随机抽样一致性算法(RANSAC)资料合集
本文翻译自维基百科,译者:http://www.cnblogs.com/xrwang/archive/2011/03/09/ransac-1.html,本人在此基础上进行了一些添加和修改。
英文原文地址是:http://en.wikipedia.org/wiki/ransac,如果您英语不错,建议您直接查看原文。
RANSAC是“RANdom SAmple Consensus(随机抽样一致)”的缩写。它可以从一组包含“局外点”的观测数据集中,通过迭代方式估计数学模型的参数。它是一种不确定的算法——它有一定的概率得出一个合理的结果;为了提高概率必须提高迭代次数。该算法最早由Fischler和Bolles于1981年提出。
RANSAC的基本假设是:
(1)数据由“局内点”组成,例如:数据的分布可以用一些模型参数来解释;
(2)“局外点”是不能适应该模型的数据;
(3)除此之外的数据属于噪声。
局外点产生的原因有:噪声的极值;错误的测量方法;对数据的错误假设。
RANSAC也做了以下假设:给定一组(通常很小的)局内点,存在一个可以估计模型参数的过程;而该模型能够解释或者适用于局内点。
一、示例
一个简单的例子是从一组观测数据中找出合适的2维直线。假设观测数据中包含局内点和局外点,其中局内点近似的被直线所通过,而局外点远离于直线。简单的最小二乘法不能找到适应于局内点的直线,原因是最小二乘法尽量去适应包括局外点在内的所有点。相反,RANSAC能得出一个仅仅用局内点计算出模型,并且概率还足够高。但是,RANSAC并不能保证结果一定正确,为了保证算法有足够高的合理概率,我们必须小心的选择算法的参数。
左图:包含很多局外点的数据集 右图:RANSAC找到的直线(局外点并不影响结果)
二、概述
RANSAC算法的输入是一组观测数据,一个可以解释或者适应于观测数据的参数化模型,一些可信的参数。
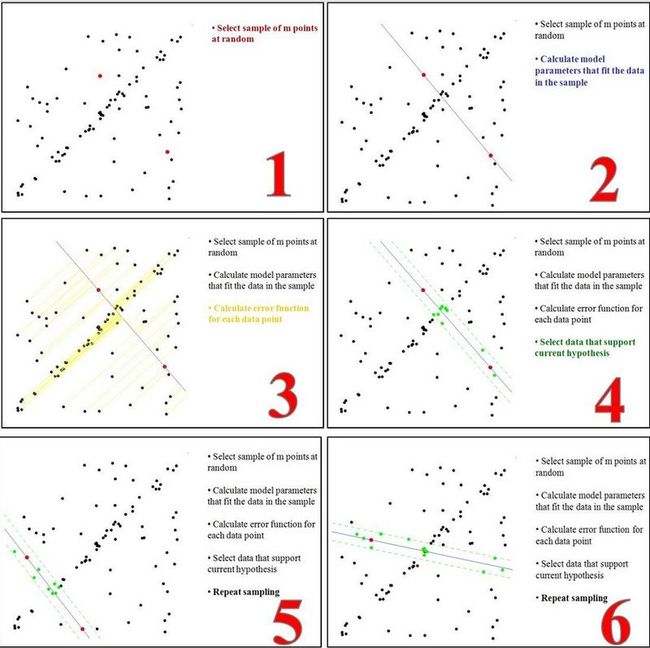
RANSAC通过反复选择数据中的一组随机子集来达成目标。被选取的子集被假设为局内点,并用下述方法进行验证:
1.有一个模型适应于假设的局内点,即所有的未知参数都能从假设的局内点计算得出。
2.用1中得到的模型去测试所有的其它数据,如果某个点适用于估计的模型,认为它也是局内点。
3.如果有足够多的点被归类为假设的局内点,那么估计的模型就足够合理。
4.然后,用所有假设的局内点去重新估计模型,因为它仅仅被初始的假设局内点估计过。
5.最后,通过估计局内点与模型的错误率来评估模型。
这个过程被重复执行固定的次数,每次产生的模型要么因为局内点太少而被舍弃,要么因为比现有的模型更好而被选用。
整个过程可参考下图:
三、算法
伪码形式的算法如下所示:
输入:
data —— 一组观测数据
model —— 适应于数据的模型
n —— 适用于模型的最少数据个数
k —— 算法的迭代次数
t —— 用于决定数据是否适应于模型的阀值
d —— 判定模型是否适用于数据集的数据数目
输出:
best_model —— 跟数据最匹配的模型参数(如果没有找到好的模型,返回null)
best_consensus_set —— 估计出模型的数据点
best_error —— 跟数据相关的估计出的模型错误
iterations = 0
best_model = null
best_consensus_set = null
best_error = 无穷大
while ( iterations < k )
maybe_inliers = 从数据集中随机选择n个点
maybe_model = 适合于maybe_inliers的模型参数
consensus_set = maybe_inliers
for ( 每个数据集中不属于maybe_inliers的点 )
