OpenCV2马拉松第22圈——Hough变换直线检测原理与实现
计算机视觉讨论群162501053
转载请注明:http://blog.csdn.net/abcd1992719g/article/details/27220445
收入囊中
- Hough变换
- 概率Hough变换
- 自己实现Hough变换直线检测
葵花宝典
先看一下我实现的效果图
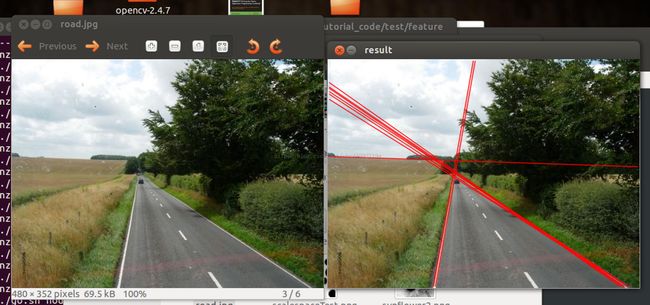
下面,我们进入Hough变换的原理讲解。
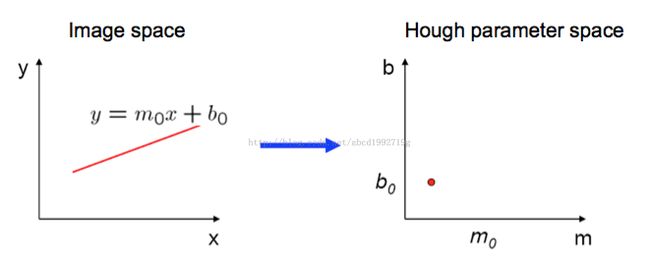
看上图,我们知道,经过一点(x0,y0)的直线可以表示成y0 = mox + b0
反过来看方程,b = –x0m + y0 ,于是我们从原来的坐标系转移到了Hough空间,m是横坐标,b是纵坐标
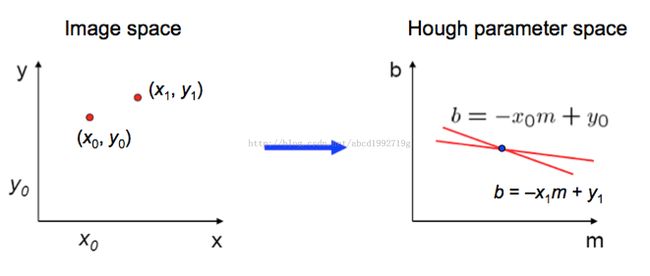
刚才提到,经过(x0,y0)的直线具有的特征是b = –x0m + y0,在Hough空间下也是一条直线,
那么经过(x1,y1)的直线具有的特征是b = -x1m + y1,在Hough空间下是另一条直线。
两条直线的相交点的(m,b)就是经过(x0,y0)(x1,y1)的直线,这个应该可以理解吧。
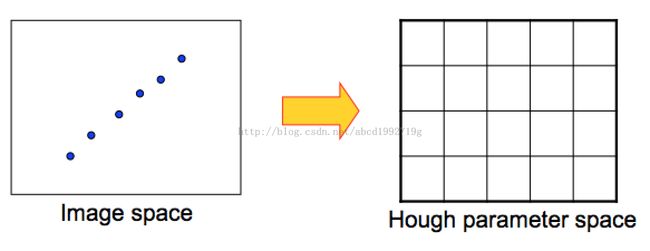
于是就有了一个简单的想法,对于每一个点,在Hough空间中都画出一条直线,对于每条直线经过的点,都填充在如下的 Hough空间中,看哪交点多,就能确定。我们用一个二维数组表示Hough空间,如下。最后就变成数哪些格子的值比较高。
但是,用m和b有局限性。因为m是可以取到无穷大的,所以这个特征只在理论上可行...实际上我们不可能申请一个无限大的二维数组。
自然而然,我们想到了极坐标,在极坐标下,就没有这个限制了。
在极坐标下,我们的直线可以写成:
也就是:
经过点(x0,y0)的直线:
当x0 = 8, y0 = 6,我们有这样的图
我们在下面只考虑 并且 .
