OpenCV_基于HOG特征的行人检测
OpenCV中提供了HOG的行人检测(pedestrain detection)类。
cv::HOGDescriptor类的构造函数的各参数的定义:
CV_WRAP HOGDescriptor() :
winSize(64,128), // detect window
blockSize(16,16), // block 大小
blockStride(8,8), // overlap block的滑动步长
cellSize(8,8), // cell 大小
nbins(9), // 直方图的bin个数
derivAperture(1), // 微分算子核
winSigma(-1), // 在window上进行高斯加权
histogramNormType(HOGDescriptor::L2Hys), // 直方图归一化类型
L2HysThreshold(0.2), // L2-norm followed by clipping (limiting the maximum values of v to 0.2) and renormalising
gammaCorrection(true), // Gamma校正,去除光照影响
nlevels(HOGDescriptor::DEFAULT_NLEVELS) // 分层数
下面的两段代码采用OpenCV中的HOG行人检测类来完成对静态图片中的行人检测。
1)采用64*128 (像素为单位)的detect window
// 基于HOG特征的行人检测
// Author:www.icvpr.com
// Blog: http://blog.csdn.net/icvpr
#include <iostream>
#include <opencv2/opencv.hpp>
int main(int argc, char** argv)
{
cv::Mat image = cv::imread("test.bmp");
if (image.empty())
{
std::cout<<"read image failed"<<std::endl;
}
// 1. 定义HOG对象
cv::HOGDescriptor hog; // 采用默认参数
// 2. 设置SVM分类器
hog.setSVMDetector(cv::HOGDescriptor::getDefaultPeopleDetector()); // 采用已经训练好的行人检测分类器
// 3. 在测试图像上检测行人区域
std::vector<cv::Rect> regions;
hog.detectMultiScale(image, regions, 0, cv::Size(8,8), cv::Size(32,32), 1.05, 1);
// 显示
for (size_t i = 0; i < regions.size(); i++)
{
cv::rectangle(image, regions[i], cv::Scalar(0,0,255), 2);
}
cv::imshow("hog", image);
cv::waitKey(0);
return 0;
}
2)采用48*96(像素为单位)的detect window
// 基于HOG特征的行人检测
// Author: http://blog.csdn.net/icvpr
#include <iostream>
#include <opencv2/opencv.hpp>
int main(int argc, char** argv)
{
cv::Mat image = cv::imread("test.bmp");
if (image.empty())
{
std::cout<<"read image failed"<<std::endl;
}
// 1. 定义HOG对象
cv::HOGDescriptor hog(cv::Size(48, 96), cv::Size(16, 16), cv::Size(8, 8), cv::Size(8, 8), 9, 1,-1, cv::HOGDescriptor::L2Hys, 0.2, true, cv::HOGDescriptor::DEFAULT_NLEVELS);
// 2. 设置SVM分类器
hog.setSVMDetector(cv::HOGDescriptor::getDaimlerPeopleDetector()); // 采用已经训练好的行人检测分类器
// 3. 在测试图像上检测行人区域
std::vector<cv::Rect> regions;
hog.detectMultiScale(image, regions, 0, cv::Size(8,8), cv::Size(32,32), 1.05, 1);
// 显示
for (size_t i = 0; i < regions.size(); i++)
{
cv::rectangle(image, regions[i], cv::Scalar(0,0,255), 2);
}
cv::imshow("hog", image);
cv::waitKey(0);
return 0;
}
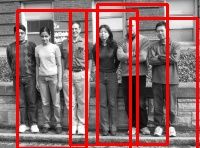
行人检测实验结果:

相关内容:www.icvpr.com
--------------------------------------------------------
< 转载请注明:http://blog.csdn.net/icvpr >