NTU-Coursera机器学习:机器学习的可行性 & 训练与测试
提纲
机器学习的可行性 & 訓練與測試内容如:
1. 引入计算橙球概率问题
2. 通过用Hoeffding's inequality解决上面的问题,并得出PAC的概念,证明采样数据学习到的h的错误率可以和全局一致是PAC的
3. 将得到的理论应用到机器学习,证明实际机器是可以学习
4. 二元分类的 Effective Number
5. 一般备选函数的 EffectiveNumber
6. break point
=======================
Learning is Impossible机器学习的可行性
假设有如下学习问题: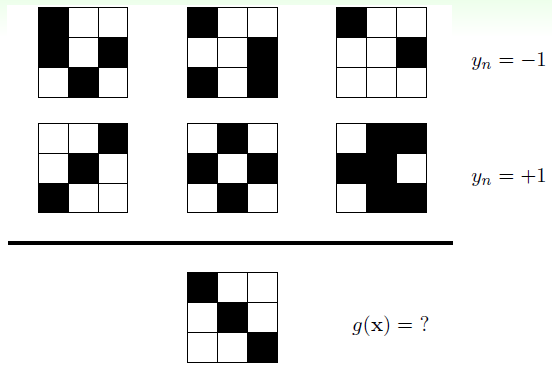
训练数据D包含了6张3*3的黑白图片,并给出了对应的输出,根据这些信息确定一个近似目标函数g,并用g计算最下方图片的输出。
甲认真看了下发现第一行三张图片左上角都是黑色色块,第二行三张图片左上角都是白色色块,最下面那张左上角是黑色,所以g(x)=-1;乙发现第一行三张图片都不是对称的,第二行三张图片总能找到一个对称轴,而最下面那张图也有一个对称轴,所以g(x)=+1。在这个例子中,你给出一个备选的g函数,总能找到另一个g'函数在D上成立,并且输出与g相反,也即,在D上正确的g,在D以外的数据上不一定正确!更苦逼的是,D以外的计算结果我们无法验证它的正确性!
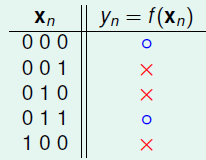
再举一个相似的例子:
输入集{χ}={0,1}^3;
输出集{η}={○,x}
训练数据D ===>>
由于该问题比较简单,我们可以把所有在D上成立的备选函数 fi 枚举出来:
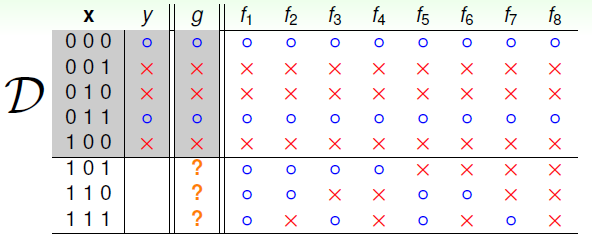
f1 ~ f8 都有可能是函数g,但是我们确定不了。在上面的两个例子中,在D的基础上都能得出不止一个备选函数 fi,并且无法确定这些备选函数的正确性。对于这样的问题,可以讲机器学习是无能为力的。
Probability to the Rescue概率方法
如果有一个装有很多(数量很大以至于无法通过数数解决)橙色球和绿色球的罐子,我们能不能推断橙色球的比例?根据上一节,用有限的数据D,去推测D超集上的目标函数f有可能会失败。这种用已知推测未知的问题在概率论中同样存在:
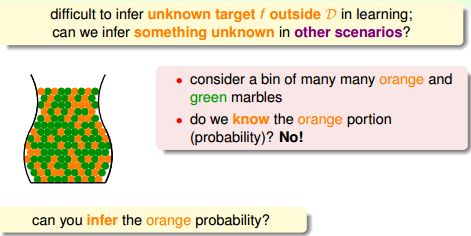
很明显的思路是利用统计中抽样的方法,既然我们无法穷尽数遍所有罐子中的球,不如随机取出几个球,算出其中两种颜色球的比例去近似得到我们要的答案,
在一个罐子里,放着很多小球,他们分两种颜色{橘色,绿色}。有什么办法能够推测橘色小球所占的比例?从罐中随机抓一把小球,有N个。假设:罐中橘色球的比例为μ(未知),抓出来的样本中橘色球的比例为ν(已知)。ν能代表μ吗?
根据概率论中的霍夫丁不等式(Hoeffding’s Inequality),若N足够大,ν就很可能接近μ。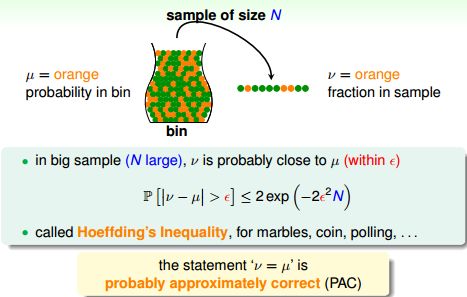
这里v 是样本概率;u 是总体概率。
Connection to Learning概率方法与学习问题的联系
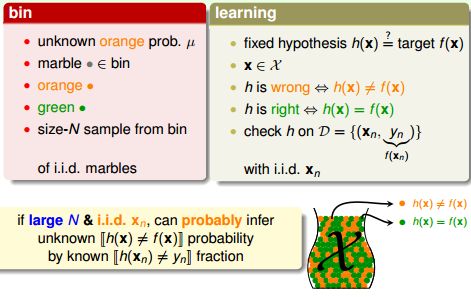
映射中最关键的点是讲抽样中橙球的概率理解为样本数据集D上h(x)错误的概率,以此推算出在所有数据上h(x)错误的概率,这也是机器学习能够工作的本质,即我们为啥在采样数据上得到了一个假设,就可以推到全局呢?因为两者的错误率是PAC的,只要我们保证前者小,后者也就小了。
橘色球的比例μ --》备选函数h(x)的正确性(是否接近f(x)),h∈H
罐子中的小球 --》 输入集{χ}
作为样本的N个小球 --》 训练集D={ xi, yi } ( i=1, ... ,N) D∈{χ}
橘色小球 --》h(xi)错误,或h(xi)≠f(xi)
绿色小球 --》h(xi)正确,或h(xi)=f(xi)
这里假设小球与数据x都是独立同分布的。
显然,N足够大的时候可以用D上的 [h(x)≠f(x)] 来推测{χ}上的 [h(x)≠f(x)]。就是说,如果样本足够大,那么备选函数h在D上犯错误的比例接近其在{χ}上犯错误的比例。
设某一备选函数h在D上的犯错比例为E-in(h),在整个输入集上的犯错比例为E-out(h),则有:

这意味着我们可以根据备选函数h在D上的表现来衡量它的正确性,并最终从备选函数集H中选出最优的那个h作为g,且g≈f
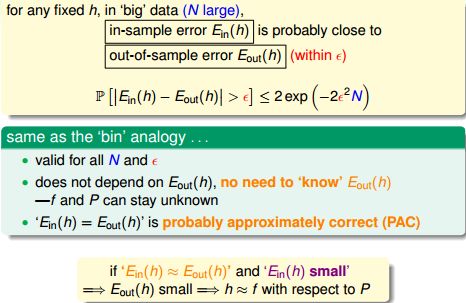
请注意,以上都是对某个特定的假设,其在全局的表现可以和其在DataSet的表现PAC,保证DataSet表现好,就能够推断其能泛化。可是我们往往有很多假设,我们实际上是从很多假设中挑一个表现最好(Ein最小)的作为最终的假设,那么这样挑的过程中,最小的Ein其泛化能力一定是最好么?肯定不是。
对于一个固定的假设h, 我们需要验证它的错误率;然后根据验证的结果选择最好的h。
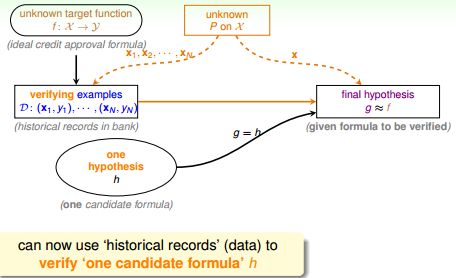
Connection to Real Learning真实的机器学习
到此为止万无一失了吗?No,因为概率论喜欢与人开玩笑。举个例子,150个人,每人抛一个硬币5次,至少有一个人5次皆为人头向上的概率为:
1 - (31/32)^150 = 99.15%所以一个小概率事件如果重复多次,他发生的概率就会变得很大。
同理,如下情形是有可能的:
学习算法A在备选函数集H中(含有很多h)孜孜不倦地挑选着h,突然找到一个hi,发现它在D上没犯错误或只犯了很少错误,A高兴大喊:我找到g了,就是这个hi!但实际上这个hi在{χ}上却犯了很多错误(E-in(hi)与E-out(hi)差很远)。对于这个hi来说,D是一个坏样本(Bad Sample)。
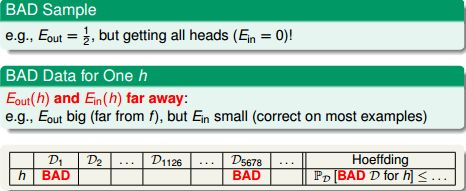
H中可能提取若干样本Di,{ i= 1, 2,3 . . . },对于某一个h来说,其中一些样本是Bad Sample。那么对于任意样本D和给定的h,有:
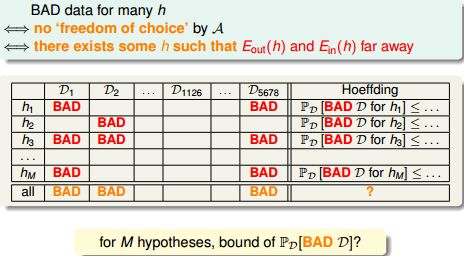
面对多个h 做选择时,容易出现问题。比如,某个不好的h 刚好最初的”准确“ 的假象。在整个备选函数集H(有M个元素)上,以下4个命题等价:
- ---》D是H的Bad Sample
- ---》D是某些h的Bad Sample
- ---》学习算法A不能在H中做自由筛选
- ---》存在某些h使得E-in(h)与E-out(h)差很远
随着h 的增加,出现这种假象的概率会增加。发生这种现象的原因是训练数据质量太差。
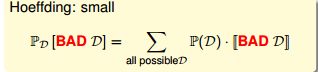
所以,D-1126这样的训练数据集是比较优质的。对于某个假设h, 当训练数据对于h 是BAD sample 时, 就可能出现问题。因此,我们希望对于我们面对的假设空间,训练数据对于其中的任何假设h 都不是BAD sample。给定任意D,它是某些H的Bad Sample的概率为:
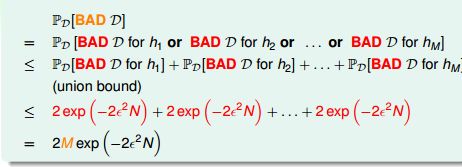
所以,当假设空间有限时(大小为M)时, 当N 足够大,发生BAD sample 的概率非常小。此时学习是有效的。当假设空间无穷大时,例如感知机空间. 即H中备选函数的数量M越少,样本数据量N越大,则样本成为坏样本的概率越小。在一个可接受的概率水平上,学习算法A只需要挑选那个表现最好的h作为g就行了。
以上推论成立的必要条件是M有限,当M→∞时怎么办? 接下来我们讨论。
回顾:機器學習的可行性
基于统计的学习流程:
- ---》如果备选函数集的大小|H|=M,M有限,训练数据量N足够大,则对于学习算法A选择的任意备选函数h,都有 E-out(h)≈E-in(h)
- ---》如果A找到了一个备选函数,使得E-in(h)≈0,则有很大概率E-out(h)≈0 ---》学习是可能的
可以讲,机器学习有两个核心问题:
- 我们能否保证E-out(h)与E-in(h)足够接近?
- 我们能否使E-in(h)足够小?
对于M→∞的情况,能否把它reduce到有限,是这一讲将要讨论的问题。
最重要的是公式:

(1) 假设空间H有限(M),且训练数据足够大,则可以保证测试错误率Eout 约等于训练错误率Ein;
(2)如果能得到Ein 接近于零,根据(1),Eout 趋向于零。
以上两条保证的学习的可能性。
可知,假设空间H 的大小M 至关重要,我们接下来会力求找一个H 大小的上界。
M存在重要的trade-off 思想:
(1)当M 很小,那么坏数据出现的概率非常小(见第四讲分析),学习是有效的;但是由于假设空间过小,我们不一定能找到一个方案,可以使训练误差接近零;
(2)反之,若M 很大,坏数据出现的概率会变大。
若假设空间无限大(比如感知机),学习一定是无效的吗?这门在下面力图回答这个问题。
假设空间H 大小:M.根据上面的公式,当M 无限大时是无法有效学习的;主要是我们在计算M 是通过UNION BOUND 的方式,这样得到的上界太宽松了;实际上,由于不同假设下发生坏事情是有很多重叠的,其实我们可以得到比M小得多的上界。
二元分类的 Effective Number
回顾一下霍夫丁不等式的推导:在训练数据集D上,有一个不好的备选函数h使得
![]()
只要有一个h不好,就可以认为这个H与D的搭配是不好的
![]()
为了让A能够自由选择,我们要求这个坏事件的发生概率必须小于某一个可以接受的值,考虑最坏的情况,利用Union Bound 获得上述概率的上限

