他进程进入。不论是硬件临界资源还是软件临界资源,多个进程必须互斥的对它进行访问,使用临界区时,一般不允许其运行时间过长,只要运行在临界区的线程还没有离开,其他所有进入此临界区的线程都会被挂起而进入等待状态,并在一定程度上影响程序的运行性能。
2. 条件变量的使用接口
上面提到的两个步骤,分别用下面的方法实现:
等待条件成立使用的是 condition_variable 类成员函数 wait,wait_for 和 wait_unitl,
给出信号的使用的是 condition_variable 类成员函数 notify_one 和 notify_all 函数

2.1 wait/wait_for 函数
wait 导致当前线程阻塞直至条件变量被通知,或虚假唤醒发生,可选地循环直至满足某谓词。
wait_for 函数导致当前的线程阻塞直到条件变量被通知,或者虚假唤醒发生,或者超时返回。
返回值说明:
1. 如果经过 rel_time 指定的关联时限则为 std:cv_status:timeout,否则为 std:cv_status:no_timeout
以上两个类型的 wait 函数都会在阻塞的时候,自动释放锁的权限,即调用 unique_lock 的成员函数 unlock(),以便于其他线程能够有机会获得锁,这就是条件变量只能和 unique_lock 一起使用的原因,否则线程一直占有锁,线程被阻塞。
2.2 notify/notify_one
notify/notify_one 函数声明如下:
notify_one:任何线程在 *this 上等待,则调用 notify_one 会解阻塞(唤醒)等待的线程之一
notify:唤醒任何在 *this 上等待的线程

在正常的情况下,wait 类型函数返回时要不是因为被唤醒,要不是因为超时才返回,但是在实际中发现,因为操作系统的原因,wait 类型在不满足条件时,它也会返回,这就导致了虚假唤醒,因此我们一般都是使用带有谓词参数的 wait 函数。
condition_variable 的一般用法如下:
- 如果两个线程共享的变量存在其中一个线程读取,另一个线程写入的情况,或者存在两个线程都要写的情况,那么它们共享的变量需要在互斥锁的保护之下。
- notify 函数本身也需要在互斥锁的保护之下
- wait 函数本身就带有一个互斥锁的参数
condition_variable threadqueueDemo::cv;
mutex threadqueueDemo::mDisplayMutex;
queue threadqueueDemo::mDisplayQueue;
void threadqueueDemo::threadLoop() {
while (true) {
{
unique_lock lock(mDisplayMutex);
if (mDisplayQueue.empty()) {
cout << "thread tid = " << this_thread::get_id() << endl;
cv.wait(lock);
} else {
auto p = mDisplayQueue.front();
mDisplayQueue.pop();
cout << "get data p =" << p << endl;
}
}
}
}
threadqueueDemo::threadqueueDemo() {
t = new thread(threadLoop);
t->detach();
for (int i = 0; i < 20; i++) {
pushdata();
this_thread::sleep_for(chrono::milliseconds(500ms));
}
}
void threadqueueDemo::pushdata() {
unique_lock lock(mDisplayMutex);
{
++mData;
mDisplayQueue.push(mData);
cv.notify_all();
}
}
void threadqueueDemo::testthreadqueue(int argc, char* argv[]) {
threadqueueDemo* t = new threadqueueDemo;
} 3. 生产者消费问题
在这里,我们使用条件变量,解决生产者-消费者问题,该问题的主要描述如下:
生产者-消费这个问题,也称为有限缓冲问题,是一个进程/线程同步问题的经典案例。该问题描述了共享固定大小缓冲区的两个进程/线程—— 就是所谓的生产者和消费者,在实际运行时会发生的问题。
生产者的主要作用是生成一定量的数据放到缓冲区,然后重复此过程。与此同时,消费者也在缓冲区中消耗这些数据。该问题的关键就是要保证生产者不会再缓冲区满时加入数据,消费者也不会在缓冲区空时消耗数据。
要解决该问题,就必须让生产者在缓冲区满时休眠,等到下次消费者消耗缓冲区中的数据的时候,生产者才能被唤醒,开始往缓冲区添加数据。
同样,也可以让消费者在缓冲区空时进入休眠,等到生产者往缓冲区添加数据知乎,再唤醒消费者。
示例代码如下:
std::mutex g_cvMutex;
std::condition_variable g_cv;
std::deque g_data_deque;
const int MAX_NUM = 30;
int g_next_index = 0;
const int PRODUCER_THREAD_NUM = 3;
const int CONSUMER_THREAD_NUM = 3;
void producer_thread(int thread_id)
{
while (true) {
std::this_thread::sleep_for(std::chrono::milliseconds(500));
std::unique_lock lk(g_cvMutex);
if (g_data_deque.size() <= MAX_NUM) {
g_next_index++;
g_data_deque.push_back(g_next_index);
std::cout << "producer_thread: " << thread_id << " producer data: " << g_next_index;
std::cout << " queue size: " << g_data_deque.size() << std::endl;
} else {
g_cv.notify_all();
}
}
}
void consumer_thread(int thread_id) {
while (true) {
std::this_thread::sleep_for(std::chrono::milliseconds(500));
std::unique_lock lk(g_cvMutex);
if (!g_data_deque.empty()) {
int data = g_data_deque.front();
g_data_deque.pop_front();
std::cout << "\tconsumer_thread: " << thread_id << " consumer data: ";
std::cout << data << " deque size: " << g_data_deque.size() << std::endl;
} else {
g_cv.wait(lk);
}
}
}
producerconsumer::producerconsumer() {
std::thread *producerthread[PRODUCER_THREAD_NUM];
std::thread *consumerthread[CONSUMER_THREAD_NUM];
for (int i = 0; i < PRODUCER_THREAD_NUM; i++) {
producerthread[i] = new thread(producer_thread, ref(i));
}
for (int j = 0; j < CONSUMER_THREAD_NUM; j++) {
consumerthread[j] = new thread(consumer_thread, ref(j));
}
for (int i = 0; i < PRODUCER_THREAD_NUM; i++) {
producerthread[i]->join();
}
for (int j = 0; j < CONSUMER_THREAD_NUM; j++) {
consumerthread[j]->join();
}
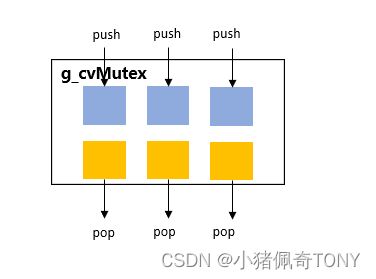
} - 程序中创建三个生产者线程,每个线程都会向 g_data_deque 这个双端队列中 push 数据
- 三个生产者线程push 的 int 类型使用的是全局变量,是在已有的基础上累加的 int 类型变量
- 程序中创建了三个消费者线程,只要双端队列不为空,就会将数据从双端队列中 pop 出来
- 生产者消费者会有抢占的操作,就是消费者并没有完全将队列消费完,让队列为空的时候,生产者再次将生产的内容放入队列,相当于有6个线程,在g_cvMutex 的保护下,生产和消费队列里面的内容
执行结果如下:

4. 为什么条件变量要和互斥锁一起使用
首先要说明为什么要引入条件变量,如果某个线程需要等待某个条件成立,而这个条件又是其他线程给出的,其中的一种解决方案是:
threadA() {
lock
if(条件满足)
unlock
excute code;
} else {
sleep(n);
}
}
- 如果一直判断条件是否满足,线程没有阻塞等待,是非常浪费CPU资源的,所以引入了 sleep 函数,相当于 sleep 一段时间后再做判断
- 注意此时的判断条件是临界资源,需要锁的保护
引入条件变量后,若条件不满足,则相应线程被阻塞直至条件发生变化被唤醒,再去查询条件是否满足,避免了上述条件变化发生之前的无用查询包括加解锁
条件变量的引入,使多个线程以一种无竞争的方式等待条件的改变。
在使用 condition_variable 的 wait 函数之前,通常要进行条件判断,而此条件属于临界资源(在读取此条件的时候不能被打断,比如去更新这个条件),需要在访问之前加锁,这是为了保护临界资源的需要。
unique_lock lock(mDisplayMutex);
if (mDisplayQueue.empty()) {
cv.wait(lock);
} 比如上面的代码中如果不加锁保护,在判断 mDisplayQueue.empty() 的条件成立后,此时线程被挂起,调度了另一个线程,另外的线程用于唤醒这个 condition_variable,此时当前线程因为还没有处于 wait 状态上(没有处于调度器的等待队列上),所以会丢失掉这个唤醒操作,如果这个唤醒操作只有一次,那么当前线程很可能永远处于阻塞等待的状态上。
所以 condtion_variable 加互斥锁的作用,就是保证全局条件和wait 的操作是原子操作
C++面试问题:为什么条件变量要和互斥锁一起使用?_条件变量为什么要和锁一起用_August8757的博客-CSDN博客