基于感知Hash算法的视觉目标跟踪
基于感知哈希算法的视觉目标跟踪
http://blog.csdn.net/zouxy09
偶然看到这三篇博文[1][2][3],提到图片检索网站TinEye和谷歌的相似图片搜索引擎的技术原理。以图搜图搜索引擎的使命是:你上传一张图片,然后他们尽全力帮你把互联网上所有与它相似的图片搜索出来。当然了,这只是他们认为的相似,所以有时候搜索结果也不一定对。事实上,以图搜图三大搜索引擎除了上面的老牌的TinEye和Google外,还有百度上线不算很久的新生儿:百度识图。之前听余凯老师的一个Deep Learning的讲座,里面很大一部分就介绍了百度识图这个产品,因为它是Deep Learning在百度成功上线的一个应用。里面详尽的把百度识图和谷歌的PK了一番。如果我没有听错和记错的话,余凯老师所介绍的百度识图也是应用了卷积神经网络CNN的,还有非常霸气的一点是:余凯老师说百度几乎都是监督学习!在厦门还是哪,有200人每天给百度标数据。这财力,气度全在上面了,没什么好说的了。
跑题了,我们回到这三篇博文提到的谷歌的以图搜图搜索引擎,博文中提到,这个网站提到了该引擎实现相似图片搜素的关键技术叫做“感知哈希算法”(Perceptual hash algorithm),它的作用是对每张图片生成一个“指纹”(fingerprint)字符串,然后比较不同图片的指纹。结果越接近,就说明图片越相似。(不知道是不是真的那么简单,哈哈)
但在这里,我考虑的不是图片检索,而是跟踪。因为既然它可以衡量两个图片的相似性,那么我就在想,那它就可以拿来做目标跟踪了,只要在每一帧找到和目标最相似的地方,那个就是目标了。这个和之前写的模板匹配的原理是差不多的,只是之前模板匹配采用的相似度度量是两个图片的相关性,这里用的是“hash指纹”。另外,详细的描述请参考上面三篇博文,这里先稍微总结下感知哈希算法的实现过程,然后给出自己简单实现目标跟踪的代码。
一、感知哈希算法
1、基于低频的均值哈希
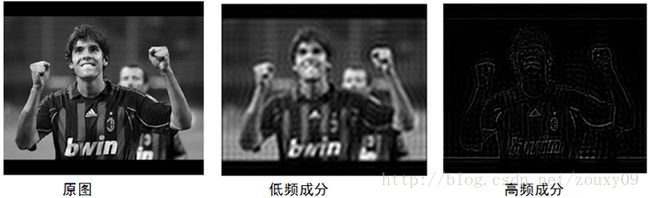
一张图片就是一个二维信号,它包含了不同频率的成分。如下图所示,亮度变化小的区域是低频成分,它描述大范围的信息。而亮度变化剧烈的区域(比如物体的边缘)就是高频的成分,它描述具体的细节。或者说高频可以提供图片详细的信息,而低频可以提供一个框架。
而一张大的,详细的图片有很高的频率,而小图片缺乏图像细节,所以都是低频的。所以我们平时的下采样,也就是缩小图片的过程,实际上是损失高频信息的过程。

均值哈希算法主要是利用图片的低频信息,其工作过程如下:
(1)缩小尺寸:去除高频和细节的最快方法是缩小图片,将图片缩小到8x8的尺寸,总共64个像素。不要保持纵横比,只需将其变成8*8的正方形。这样就可以比较任意大小的图片,摒弃不同尺寸、比例带来的图片差异。
(2)简化色彩:将8*8的小图片转换成灰度图像。
(3)计算平均值:计算所有64个像素的灰度平均值。
(4)比较像素的灰度:将每个像素的灰度,与平均值进行比较。大于或等于平均值,记为1;小于平均值,记为0。
(5)计算hash值:将上一步的比较结果,组合在一起,就构成了一个64位的整数,这就是这张图片的指纹。组合的次序并不重要,只要保证所有图片都采用同样次序就行了。(我设置的是从左到右,从上到下用二进制保存)。
计算一个图片的hash指纹的过程就是这么简单。刚开始的时候觉得这样就损失了图片的很多信息了,居然还能有效。简单的算法也许存在另一种美。如果图片放大或缩小,或改变纵横比,结果值也不会改变。增加或减少亮度或对比度,或改变颜色,对hash值都不会太大的影响。最大的优点:计算速度快!