![]()
这里Union Bound所代表的情况只有在M个事件没有交集的时候才发生。因此Union Bound过于高估了坏事件发生概率的上限。
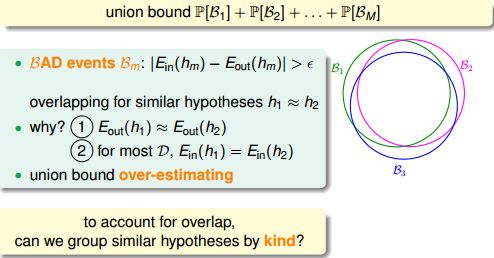
具体来说,假如有两个相似的备选函数h1≈h2 ,则h1与h2在D上几乎是同好或同坏的,或曰B1与B2高度相关,P[B1]与P[B2]可以合并,但Union Bound却将他们相加了。解决过分估计的问题,可以将备选函数集分类,相似的函数分在一起。以二元分类问题为例,备选函数集为:
其中有无数条线。
1). 当只有一个输入时,这些线可以被分成两类(第一类,输出为○;第二类,输出为×。)。

2).输入变成2个,显然有4种划分。

3). 输入变成3个,可以有8种划分。

也可能只有6种。

此时3个输入共线。所以3个输入情况下最多8种划分;
4). 输入变成4个,最多14种划分。

综上,N个输入下线性划分的最大个数即线性划分有效数(Effective Number of Lines),这里可以理解成有效划分。由于是二分类问题,线性划分有效数一定 ≤ 2^N,我们希望:

1. 用线性划分有效数代替M,从而将无限reduce到有限;
2. 线性划分有效数 << 2^N,从而坏事件的发生概率上限不至于随着N的增大而指数增长。
一般备选函数的 EffectiveNumber
备选函数集中的每一个函数h都是输入X到输出Y的一个映射:

就包括了所有对D的dichotomies。
定义成长函数(Growth Function)为:

即成长函数是在N个输入上dichotomies的最大数量。举个例子,平面二元分类,输入为3时,如果3个点共线,有6个划分,如果3个点不共线也不重合,有8个划分,所以此时成长函数值为8。
========================================================================
Positive Ray

输入(x1,x2,...,xN)分布在实数轴上,确定一个分割点a,大于a的输出+1,小于a的输出-1。
![]()
显然,有N个输入,实数轴被分成N+1段,Positive Ray的成长函数为

此时N+1 << 2^N (N is large)。
========================================================================
Positive Interval

输入(x1,x2,...,xN)分布在实数轴上,确定一个范围[ l, r ),在范围内的输出+1,其他输出-1。
![]()
N个输入,实数轴被分成N+1段,从其中任选两段构成一个interval,或两端落在同一段中,Positive Interval的成长函数为

========================================================================
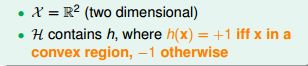
Convex Set - 凸集

顾名思义,划分区域必须是凸的。左图蓝色区域是凸集,右图则不是。
凸集的成长函数长什么样?
假设N个输入(x1, x2, ..., xN)在2维空间中刚好位于一个圆上,给定任意一种dichotomy,总能找出一个凸集刚好包含了所有+1的点,并将-1的点排斥在外。


的上限,从而不必关心N个输入不在一个圆上的情况。我们可以说:
![]()
break point
在霍夫丁不等式中,用成长函数代替M:
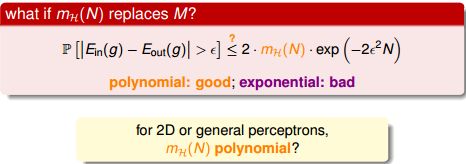
如果成长函数是指数函数,则随着N的增大,概率上限也急剧增加,所以我们希望成长函数是多项式。
回顾下上一小节的4个成长函数:

Positive Ray和Positive Interval的成长函数是多项式,而Convex Set的成长函数是指数函数。那2D-PLA的成长函数是多项式吗?
为了回答这个问题,引入一个新概念 - Break Point。
有k个输入,如果它不能被当前的备选函数集H shatter,那么k就是H的一个Break Point。
或者说对于任意k个输入,H都无法穷尽所有可能的划分。
这里讨论的Break Point指的是minimum break point k,也就是第一个被shatter的N。
对于2D-PLA,break point k = 4。

而Break Point 与成长函数的成长性到底有什么关系?
首先我们能确定,对于二元分类问题,如果一个H没有break point,给定任意N,一定能找到N个输入,H能穷尽它的所有划分,此时:
![]()
如果 break point = k 从上图可以猜测:
![]()
如果猜测成立,那么只要N足够大,训练结果的正确性就有保障了~~~
关于Machine Learning更多讨论与交流,敬请关注本博客和新浪微博songzi_tea.