移动节点和AP网络优化
In Proc. of Networking 2005, Waterloo, Canada, May 2005
Measuring Round Trip Times to Determine
the Distance between WLAN Nodes
Andr´ G¨ nther and Christian Hoeneeu
Telecommunication Networks Group (TKN), TU-Berlin, Germany
[email protected]|[email protected]
Abstract. This publication explores the degree of accuracy to which
the propagation delay of WLAN packets can be measured using today’s
commercial, inexpensive equipment. The aim is to determine the distance
between two wireless nodes for location sensing applications. We con-
ducted experiments in which we measured the time difference between
sending a data packet and receiving the corresponding immediate ac-
knowledgement. We found the propagation delays correlate closely with
distance, having only a measurement error of a few meters. Furthermore,
they are more precise than received signal strength indications.
To overcome the low time resolution of the given hardware timers, various
statistical methods are applied, developed and analyzed. For example,
we take advantage of drifting clocks to determine propagation delays
that are forty times smaller than the clocks’ quantization resolution.
Our approach also determines the frequency offset between remote and
local crystal clocks.
1
Introduction
Knowing the position of wireless nodes is required for location-aware services
and applications. The position can be calculated using the distance between
wireless nodes. Furthermore distance helps when deciding the time of handovers
or finding the optimal routing path throughout an ad-hoc network.
In this paper we focus on locating techniques which use the intrinsic fea-
tures of WIFI based wireless access. Usually, received signal strength indications
are applied to identify the location of wireless nodes. We show that precise dis-
tance measurement based on round trip time measurements of WLAN packets
is possible even with low-cost, commercial WLAN hardware. We developed the
algorithms to determine the air propagation time indirectly and to improve the
accuracy and resolution of the time measurements. We validated our approach
with two independent experimental measurement campaigns and with an ana-
lytical explanation.
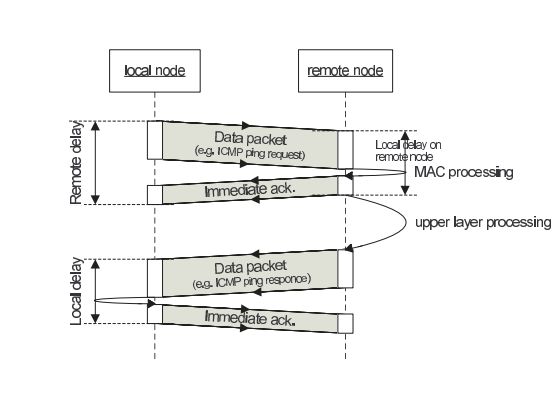
We utilize the following intrinsic feature of IEEE 802.11: Each unicast data
packet is immediately acknowledged by its receiver (Fig. 1). We took the time
This work has been supported by the Deutsche Forschungsgemeinschaft (DFG). This
publication is a condensed and enhanced version of [1]
between starting the transmission of a data packet and receiving the correspond-
ing immediate acknowledgement. We will refer to this as remote delay (dremote ).
We also measured the duration of receiving one data packet and sending out
the immediate acknowledgement. We will call this duration local delay (dlocal ).
The overall propagation time is then estimated by subtracting the local from
the remote delay.
c=
2 · distance
where c ≈ 3 · 108 m being the speed of light.sdremote − dlocal
(1)
In order to overcome the
problem of interrupt laten-
cies and hence inaccuracies
when measuring the duration
of packet transmission in the
operating system, we mea-
sured the time on the hard-
ware layer - the WLAN card.
Most WLAN solutions allow
to record time stamps at a
resolution of 1 µs. However,
a packet travels a distance of
300 m in 1 µs, which usually
exceeds the range of WLAN
transmission. We increase the
Fig. 1. Distance measurement: Transmission of resolution by using multiple
delay observations and apply-an ICMP ping sequence.
ing statistical methods to en-
hance the accuracy.
This paper is structured as follows: In Sect. 2 we refer to the state of the
art. Then we explain our approaches to enhance the measurement resolution. In
Sect. 4 we describe our experimental measurement campaigns. Finally, we briefly
summarize the results and contributions of this paper.
