[数字信号处理] FIR滤波器基础
对于一个滤波器而言,其单位冲击响应是有限区间的数列的话,这个滤波器是FIR滤波器。反之,其单位冲击响应是无限区间的数列的话,这个滤波器是IIR滤波器。
下面使用线性差分方程式,在时域内,解释一下FIR与IIR数字滤波器。使用单位脉冲响应和其输入信号进行卷积运算,可得到下式
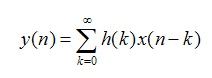
将其改写为递归的方式,则
![[数字信号处理] FIR滤波器基础](http://img.e-com-net.com/image/product/94376af2e2a3432aa8976dd3bf301f9d.jpg)
上式是1次差分方程式,而对于N次数字滤波器的输入输出关系,表示为N次差分方程式,如下所示。
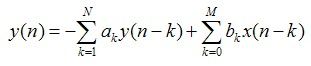
由上式看,输出 y(n) 需要自己的历史值,也就是,含有反馈。
的时候,反馈有作用,其系统框图如下。
![[数字信号处理] FIR滤波器基础](http://img.e-com-net.com/image/product/f13441b950754cbab413ca5fdf851b69.jpg)
此时,输入单位脉冲,由于反馈的作用,系统的单位冲击响应是无限的。
的时候,无反馈作用,其单位冲击响应是有限的,其单位框图如下。
![[数字信号处理] FIR滤波器基础](http://img.e-com-net.com/image/product/6ba9dd34b62b409b933e61037276c10c.jpg)
输入单位脉冲,由于没有反馈的作用,系统的单位冲击响应是有限的。也就是Finite Impulse Response,字面意思。
接下来,用C实现一个FIR滤波器,这里,系数是随意设置的。
#include <stdio.h>
#include <math.h>
#include <malloc.h>
#include <string.h>
double Real_Time_FIR_Filter(double *b,
int b_Lenth,
double *Input_Data)
{
int Count;
double Output_Data = 0;
Input_Data += b_Lenth - 1;
for(Count = 0; Count < b_Lenth ;Count++)
{
Output_Data += (*(b + Count)) *
(*(Input_Data - Count));
}
return (double)Output_Data;
}
void Save_Input_Date (double Scand,
int Depth,
double *Input_Data)
{
int Count;
for(Count = 0 ; Count < Depth-1 ; Count++)
{
*(Input_Data + Count) = *(Input_Data + Count + 1);
}
*(Input_Data + Depth-1) = Scand;
}
int main(void)
{
double b[] = {0.5 , -0.5 , 1};
double Scand_Data = 0;
char Command = 0;
int b_Lenth = (sizeof(b)/sizeof(double));
int Count = 0;
double Input_Data[sizeof(b)/sizeof(double)] = {0};
double Output_Data = 0;
/*--------------------display----------------------------*/
printf(" b(k) : ");
for(Count = 0; Count < b_Lenth ;Count++)
{
printf("%f " , b[Count]);
}
printf("\n");
/*-----------------------------------------------------*/
Count = 0;
while(1)
{
if(Count == 0) printf("The Input : ");
else printf("The Next Input : ");
scanf("%lf",&Scand_Data);
printf("Input x(%d) : %lf ",Count,Scand_Data);
Save_Input_Date (Scand_Data,
b_Lenth,
Input_Data);
Output_Data = Real_Time_FIR_Filter(b,
b_Lenth,
Input_Data);
printf("Output y(%d) : %lf \n",Count,Output_Data);
scanf("%c",&Command);
if(Command == 27) break; //ESC
Count++;
}
printf("\n");
return (int)0;
}
到此,一个FIR滤波器就实现了,只需要不停的输入输入信号就好了,ESC键可以停止程序。
其单位冲击响应用Matlab表示如下。
![[数字信号处理] FIR滤波器基础](http://img.e-com-net.com/image/product/9fdf4e82e90442f58ccd9b35a5790c37.jpg)