我们还有2个点,, , ,就可以绘制出下面的图形
这3条直线相交于, 也就是说 () = 是这3个点 , 共同经过的直线!
因此,我们有了算法雏形 ![]()
• 初始化H( Hough空间的二维数组)全为0
• 遍历图片的 (x,y)
For θ = 0 to 360
ρ = xcos θ + y sin θ
H(θ, ρ) = H(θ,ρ) + 1
end
end
ρ = xcos θ + y sin θ
H(θ, ρ) = H(θ,ρ) + 1
end
end
• Find the value(s) of (θ, ρ)where H(θ, ρ)is a local maximum
• Thedetected line in the image is given by ρ = xcos θ + y sin θ
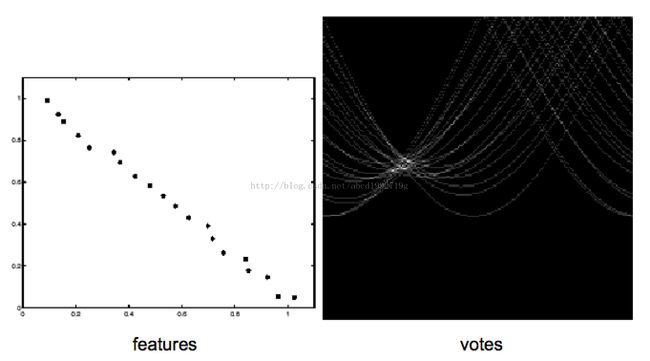
看下面的图片,当都一条直线时,Hough空间的某个区域就会很亮,取局部极大值就可以
一张更复杂的图片
初识API
- C++: void HoughLines (InputArray image, OutputArray lines, double rho, double theta, int threshold, double srn=0, double stn=0 )
-
- image – 8-bit,单通道二值图(有可能被函数改变)
- lines – 输出vector,是 的vector. 是距离原点距离 (图片左上角[0,0]处). ( ).
- rho – 累加器的半径resolution
- theta – 累加器的theta resulution
- threshold – 返回Hough空间中 ( ).的点
- srn – For the multi-scale Hough transform, it is a divisor for the distance resolution rho . The coarse accumulator distance resolution is rho and the accurate accumulator resolution is rho/srn . If both srn=0 and stn=0 , the classical Hough transform is used. Otherwise, both these parameters should be positive.
- stn – For the multi-scale Hough transform, it is a divisor for the distance resolution theta.
- C++: void HoughLinesP (InputArray image, OutputArray lines, double rho, double theta, int threshold, double minLineLength=0, double maxLineGap=0 )
-
- image –8-bit,单通道二值图(有可能被函数改变)
- lines – 输出向量是4-element vector , 是起点 是终点
- rho – Distance resolution of the accumulator in pixels.
- theta – Angle resolution of the accumulator in radians.
- threshold – Accumulator threshold parameter. Only those lines are returned that get enough votes ( ).