2
Related Work
A couple of approaches to in- and outdoor location sensing techniques have been
presented in [2]. An essential part of location sensing algorithms is a method to
determine the distance between two wireless nodes. In general, three methods
have been considered. Firstly, in case of densely populated networks such as
sensor networks [3] the information about which nodes are within transmission
range is used. Secondly, the received signal strength indication (RSSI) of data
packets transmitted is considered. It decreases sharply in a non-linear fashion
with distance, so that environment specific signal strength maps relating RSSI
values to positions have to be created first. An example for RSSI application is
2
the RADAR system [4], which has been one of the first approaches presenting
an indoor positioning system based on WLAN components (overview in [1]).
Thirdly, the propagation time of radio signals can be used because in free air it
linearly increases with distance. Such an approach is usually considered to be
impossible without the help of special signal processing hardware [5].
The classic approach to the latter method of position location estimates the
time of arrival (TOA) of pure radio signals (instead of WLAN packets). This is
conducted by applying signal processing algorithms based on cross-correlation
techniques [6]. The TOA method suffers from multi-path conditions. This prob-
lem can be encountered with a wider frequency band, e.g. ultra-wide band.
TOA measurement is being employed both outdoors for GPS-positioning [7]
and indoors to find things and people marked by a tag [8]. In the latter paper, the
author gives an appraisal of the achievable accuracy when measuring the round
trip TOA within the 2.44 GHz and 5.78 GHz bands. For a signal bandwidth of
40 MHz, the accuracy of 3.8 m can be an achievable resolution limit unless further
signal processing techniques are applied. Those might enhance the resolution up
to 1 m.
The only paper focussing on measuring pure packet propagation delays is [9].
The objective is to determine the speed of light using the averaged measured
round trip propagation delay of ping packets. The measurements were con-
ducted in a wired Ethernet infrastructure. Estimating the propagation delay
which ranges below the clock resolution was facilitated by employing the con-
cept of noise-assisted sub-threshold signal detection. For measurements in an
IEEE 802.11b wireless environment the round trip times were too variable and
noisy to be used.
3
Approach
Inspired by the approach presented in [9] we also use the mean round trip time
delay of packets to determine the distance as given in (1). In order to keep the
time measurements as unbiased as possible resulting in a high resolution, we try
to preclude any disruption caused by operating system activities. To do so, we
took the following action:
Firstly, we utilized the IEEE 802.11 data/acknowledgement sequence instead
of the ICMP-Ping request/response packet sequence. As the ping response is
generated by the operation system the time it takes is subject to a highly variable
delay. In contrast, the immediate acknowledgements are handled by the hardware
of the WLAN radio and hence highly predictable. As for our measurements we
assumed the MAC processing time to be equal on both wireless nodes. Although
the MAC processing time is standardized according to IEEE 802.11 we will prove
that not all WLAN cards operate in compliance with the standard. In practice,
the MAC processing time also depends on the chip set hardware and firmware
of the actual WLAN cards in use. To account for this a model-specific absolute
delay offset needs to be considered.
3
Secondly, we do not measure the time stamps for packet arrival and trans-
mission on the operating system layer, but on the WLAN card hardware layer.
This features measuring conditions that are independent of variable interrupt
latencies. In [10] we showed that measuring the time of a packet’s arrival in
the operating system’s kernel (e.g. during an interrupt) entails quite imprecise
results due to falsification by the variable interrupt latency.
The resolution of these hardware time stamps, which are implemented in
most current WLAN products, is 1 µs corresponding to 300 m. In terms of the
achievable accuracy this discrete time resolution is not precise enough yet. The
resolution increases when averaging numerous observations. In the following we
consider three phenomena that help to achieve a higher resolution.
Gaussian noise: The presence of measurement noise is assumed. Noise can be
caused by thermal noise in the received radio signal or by the presence of multi-
path environment. Also, the crystal clocks of the WLAN equipment are subject
to a constant clock drift and variable clock noise. Thus, the delay values are
not limited to only one value. (In Fig. 2 not only 323 µs can be observed but
also other values). If one assumes a Gaussian noise distribution with a suitable
strength, we can simply take the sample mean to enhance the resolution.