if ( 如果点适合于maybe_model,且错误小于t )
将点添加到consensus_set
if ( consensus_set中的元素数目大于d )
已经找到了好的模型,现在测试该模型到底有多好
better_model = 适合于consensus_set中所有点的模型参数
this_error = better_model究竟如何适合这些点的度量
if ( this_error < best_error )
我们发现了比以前好的模型,保存该模型直到更好的模型出现
best_model = better_model
best_consensus_set = consensus_set
best_error = this_error
增加迭代次数
返回 best_model, best_consensus_set, best_error
RANSAC算法的可能变化包括以下几种:
(1)如果发现了一种足够好的模型(该模型有足够小的错误率),则跳出主循环。这样可能会节约计算额外参数的时间。
(2)直接从maybe_model计算this_error,而不从consensus_set重新估计模型。这样可能会节约比较两种模型错误的时间,但可能会对噪声更敏感。
四、参数
我们不得不根据特定的问题和数据集通过实验来确定参数t和d。然而参数k(迭代次数)可以从理论结果推断。当我们从估计模型参数时,用p表示一些迭代过程中从数据集内随机选取出的点均为局内点的概率;此时,结果模型很可能有用,因此p也表征了算法产生有用结果的概率。用w表示每次从数据集中选取一个局内点的概率,如下式所示:
w = 局内点的数目 / 数据集的数目
通常情况下,我们事先并不知道w的值,但是可以给出一些鲁棒的值。假设估计模型需要选定n个点,wn是所有n个点均为局内点的概率;1 − wn是n个点中至少有一个点为局外点的概率,此时表明我们从数据集中估计出了一个不好的模型。 (1 − wn)k表示算法永远都不会选择到n个点均为局内点的概率,它和1-p相同。因此,
1 − p = (1 − wn)k
我们对上式的两边取对数,得出
![]()
值得注意的是,这个结果假设n个点都是独立选择的;也就是说,某个点被选定之后,它可能会被后续的迭代过程重复选定到。这种方法通常都不合理,由此推导出的k值被看作是选取不重复点的上限。例如,要从上图中的数据集寻找适合的直线,RANSAC算法通常在每次迭代时选取2个点,计算通过这两点的直线maybe_model,要求这两点必须唯一。
为了得到更可信的参数,标准偏差或它的乘积可以被加到k上。k的标准偏差定义为:
![]()
五、优点与缺点
RANSAC的优点是它能鲁棒的估计模型参数。例如,它能从包含大量局外点的数据集中估计出高精度的参数。RANSAC的缺点是它计算参数的迭代次数没有上限;如果设置迭代次数的上限,得到的结果可能不是最优的结果,甚至可能得到错误的结果。RANSAC只有一定的概率得到可信的模型,概率与迭代次数成正比。RANSAC的另一个缺点是它要求设置跟问题相关的阀值。
RANSAC只能从特定的数据集中估计出一个模型,如果存在两个(或多个)模型,RANSAC不能找到别的模型。
六、应用
RANSAC算法经常用于计算机视觉,例如同时求解相关问题与估计立体摄像机的基础矩阵。
七、参考文献
Martin A. Fischler and Robert C. Bolles (June 1981). "Random Sample Consensus: A Paradigm for Model Fitting with Applications to Image Analysis and Automated Cartography". Comm. of the ACM 24: 381–395. doi:10.1145/358669.358692.