- minLineLength – 最小长度,小于这个值不被认为是线段
- maxLineGap – 两个点之间最大的gap,当小于这个值两个点就被认为是同一线段的点
荷枪实弹
还是先贴出官方sample
#include <cv.h>
#include <highgui.h>
#include <math.h>
using namespace cv;
int main(int argc, char** argv)
{
Mat src, dst, color_dst;
if( argc != 2 || !(src=imread(argv[1], 0)).data)
return -1;
Canny( src, dst, 50, 200, 3 );
cvtColor( dst, color_dst, CV_GRAY2BGR );
#if 0
vector<Vec2f> lines;
HoughLines( dst, lines, 1, CV_PI/180, 100 );
for( size_t i = 0; i < lines.size(); i++ )
{
float rho = lines[i][0];
float theta = lines[i][1];
double a = cos(theta), b = sin(theta);
double x0 = a*rho, y0 = b*rho;
Point pt1(cvRound(x0 + 1000*(-b)),
cvRound(y0 + 1000*(a)));
Point pt2(cvRound(x0 - 1000*(-b)),
cvRound(y0 - 1000*(a)));
line( color_dst, pt1, pt2, Scalar(0,0,255), 3, 8 );
}
#else
vector<Vec4i> lines;
HoughLinesP( dst, lines, 1, CV_PI/180, 80, 30, 10 );
for( size_t i = 0; i < lines.size(); i++ )
{
line( color_dst, Point(lines[i][0], lines[i][1]),
Point(lines[i][2], lines[i][3]), Scalar(0,0,255), 3, 8 );
}
#endif
namedWindow( "Source", 1 );
imshow( "Source", src );
namedWindow( "Detected Lines", 1 );
imshow( "Detected Lines", color_dst );
waitKey(0);
return 0;
}
假如我们想检测直线,就可以用第一个API,因为这个API返回的是直线的两个参数
如果想检测图片中的线段,就用第二个API,因为这个 API返回的是起点和终点
下面看下我自己的实现,首先是弧度及结构体的定义
const double pi = 3.1415926f;
const double RADIAN = 180.0/pi;
struct line
{
int theta;
int r;
};
vector<struct line> houghLine(Mat &img, int threshold)
{
vector<struct line> lines;
int diagonal = floor(sqrt(img.rows*img.rows + img.cols*img.cols));
vector< vector<int> >p(360 ,vector<int>(diagonal));
for( int j = 0; j < img.rows ; j++ ) {
for( int i = 0; i < img.cols; i++ ) {
if( img.at<unsigned char>(j,i) > 0)
{
for(int theta = 0;theta < 360;theta++)
{
int r = floor(i*cos(theta/RADIAN) + j*sin(theta/RADIAN));
if(r < 0)
continue;
p[theta][r]++;
}
}
}
}
//get local maximum
for( int theta = 0;theta < 360;theta++)
{
for( int r = 0;r < diagonal;r++)
{
int thetaLeft = max(0,theta-1);
int thetaRight = min(359,theta+1);
int rLeft = max(0,r-1);
int rRight = min(diagonal-1,r+1);
int tmp = p[theta][r];
if( tmp > threshold
&& tmp > p[thetaLeft][rLeft] && tmp > p[thetaLeft][r] && tmp > p[thetaLeft][rRight]
&& tmp > p[theta][rLeft] && tmp > p[theta][rRight]
&& tmp > p[thetaRight][rLeft] && tmp > p[thetaRight][r] && tmp > p[thetaRight][rRight])
{
struct line newline;
newline.theta = theta;
newline.r = r;
lines.push_back(newline);
}
}
}
return lines;
}
最后是画直线的函数
void drawLines(Mat &img, const vector<struct line> &lines)
{
for(int i = 0;i < lines.size();i++)
{
vector<Point> points;
int theta = lines[i].theta;
int r = lines[i].r;
double ct = cos(theta/RADIAN);
double st = sin(theta/RADIAN);
//r = x*ct + y*st
//left
int y = int(r/st);
if(y >= 0 && y < img.rows){
Point p(0, y);
points.push_back(p);
}
//right
y = int((r-ct*(img.cols-1))/st);
if(y >= 0 && y < img.rows){
Point p(img.cols-1, y);
points.push_back(p);
}
//top
int x = int(r/ct);
if(x >= 0 && x < img.cols){
Point p(x, 0);
points.push_back(p);