Stochastic Resonance: Instead of the explanation above the authors of [9]
suggested another statistic effect called stochastic resonance. The concept of
stochastic resonance was originally introduced as an explanation for the period-
ically recurrent ice ages. In the last two decades, it has been applied to explain
many physical phenomena [11]. In the realm of signal detecting stochastic res-
onance allows for detecting signals below the resolution of the measuring units
because the signal becomes detectable with the help of noise. Noise adds to the
signal so that it eventually exceeds the threshold given by the resolution of the
detecting device. Thus, the system is able to change its states. The state dura-
tions have random lengths, but the probability is high that one state remains
the same in the next observation.
Beat Frequencies: In our experiments (Fig. 4.3 in [1]) it can be observed that
the 323 and 324 values occur in blocks of regular patterns. But this effect cannot
be explained with the effect of stochastic resonance. Another effect can also
entail resolution enhancement even if measurement noise is missing: ’Relative
clock drift’ – both WLAN cards are driven by built-in crystal oscillators that
have nearly the same frequency. Due to tolerances, there is a slight drift between
both clocks which causes varying rounding errors.
Let us consider the impact of a discrete time resolution on the measurement
error. Firstly, we construct a model of the experiment setups. Instead of using
packets, we assume that a delta pulse is sent off from the local to the remote node.
After the delta pulse’s arrival another delta pulse is sent back to the local node
representing an acknowledgement. The local node can only process the impulses
only in discrete time steps tlocal ∈ N described with natural numbers. The same
is also valid for the remote node. It only reacts in discrete time steps, which are
4
tremote = δ + n where n ∈ N and phase offset of δ ∈ [0; 1[. We assume that
the clocks work at the same speed but with a phase offset. Moreover, another
assumption is that phase offset changes over time but not for the duration of
a round trip. The transmission of a delta impulse from one node to the other
takes the delay of dprop ∈ R+ , which is equal to the propagation time.
Let us assume that a delta impulse is sent off from the local node at the
time tout . It arrives the remote node after a period of dprop . Due to the discretelocal
MAC processing, the delta impulse is only identified at the next remote clock
impulse, which is:
(2)tout + dprop − δ + δtinremote =local
inAssuming a MAC processing duration equal to zero and toutremote = tremote , the
remote node immediately sends back a delta impulse representing the acknowl-
edgement. It arrives at the local node after a period of dprop , but is again only
recognized at the next local clock, which is
tin = toutlocalremote + dprop
Then, the observed round trip time rtt is (4).
rtt = tin − tout = tout + dprop − δ + δ + dprop − toutlocallocallocallocal
= dprop + δ + dprop − δ
(3)
(4)
Next, we assume that the phase changes from one to the next measurement. The
change is constant and is repeated after each phase period starting at zero again.
In the following, we only consider one phase period and assume that round trip
times are measured at all times. Thus, the number of observations is infinite.
The mean rtt over all phase offsets is calculated as follows.
1
1
rtt =
0
rtt dδ =
0
dprop + δ + dprop − δ dδ = 2 · dprop + 1
(5)
The variance of the quantization error is calculated as followed and is simplified
to a cubic function of the fractional part of the round trip distance. Both the
mean and variance are displayed in Fig. 3.
1
σ2 =
0
rtt − rtt
2
dδ = {2dprop } − {2dprop } =
2
1
4
− {2dprop } −
12
2
(6)
The rtt function produces a pattern which is repeated every phase period. This
reoccurrence introduces a frequency component to be present in the observations.
If two clocks interfere, their phases are equal every beat period, which is the
reciprocal of the beat frequency. The beat frequency is the difference of both
frequencies of both interfering waves ( 7).Thus, the impact of quantization errors
causes a similar effect as the two interfering waves – namely a beat frequency.
fbeat = |f1 − f2 |
5
(7)
Calculated distance and variance
discrete
distribution as
measured
real continuous
distribution as
assumed
3.0
322µs
323µs
324µs
325µs
0.0
0.5
1.0
1.5
2.0
2.5
mean
variance
0.0
0.2
0.4
0.6
0.8
1.0
continuous interval [323µs,325µs[
Actual distance
Fig. 2. Discrete distribution of noisy delay Fig. 3. Theoretical mean distance and
measurements.variance of distance.
