CUDA图像旋转的实现
CUDA图像旋转的实现
由于最近工作比较忙,有一段时间没写博客了,今天就将以前基于CUDA做的图像旋转的demo奉献给大家。
在网上看到很多图像旋转的博客文章,可以说大部分做的只是图像旋转后还保持原来图像的大小,那么这就带来一个问题,旋转后 图像有一部分内容会造成缺失,所以为了保持图像的完整性,需要确定旋转后图像的大小,即多少行和列。
由于本人主要从事3S方面的研发工作,读取图像我就用GDAL开源库,图像就采用我所熟悉的遥感影像。这里我采用图像绕着图像的中心旋转,那么旋转之后究竟图像有多大,其实很简单,只要求出以图像中心点为坐标原点,求出原始图像四个角点变换之后所在的行列号,然后求出最大和最小坐标就OK了,具体的代码如下:
// 打开原始图像
GDALDataset* poInDs = (GDALDataset*)GDALOpen(pszFileName, GA_ReadOnly);
if (NULL == poInDs)
{
return ;
}
double dbGeonTran[6];
poInDs->GetGeoTransform(dbGeonTran);
//获得原始图像的行数和列数
int nXsize = poInDs->GetRasterXSize();
int nYsize = poInDs->GetRasterYSize();
unsigned char* poDataIn = new unsigned char[nXsize*nYsize];
int n = 1;
poInDs->RasterIO(GF_Read,0,0,nXsize,nYsize,poDataIn,nXsize,nYsize,GDT_Byte,1,&n,0,0,0);
//设置旋转的角度
float fAngle = 45.0;
float sinTheta = sin(fAngle*M_PI/180.0);
float cosTheta = cos(fAngle*M_PI/180.0);
//求出旋转后图像的长和宽
float x0 = nXsize/2.0f;
float y0 = nYsize/2.0f;
float dfPixel[4];
float dfLine[4];
dfPixel[0] = (int) ( cosTheta*(0-x0) + sinTheta*(0-y0) + x0 );
dfLine[0] = (int) ( -sinTheta*(0-x0) + cosTheta*(0-y0) + y0 );
dfPixel[1] = (int) ( cosTheta*(nXsize-1-x0) + sinTheta*(0-y0) + x0 );
dfLine[1] = (int) ( -sinTheta*(nXsize-1-x0) + cosTheta*(0-y0) + y0 );
dfPixel[2] = (int) ( cosTheta*(nXsize-1-x0) + sinTheta*(nYsize-1-y0) + x0 );
dfLine[2] = (int) ( -sinTheta*(nXsize-1-x0) + cosTheta*(nYsize-1-y0) + y0 );
dfPixel[3] = (int) ( cosTheta*(0-x0) + sinTheta*(nYsize-1-y0) + x0 );
dfLine[3] = (int) ( -sinTheta*(0-x0) + cosTheta*(nYsize-1-y0) + y0 );
float fminx = *( std::min_element(dfPixel,dfPixel+4) );
float fmaxx = *( std::max_element(dfPixel,dfPixel+4) );
float fminy = *( std::min_element(dfLine,dfLine+4) );
float fmaxy = *( std::max_element(dfLine,dfLine+4) );
int nNewXsize = int(fmaxx-fminx);
int nNewYsize = int(fmaxy-fminy);这样,上面代码中nNewXsize和nNewYsize就是求出来的图像大小,然后分配内存,读取原始图像,我这里只拿第一个波段以及8位的数据作为实验。到这里数据都准备好了,下面只管往显卡里面送数据,图像旋转可以借助点的旋转公式解决,可以参考我的博客 二维图形旋转公式的推导,其中核心的GPU内核函数如下:
__global__ void ImageRotate_kernel(unsigned char* poDataIn,
unsigned char* poDataOut,
int nWidth,
int nHeight,
int nNewWidth,
int nNewHeight,
float sinTheta,
float cosTheta)
{
int idy = blockIdx.y*blockDim.y + threadIdx.y; //行
int idx = blockIdx.x*blockDim.x + threadIdx.x; //列
float x0 = nNewWidth/2.0f;
float y0 = nNewHeight/2.0f;
float x1 = nWidth/2.0f;
float y1 = nHeight/2.0f;
//求出idx,idy所在原始图像上的坐标
int x2 = (int) ( cosTheta*(idx-x0) + sinTheta*(idy-y0) + x0 );
int y2 = (int) ( -sinTheta*(idx-x0) + cosTheta*(idy-y0) + y0 );
//还要减去偏移量
x2 -= (x0-x1);
y2 -= (y0-y1);
if (idx < nNewWidth && idy < nNewHeight)
{
if (x2 < 0 || x2 >= nWidth || y2 < 0 || y2 >= nHeight)
{
poDataOut[ idy*nNewWidth + idx] = 0;
}
else
{
poDataOut[ idy*nNewWidth + idx] = poDataIn[y2*nWidth + x2];
}
}
}
上面函数中poDataOut变量就存储计算好的新图像的数据,然后将结果拷贝到主机端,再写回到文件。当然,这中间还需要一个中间的函数,用来启动CUDA设备,调用核函数以及主机端和GPU设备端数据的来回拷贝,该函数如下:
void ImageRotateCUDA(unsigned char* poDataIn,
unsigned char* poDataOut,
int nWidth,
int nHeight,
int nNewWidth,
int nNewHeight,
float sinTheta,
float cosTheta)
{
unsigned char* poDataIn_d = NULL;
cudaMalloc(&poDataIn_d,nWidth*nHeight*sizeof(unsigned char));
cudaMemcpy(poDataIn_d,poDataIn,nWidth*nHeight*sizeof(unsigned char),cudaMemcpyHostToDevice);
unsigned char* poDataOut_d = NULL;
cudaMalloc(&poDataOut_d,nNewWidth*nNewHeight*sizeof(unsigned char));
//调用核函数
dim3 dimBlock(32,32,1);
dim3 dimGrid(ceil(nNewWidth/32.0),ceil(nNewHeight/32.0),1);
ImageRotate_kernel<<<dimGrid,dimBlock>>>(
poDataIn_d,poDataOut_d,nWidth,nHeight,nNewWidth,nNewHeight,sinTheta,cosTheta);
cudaMemcpy(poDataOut,poDataOut_d,nNewWidth*nNewHeight*sizeof(unsigned char),cudaMemcpyDeviceToHost);
//释放显卡显存
cudaFree(poDataOut_d);
cudaFree(poDataOut_d);
}
下面的图像时原始图像:
旋转后的图像如下:
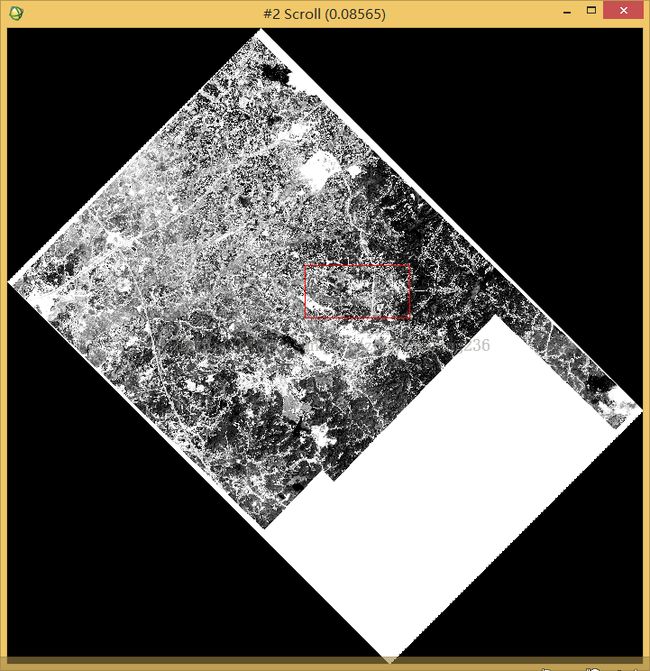
可能有些读者有些疑问,为什么旋转45度后成了这个样子,那是因为在遥感中图像一般都是以左上角为原点,如果你不习惯,可以自己画一个坐标系,然后上下颠倒看就明白了。
当然,这个只是一个简单的demo,如果图像非常大,那么就需要分块来做。这样就不会导致程序崩溃。