David A. Forsyth and Jean Ponce (2003). Computer Vision, a modern approach. Prentice Hall. ISBN 0-13-085198-1.
Richard Hartley and Andrew Zisserman (2003). Multiple View Geometry in Computer Vision (2nd ed.). Cambridge University Press.
P.H.S. Torr and D.W. Murray (1997). "The Development and Comparison of Robust Methods for Estimating the Fundamental Matrix". International Journal of Computer Vision 24: 271–300. doi:10.1023/A:1007927408552.
Ondrej Chum (2005). "Two-View Geometry Estimation by Random Sample and Consensus". PhD Thesis. http://cmp.felk.cvut.cz/~chum/Teze/Chum-PhD.pdf
Sunglok Choi, Taemin Kim, and Wonpil Yu (2009). "Performance Evaluation of RANSAC Family". In Proceedings of the British Machine Vision Conference (BMVC). http://www.bmva.org/bmvc/2009/Papers/Paper355/Paper355.pdf.
八、外部链接
RANSAC Toolbox for MATLAB. A research (and didactic) oriented toolbox to explore the RANSAC algorithm in MATLAB. It is highly configurable and contains the routines to solve a few relevant estimation problems.
Implementation in C++ as a generic template.
RANSAC for Dummies A simple tutorial with many examples that uses the RANSAC Toolbox for MATLAB.
25 Years of RANSAC Workshop
九、算法实现(C#、C++)
C# 实现:http://www.cnblogs.com/xrwang/p/SampleOfRansac.html,这篇文章很清晰的介绍了算法的设计步骤,并提供了非常规范的源代码,即便是用C#实现,稍微有点基础的人也能很容将其移植到C++平台上。强烈推荐。
C++ 实现:网上收集
#include <math.h>
#include "LineParamEstimator.h"
LineParamEstimator::LineParamEstimator(double delta) : m_deltaSquared(delta*delta) {}
/*****************************************************************************/
/*
* Compute the line parameters [n_x,n_y,a_x,a_y]
* 通过输入的两点来确定所在直线,采用法线向量的方式来表示,以兼容平行或垂直的情况
* 其中n_x,n_y为归一化后,与原点构成的法线向量,a_x,a_y为直线上任意一点
*/
void LineParamEstimator::estimate(std::vector<Point2D *> &data,
std::vector<double> ¶meters)
{
parameters.clear();
if(data.size()<2)
return;
double nx = data[1]->y - data[0]->y;
double ny = data[0]->x - data[1]->x;// 原始直线的斜率为K,则法线的斜率为-1/k
double norm = sqrt(nx*nx + ny*ny);
parameters.push_back(nx/norm);
parameters.push_back(ny/norm);
parameters.push_back(data[0]->x);
parameters.push_back(data[0]->y);
}
/*****************************************************************************/
/*
* Compute the line parameters [n_x,n_y,a_x,a_y]
* 使用最小二乘法,从输入点中拟合出确定直线模型的所需参量
*/
void LineParamEstimator::leastSquaresEstimate(std::vector<Point2D *> &data,
std::vector<double> ¶meters)
{
double meanX, meanY, nx, ny, norm;
double covMat11, covMat12, covMat21, covMat22; // The entries of the symmetric covarinace matrix
int i, dataSize = data.size();
parameters.clear();
if(data.size()<2)
return;
meanX = meanY = 0.0;
covMat11 = covMat12 = covMat21 = covMat22 = 0;
for(i=0; i<dataSize; i++) {
meanX +=data[i]->x;
meanY +=data[i]->y;
covMat11 +=data[i]->x * data[i]->x;
covMat12 +=data[i]->x * data[i]->y;
covMat22 +=data[i]->y * data[i]->y;
}
meanX/=dataSize;
meanY/=dataSize;
covMat11 -= dataSize*meanX*meanX;
covMat12 -= dataSize*meanX*meanY;
covMat22 -= dataSize*meanY*meanY;
covMat21 = covMat12;
if(covMat11<1e-12) {
nx = 1.0;
ny = 0.0;
}
else { //lamda1 is the largest eigen-value of the covariance matrix
//and is used to compute the eigne-vector corresponding to the smallest
//eigenvalue, which isn't computed explicitly.