Limits and Verification: The accuracy of location and distance sensing algo-
rithms have fundamental limits (refer to the citation in [1]). For example, the
analytic calculations above do not take into account the clock drift during one
RTT observation. Assuming a frequency stability of ±25 ppm and a length of
a transmission sequence of 60 µs and 320 µs, the maximal error could be up to
0.9 m and 4.8 m respectively.
Furthermore, one should note that only in vacuum light travels at the speed
of light c. In materials the propagation speed depends on the square root of
the dielectric constant ε. For example, dry ferroconcrete has an ε of about 9
and electromagnetic waves traverse through ferroconcrete 3 times slower than in
vacuum. Most other materials used in buildings have lower dielectric constants.
Another source of possible errors is due to non-line-of-sight conditions. This
results in an overestimation of the distance between the two nodes [12]. Multi-
path propagation might introduce measurement errors because the dominant
path can vary depending on the current transmission conditions. Multi-path
propagation is only present if reflections are given. Reflections can have large
impact on signal strength but only a low one on propagation delay. Thus, in
the presence of multi-path propagation or reflections, we assume time delay
measurement as being more precise than those based on the RSSI.
In order to check these hypotheses and identify the real measurement resolu-
tion, we conducted experiments. The first measurement campaign was conducted
to study the impact of slow-user motion on packet loss and delay as described
in [10]. At the same time, we also measured the impact of distance on the round
trip times. One year later, we embarked on a second measurement campaign.
We altered the radio modem technology, the location, the analysis software, and
the staff. The consistence of both results proves the reliability and correctness
of our approach.
6
4
Measurements: First and second campaign
Experimental setup: The measurement was conducted twice: First in a gymna-
sium [10] and later in the in the countryside where one could expect the channel
to be free of disturbing noise coming from other radiating devices. The data
communication took place between the local and the remote node. ICMP ping
packets were transmitted each 20 ms (A) respective 10 ms. The measurements
of RTT were conducted for several distances: First covering the range from 5 to
40 m, later extend to the maximal transmission range of 100 m.
At each distance, we measured for about 15 minutes respective 4 minutes.
One should note, that in this first campaign, the wireless LAN cards were sit-
uated close to the ground. Also, the directions of the antennas were selected at
random and were not recorded. This is important to know as it explains some
of the results presented later. In the second session the sender was placed on a
plastic table, whereas the receiver was installed on top of a 1.5 m wood-metal
ladder. This was to guarantee that a large percentage of the Fresnel-zone, an
elliptic space around the direct line-of-sight between both nodes is free of any
obstacles harming the transmission. This time, the antennas were directed to-
ward each other.
Equipment: The PCs were running a Suse 6.4 Linux system with a 2.4.17 kernel
(A). D-Link cards featuring an Intersil’s (now Conexant) Prism2 chipset were
employed as a wireless interface. Packets were directly sniffed on the MAC layer
by the measurement tool ‘Snuffle’.
The second time, we used an access point (Netgear FWAG114) support-
ing 802.11b/g as remote node. The PCs were running under Linux, Suse 9.1,
with a special 2.6 kernel. We used two different WLAN cards containing chip
sets from Atheros and Conexant implementing IEEE 802.11 a,b and g. The
Atheros cards (brand Netgear WAG-511, contained an AR5212 chip) are sup-
ported by the Madwifi device driver. We used the software version downloaded
from the CVS server on the August 30th , 2004. The Conexant cards (brand:
Longshine LCS-8531G containing Prism-GT chipset with an ISL3890 as MAC-
Controller) are controlled by the prism54.org device driver (date 28-06-2004,
firmware 1.0.4.3.arm). During each measurement both the sender and monitor
were equipped with cards of the same brand. To gather the packet traces, we
used tcpdump and libpcap.
