关于Android 传感器坐标与摇一摇功能的简单实现
传感器分类
总体来说,传感器分为运动传感器和位置传感器两种。(此处忽略了一些温度、光照等环境传感器)。
运动传感器用来监测设备的运动,比如倾斜、震动和摇摆。运动传感器包括:加速度计、陀螺仪、重力感应器、线性加速度计、旋转向量传感器。
位置传感器用来监测设备的位置,即相对于世界坐标系的位置。包括地磁场传感器、接近传感器和方向传感器。
(方向传感器是基于软件的,根据加速度计和地磁场传感器导出)。
可以看出,手机的上述传感器读数,需要涉及到两个坐标系,一个是相对于手机自身,一个是相对于世界位置。
上面很多传感器是测量手机自身姿态的,那么它们读出的数是相对于手机坐标系的;
另一些传感器和方法,目的是测量手机在世界坐标系中的位置,那么它们的读数就是相对于世界坐标系的。
手机的自然坐标系
当一个设备被放在其默认的方向上时,X轴是水平指向右的,Y轴是垂直向上的,Z轴是指向屏幕正面之外的,即屏幕背面是Z的负值。
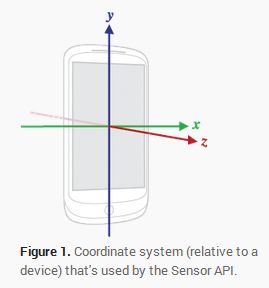
当设备运动或者旋转的时候,这些坐标轴是不会改变的,即它们是跟随手机的。
即是说,手机坐标系是跟随设备的自然方向的(但是请记住自然方向不一定是竖直,比如平板它的自然方向就很有可能是横向)。
使用这个坐标系的传感器:
Acceleration sensor
Gravity sensor
Gyroscope
Linear acceleration sensor
Geomagnetic field sensor
即是说它们的度数显示了在手机的这三个轴上的数字大小。
参考自:http://www.cnblogs.com/mengdd/archive/2013/05/19/3086781.html
-------------------------------------------------------------------------------------------------------------
摇一摇功能的实现
一、在 AndroidManifest.xml 中添加操作权限
[html] view plaincopyprint?
<uses-permission android:name="android.permission.VIBRATE"/>
二.代码逻辑
import android.app.Activity;
import android.hardware.Sensor;
import android.hardware.SensorEvent;
import android.hardware.SensorEventListener;
import android.hardware.SensorManager;
import android.os.Bundle;
import android.os.Handler;
import android.os.Message;
import android.os.Vibrator;
import android.util.Log;
import android.widget.Toast;
/**
* 安卓晃动手机监听--“摇一摇”
*
* @author jason0539
*
*/
public class TestSensorActivity extends Activity {
private SensorManager sensorManager;
private Vibrator vibrator;
private static final String TAG = "TestSensorActivity";
private static final int SENSOR_SHAKE = 10;
/** Called when the activity is first created. */
@Override
public void onCreate(Bundle savedInstanceState) {
super.onCreate(savedInstanceState);
setContentView(R.layout.main);
sensorManager = (SensorManager) getSystemService(SENSOR_SERVICE);
vibrator = (Vibrator) getSystemService(VIBRATOR_SERVICE);
}
@Override
protected void onResume() {
super.onResume();
if (sensorManager != null) {// 注册监听器
sensorManager.registerListener(sensorEventListener, sensorManager.getDefaultSensor(Sensor.TYPE_ACCELEROMETER), SensorManager.SENSOR_DELAY_NORMAL);
// 第一个参数是Listener,第二个参数是所得传感器类型,第三个参数值获取传感器信息的频率
}
}
@Override
protected void onStop() {
super.onStop();
if (sensorManager != null) {// 取消监听器
sensorManager.unregisterListener(sensorEventListener);
}
}
/**
* 重力感应监听
*/
private SensorEventListener sensorEventListener = new SensorEventListener() {
@Override
public void onSensorChanged(SensorEvent event) {
// 传感器信息改变时执行该方法
float[] values = event.values;
float x = values[0]; // x轴方向的重力加速度,向右为正
float y = values[1]; // y轴方向的重力加速度,向前为正
float z = values[2]; // z轴方向的重力加速度,向上为正
Log.i(TAG, "x轴方向的重力加速度" + x + ";y轴方向的重力加速度" + y + ";z轴方向的重力加速度" + z);
// 一般在这三个方向的重力加速度达到40就达到了摇晃手机的状态。
int medumValue = 19;// 如果不敏感请自行调低该数值,低于10的话就不行了,因为z轴上的加速度本身就已经达到10了
if (Math.abs(x) > medumValue || Math.abs(y) > medumValue || Math.abs(z) > medumValue) {
vibrator.vibrate(200);
Message msg = new Message();
msg.what = SENSOR_SHAKE;
handler.sendMessage(msg);
}
}
@Override
public void onAccuracyChanged(Sensor sensor, int accuracy) {
}
};
/**
* 动作执行
*/
Handler handler = new Handler() {
@Override
public void handleMessage(Message msg) {
super.handleMessage(msg);
switch (msg.what) {
case SENSOR_SHAKE:
Toast.makeText(TestSensorActivity.this, "检测到摇晃,执行操作!", Toast.LENGTH_SHORT).show();
Log.i(TAG, "检测到摇晃,执行操作!");
break;
}
}
};
}