这时候,比较两个图片的相似性,就是先计算这两张图片的hash指纹,也就是64位0或1值,然后计算不同位的个数(汉明距离)。如果这个值为0,则表示这两张图片非常相似,如果汉明距离小于5,则表示有些不同,但比较相近,如果汉明距离大于10则表明完全不同的图片。
2、增强版:pHash
均值哈希虽然简单,但受均值的影响非常大。例如对图像进行伽马校正或直方图均衡就会影响均值,从而影响最终的hash值。存在一个更健壮的算法叫pHash。它将均值的方法发挥到极致。使用离散余弦变换(DCT)来获取图片的低频成分。
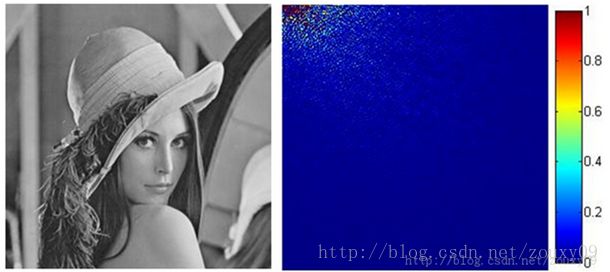
离散余弦变换(DCT)是种图像压缩算法,它将图像从像素域变换到频率域。然后一般图像都存在很多冗余和相关性的,所以转换到频率域之后,只有很少的一部分频率分量的系数才不为0,大部分系数都为0(或者说接近于0)。下图的右图是对lena图进行离散余弦变换(DCT)得到的系数矩阵图。从左上角依次到右下角,频率越来越高,由图可以看到,左上角的值比较大,到右下角的值就很小很小了。换句话说,图像的能量几乎都集中在左上角这个地方的低频系数上面了。
pHash的工作过程如下:
(1)缩小尺寸:pHash以小图片开始,但图片大于8*8,32*32是最好的。这样做的目的是简化了DCT的计算,而不是减小频率。
(2)简化色彩:将图片转化成灰度图像,进一步简化计算量。
(3)计算DCT:计算图片的DCT变换,得到32*32的DCT系数矩阵。
(4)缩小DCT:虽然DCT的结果是32*32大小的矩阵,但我们只要保留左上角的8*8的矩阵,这部分呈现了图片中的最低频率。
(5)计算平均值:如同均值哈希一样,计算DCT的均值。
(6)计算hash值:这是最主要的一步,根据8*8的DCT矩阵,设置0或1的64位的hash值,大于等于DCT均值的设为”1”,小于DCT均值的设为“0”。组合在一起,就构成了一个64位的整数,这就是这张图片的指纹。
结果并不能告诉我们真实性的低频率,只能粗略地告诉我们相对于平均值频率的相对比例。只要图片的整体结构保持不变,hash结果值就不变。能够避免伽马校正或颜色直方图被调整带来的影响。
与均值哈希一样,pHash同样可以用汉明距离来进行比较。(只需要比较每一位对应的位置并算计不同的位的个数)
二、基于感知哈希算法的视觉跟踪
和前面说的那样,对于感知哈希算法的视觉跟踪,思想很简单,我们把要跟踪的目标保存好,计算它的hash码,然后在每一帧来临的时候,我们扫描整个图像,计算每个扫描窗口的hash码,比较它和目标的hash码的汉明距离,汉明距离距离最小的扫描窗口就是和目标最相似的,也就是该帧的目标所在位置。为了加速,我们只在上一帧目标的周围图像区域进行扫描。为了适应目标的变化,我们还需要在成功跟踪后的每一帧更新我们要跟踪的目标。