Configuration: WLAN networking technologies based on the IEEE 802.11 stan-
dards transmit data packets via air. To avoid potential packet delay effects, in
the first experiments the maximal number of retransmissions (transmission type)
was set to zero. The second measurements were conducted in seven different con-
figurations to study the impact of the WLAN card, CPU clock and modulation
type. We used the default configuration of WLAN cards and access point but
changed the supported standard to 802.11g and set the modulation type to ei-
ther 36 or 54 Mbit/s. The frame length of the data packets are 65 bytes and of
the acknowledgements 14 bytes.
7
Time measurements: All three different WLAN cards recorded the arrival time
of packets at a resolution of 1 µs without any variable latency. The precise point
of time, at which the time stamp is recorded, is not documented. Also, the WLAN
chip sets feature only the recording of time stamps of incoming packets. But we
needed both sending and receiving time stamps. Therefore, we decided to use a
third PC to monitor the packets which the local node sends and receives. The
monitor PC was placed close-by the sender to avoid any additional propagation
delays that could falsify the measurements.
It will be straight forward to alter software and firmware of WLAN cards to
record transmission time stamps, too. Due to legal constraints, we were not able
to implement these changes by ourselves. We expect that WLAN chipset man-
ufactures will provide firmware updates to support precise time stamps because
they will benefit from customers using WLAN for location-aware services. Until
then, we are required to use the third monitoring node.
Data collection & processing: Snuffle provides the packet traces of all 802.11b
packets received at the monitoring node. We filtered-out only the successful ping
sequences which consist of an ICMP request, an acknowledgement, an ICMP
response and again an acknowledgement. Other packets like erroneous transmis-
sions, beacons, ARQ messages etc. were dropped. Due to hardware limitations
of the WLAN card only a fraction of observations were recorded.
Only the delays fitting in the interval [323 µs, 324 µs] are considered in further
calculations (Fig. 2). A few delay measurements were observed with the value
of 322 and 325 µs. These and all other delays were considered as measurement
errors. Taken the valid packet sequences, the mean and variance of the remote
delay and local delay were calculated. To check for stationary process properties,
the autocorrelation function was calculated.
In the second round, Tcpdump recorded the packet traces and wrote them
to files. After the measurements we used tcpdump to convert these files to plain
text files. Tcpdump had to be modified in order to print out the prism link-layer
headers. For statistical analysis the R project software turned out to be quite
efficient. Thus, this time we applied R programs to calculate the data’s analyzed
mean, variance and autocorrelation.
Results: The distance was directly derived from the measured propagation delay
using equation (1). Assuming a Gaussian error distribution, we also plotted the
confidence intervals in Fig. 4. In the first campaign the calculated distances were
always higher than the real distances. Also, in some measurements (e.g. 35 m)
the air propagation time was significantly higher. Due to the experimental setup,
we could not ensure that the direct line-of-sight path was taken. The remote node
was placed directly on the ground. Thus, the Fresnel zone was violated and the
direct transmission path was hampered.
In Fig. 5 the signal strength is displayed as a function of the distance. Theo-
retically, the signal strength should decrease with distance. In this measurement
campaign other factors, such as reflection, seem to be dominant. If one compares
Fig. 4 and Fig. 5, it seems time measurements reflect the distance more precisely
8
Calculated distance [m]
20 30 40 50 60 70
Received Signal Strength Indicator
Upper bound (95%)
Calculated distance
Actual Distance
Lower bound (5%)I
200
175
ICMP request
150
ACK req.
ICMP responce
ACK resp.