}
//down
x = int((r-st*(img.rows-1))/ct);
if(x >= 0 && x < img.cols){
Point p(x, img.rows-1);
points.push_back(p);
}
cv::line( img, points[0], points[1], Scalar(0,0,255), 1, CV_AA);
}
}
完整代码
#include "opencv2/imgproc/imgproc.hpp"
#include "opencv2/highgui/highgui.hpp"
#include <iostream>
#include <vector>
#include <cmath>
using namespace cv;
using namespace std;
const double pi = 3.1415926f;
const double RADIAN = 180.0/pi;
struct line
{
int theta;
int r;
};
/*
* r = xcos(theta) + ysin(theta)
*/
vector<struct line> houghLine(Mat &img, int threshold)
{
vector<struct line> lines;
int diagonal = floor(sqrt(img.rows*img.rows + img.cols*img.cols));
vector< vector<int> >p(360 ,vector<int>(diagonal));
for( int j = 0; j < img.rows ; j++ ) {
for( int i = 0; i < img.cols; i++ ) {
if( img.at<unsigned char>(j,i) > 0)
{
for(int theta = 0;theta < 360;theta++)
{
int r = floor(i*cos(theta/RADIAN) + j*sin(theta/RADIAN));
if(r < 0)
continue;
p[theta][r]++;
}
}
}
}
//get local maximum
for( int theta = 0;theta < 360;theta++)
{
for( int r = 0;r < diagonal;r++)
{
int thetaLeft = max(0,theta-1);
int thetaRight = min(359,theta+1);
int rLeft = max(0,r-1);
int rRight = min(diagonal-1,r+1);
int tmp = p[theta][r];
if( tmp > threshold
&& tmp > p[thetaLeft][rLeft] && tmp > p[thetaLeft][r] && tmp > p[thetaLeft][rRight]
&& tmp > p[theta][rLeft] && tmp > p[theta][rRight]
&& tmp > p[thetaRight][rLeft] && tmp > p[thetaRight][r] && tmp > p[thetaRight][rRight])
{
struct line newline;
newline.theta = theta;
newline.r = r;
lines.push_back(newline);
}
}
}
return lines;
}
void drawLines(Mat &img, const vector<struct line> &lines)
{
for(int i = 0;i < lines.size();i++)
{
vector<Point> points;
int theta = lines[i].theta;
int r = lines[i].r;
double ct = cos(theta/RADIAN);
double st = sin(theta/RADIAN);
//r = x*ct + y*st
//left
int y = int(r/st);
if(y >= 0 && y < img.rows){
Point p(0, y);
points.push_back(p);
}
//right
y = int((r-ct*(img.cols-1))/st);
if(y >= 0 && y < img.rows){
Point p(img.cols-1, y);
points.push_back(p);
}
//top
int x = int(r/ct);
if(x >= 0 && x < img.cols){
Point p(x, 0);
points.push_back(p);
}
//down
x = int((r-st*(img.rows-1))/ct);
if(x >= 0 && x < img.cols){
Point p(x, img.rows-1);
points.push_back(p);
}
cv::line( img, points[0], points[1], Scalar(0,0,255), 1, CV_AA);
}
}
int main( int, char** argv )
{
Mat src,src_gray,edge;
src = imread( argv[1] );
cvtColor( src, src_gray, CV_BGR2GRAY );
blur( src_gray, src_gray, Size(3,3) );
Canny( src_gray, edge, 50, 200);
vector<struct line> lines = houghLine(edge, 90);
drawLines(src, lines);
namedWindow("result", 1);
imshow("result", src);
waitKey();
return 0;
}
举一反三
概率Hough变换在基本算法上增加了比较少的修改。之前是逐行扫描,现在则是随机选点。每当累加器的一个条目达到指定的最小值,就沿这条直线的方向扫描,并且将通过它的所有点删除(即使它们还没有参与投票)。而且该扫描还确定被接受的线段的长度。为此,该算法定义了两个附加参数。一个是被接受线段的最小长度,而另一个是被允许以形成连续的段的最大距离。这个附加步骤增加了算法的复杂性,但是复杂性带来的效率损失被较少的点会参与投票过程补偿。
我们再来看一看其他形状在二维 Hough空间的样子


我们再考虑一下噪声的影响
噪声使得峰值定位很难
解决噪声问题的算法:

这个算法也不复杂,对于一个点,我们以前要遍历[0,360]的角度,但是现在,这个角度就直接被我们取出来了,速度也有很大的提升,非常不错的算法。