double lamda1 = (covMat11 + covMat22 + sqrt((covMat11-covMat22)*(covMat11-covMat22) + 4*covMat12*covMat12)) / 2.0;
nx = -covMat12;
ny = lamda1 - covMat22;
norm = sqrt(nx*nx + ny*ny);
nx/=norm;
ny/=norm;
}
parameters.push_back(nx);
parameters.push_back(ny);
parameters.push_back(meanX);
parameters.push_back(meanY);
}
/*****************************************************************************/
/*
* Given the line parameters [n_x,n_y,a_x,a_y] check if
* [n_x, n_y] dot [data.x-a_x, data.y-a_y] < m_delta
* 通过与已知法线的点乘结果,确定待测点与已知直线的匹配程度;结果越小则越符合,为
* 零则表明点在直线上
*/
bool LineParamEstimator::agree(std::vector<double> ¶meters, Point2D &data)
{
double signedDistance = parameters[0]*(data.x-parameters[2]) + parameters[1]*(data.y-parameters[3]);
return ((signedDistance*signedDistance) < m_deltaSquared);
}
RANSAC寻找匹配的代码如下:
/*****************************************************************************/
template<class T, class S>
double Ransac<T,S>::compute(std::vector<S> ¶meters,
ParameterEsitmator<T,S> *paramEstimator ,
std::vector<T> &data,
int numForEstimate)
{
std::vector<T *> leastSquaresEstimateData;
int numDataObjects = data.size();
int numVotesForBest = -1;
int *arr = new int[numForEstimate];// numForEstimate表示拟合模型所需要的最少点数,对本例的直线来说,该值为2
short *curVotes = new short[numDataObjects]; //one if data[i] agrees with the current model, otherwise zero
short *bestVotes = new short[numDataObjects]; //one if data[i] agrees with the best model, otherwise zero
//there are less data objects than the minimum required for an exact fit
if(numDataObjects < numForEstimate)
return 0;
// 计算所有可能的直线,寻找其中误差最小的解。对于100点的直线拟合来说,大约需要100*99*0.5=4950次运算,复杂度无疑是庞大的。一般采用随机选取子集的方式。
computeAllChoices(paramEstimator,data,numForEstimate,
bestVotes, curVotes, numVotesForBest, 0, data.size(), numForEstimate, 0, arr);
//compute the least squares estimate using the largest sub set
for(int j=0; j<numDataObjects; j++) {
if(bestVotes[j])
leastSquaresEstimateData.push_back(&(data[j]));
}
// 对局内点再次用最小二乘法拟合出模型
paramEstimator->leastSquaresEstimate(leastSquaresEstimateData,parameters);
delete [] arr;
delete [] bestVotes;
delete [] curVotes;
return (double)leastSquaresEstimateData.size()/(double)numDataObjects;
}
前面提供的代码实现都是二维情况下形状的拟合。最近我们项目中要使用到三维情况下的直线拟合。可以仿照第一个C#代码编写,但是三维情况下很多判断标准、计算公式都会变化,这一点要注意。我是用的代码是从PCL(point cloud library )中提取出来的,实现思路是一样的,但其中用到了Eigen库中的数据结构来进行计算,基础差的人会比较难读懂,如果有时间我会改成C++ 中的基本数据结构来实现,其实看懂了是很容易改造的。
代码地址:http://www.oschina.net/code/snippet_588162_50399
来自为知笔记(Wiz)