125
y = 104.32e-0.0019x
R2 = 0.0862
y = 106.33e-0.0024x
R2 = 0.1397
100
10
75
5
10
15
20
25
30
35
40
5
10
15 20 25 30
Actual Distance[m]
35
40
Distance [m]
Fig. 4. Distance as calculated from RTT Fig. 5. Received signal strength indica-
versus actual distance between both nodes. tion versus distance. Confidence inter-
95% confidence levels are given.vals are too small to be shown.
than RSSI but they have a higher variance and a larger confidence interval. The
results of the second round are illustrated in Fig. 6, which shows the remote
(blue) and local delay (red) measurements, the number of overall observations
(#) and the correlation coefficient (R) for the given configuration. A clear cor-
relation between actual distance and calculated distance can be identified. In
the right graph, one can see that the larger the distance (and the worse the link
quality), the larger the confidence interval becomes. In Fig. 9 we display the
variance of rtt observations over the distance. The curve is highly similar to the
curve described with (6). Thus, our beat-frequency explanation seems to be valid.
Analysis:In [1] we
show that the first mea-
surements follow a weak
stationary process, with
a constant mean, vari-
ance and covariance (for
a constant lag). Thus,
further statistical meth-
ods are applicable: Con-
fidence intervals are only
meaningful if the obser-
vations are independent.
This assumption can be
verified by the autocor-
relation function. The
time-lag dependent au-
tocorrelation coefficients
are presented as a graph
Fig. 6. Propagation delay (=calculated distance)
vs. actual distance (plus 95% conf. intervals).
(blue/upper lines=biased remote delay, red/lower
lines=biased local delays). Each value is based on at
least 1000 observations.
9
Fig. 7. Autocorrelation (=cross correla-
tion of itself) is oscillating for remote de-
lays – indicating a fundamental frequency
component in observations (at 40 m).
Fig. 8. The Fourier transformation of the
observations shows a dominant frequency
at 3.5 Hz, which is only present in the re-
mote delays. (at 40 m).
in Fig. 7. The 40 m results are shown as an example. The autocorrelation for
the local delay is low. It is smaller than ρ=0.05. Thus, the local delay measure-
ments can be seen as independent. The autocorrelation of remote delay values
has the shape of a decaying cosines wave. This kind of autocorrelation curve is
found if the observations feature a constant frequency component. Indeed, this
pattern arises in the delay traces. The values of 323 and 324 occur block-wise in
bursts. We also calculated an FFT over the packet delays. Assuming that each
observation follows the previous after 20 ms, we identified a dominant frequency
of about 3.5 Hz independent of the distance (Fig. 8). However, the lower the
packet error rate, the stronger this effect is. We also calculated the autocorrela-
tion of the second measurement’s second results, high and alternating correlation
coefficients were only present, if we used the Prism GT chip sets. We assume
that this observation is due to the clocking of the MAC protocol and due to the
frequency stability and accuracy of the WLAN quartz crystals. Further studies
are required to understand this effect in-depth. We explain the effect displayed
in Fig. 7 with interference of both remote and local crystal clocks. Taken this
explanation of quantization errors we can calculate the clock drift between both
signals. Assuming a clocking of the MAC protocol at 1 MHz, the drift between
3.5Hzboth clocks is approximately drif t = fbeat = 1MHz = 3.5ppm. Usually, thef1
tolerance of consumer grade quartz clocks is up to 25 ppm. Thus, we consider
this explanation to be plausible.
Interestingly, the MAC processing is conducted in steps of 1 µs. Thus, the
MAC processing time is not precisely the SIFS interval but is rounded up to the
next 1 µs. However, the error is small so that receivers tolerate it.
In our quantization error analysis we calculated the variance which is up to
1/4. A distance of one and a time unit of one in the analysis refer to 300 m or 1 µs
in the experiments. Then, the standard deviation would be 18.75 m or 62.5 ns at
most. The measured standard deviation ranges between 3.3 and 25 m. Thus, the
10
Fig. 9. The variance of rtt Fig. 10. The accuracy (cross correlation and standard
observations over time.error) over the number of observations per position.
quantization error is not the only dominant effect and others such as thermal
noise are important too.
We measured at each distance for 4 to 15 minutes. Is it really required to
measure that long? In Fig. 10 we consider only a subset of all rtt observations
taken during the second campaign. We display the correlation coefficient R and
the standard error over the number of observations per distance. With 500 to
1000 observations per position nearly the optimal accuracy is achieved. If one
assumes that a packet is sent off every mircosecond, the distance can be estimated
after 1 s of continues transmission.
5
Conclusion
We have presented an algorithm to measure the air propagation time of IEEE
802.11 packets with a higher accuracy. Using two different experimental setups,
we determined the precision of round trip time measurements. We used com-
mercial WLAN cards, supporting IEEE 802.11b and 802.11g, implemented with
three different WIFI chip sets. We have shown that such time measurements
are possible even with off-the-shelf, commercial WLAN equipment and without
additional signal processing hardware.
To overcome the low resolution of the clocks, numerous observations have to
be combined and smoothened. This can be carried out best during an ongoing
data transmission at no additional cost. We explained why smoothing indeed
helps to enhance the resolution of the time difference measurement so that dis-
tance measurements become possible. This effect can be due to the presence of
measurement noise and to the beat frequency resulting from drifting clocks. To
the best of our knowledge, especially the latter explanation is novel.
Our finding suggests that instead of RSSI the round trip time should be mea-
sured because it is correlated with the distance more strongly. In our gymnasium
measurement the RSSI has not been useful to identify the distance because –
due to reflections – the attenuation varied largely.
11
The contribution of this work is to show that neither synchronized, precise
clocks nor special hardware is required if the propagation delay between two
WLAN nodes is to be measured. This allows the implementation of easy-to-
use, cheap and precise indoor positioning systems, which do not require maps
containing signal strength distributions. However, WLAN chipset manufacturers
should update their firmware so that it reports the round trip time of packets
with an accuracy of at least 1 µs. Then, a 1000 packets transmission – achievable
in less than one second – can measure the distance with an error deviation of
less than 8 m.
Acknowledgements
We like to thank Prof. Wolisz for his ongoing support, E.-L. Hoene for the
revision, and Sven Lamprecht and David Hundenborn for conducting the second
measurements.
References
1. G¨nther, A., Hoene, C.: Measuring round trip times to determine the distance be-u
tween WLAN nodes. Technical Report TKN-04-016, Telecommunication Networks
Group, Technische Universit¨t Berlin (2004)a
2. Hightower, J., Borriello, G.: Location systems for ubiquitous computing. IEEE
Computer 34 (2001) 57–66
3. He, T., Huang, C., Blum, B.M., Stankovic, J.A., Abdelzaher, T.: Range-free lo-
calization schemes for large scale sensor networks. In: Proceedings of MOBICOM,
San Diego, CA, ACM Press (2003) 81–95
4. Bahl, P., Padmanabhan, V.N.: RADAR: An In-Building RF-Based User Location
and Tracking System. In: Infocom 2000, Tel-Aviv, Israel (2000) 775–784
5. Velayos, H., Karlsson, G.: Limitations in range estimation for wireless LAN. In:
Proc. 1st Workshop on Positioning, Navigation and Communication (WPNC’04),
Hannover, Germany (2004)
6. Alsindi, N., Li, X., Pahlavan, K.: Performance of TOA estimation algorithms in
different indoor multipath conditions. In: IEEE Wireless Communications and
Networking Conference (WCNC). Volume 1. (2004) 495–500
7. Enge, P., Misra, P., eds.: Special issue on GPS: The Global Positioning System,
IEEE (1999)
8. Werb, J., Lanzl, C.: Designing a positioning system for finding things and people
indoors. IEEE Spectrum 35 (1998) 71–78
9. Lepak, J., Crescimanno, M.: Speed of light measurement using ping. American
Physical Society - Meeting Abstracts (2002) abstract B2.009.
10. Hoene, C., G¨nther, A., Wolisz, A.: Measuring the impact of slow user motion onu
packet loss and delay over IEEE 802.11b wireless links. In: Proc. of Workshop on
Wireless Local Networks (WLN) 2003, Bonn, Germany (2003)
11. Gammaitoni, L., Hanggi, P., Jung, P., Marchesoni, F.: Stochastic resonance. Re-
views of Modern Physics 70 (1998) 223–287
12. Cong, L., Zhuang, W.: Non-line-of-sight error mitigation in mobile location. In:
Infocom 2004, Hong Kong (2004) 650– 659
12