【图像算法】彩色图像分割专题三:边缘检测+区域生长 法
【图像算法】彩色图像分割专题三:边缘检测+区域生长法
SkySeraph May 15th 2011 HQU
Email:zgzhaobo@gmail.com QQ:452728574
Latest Modified Date:May 15th 2011 HQU
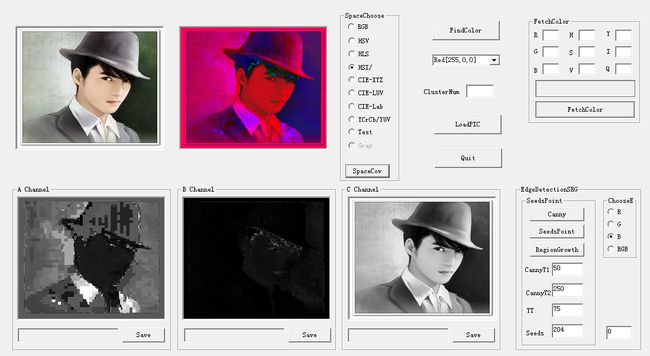
一 原理:
空间转换:RGB转换为HSI http://www.cnblogs.com/skyseraph/archive/2011/05/03/2035643.html,结果见实现图1
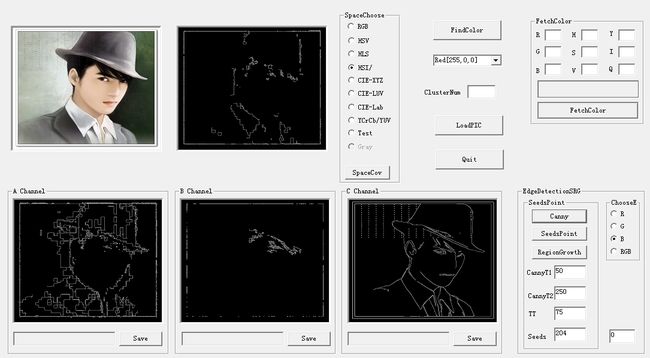
边缘检测:在HSI空间,对HSI、H、S、I分别利用Canny进行边缘检测,结果见实现图2
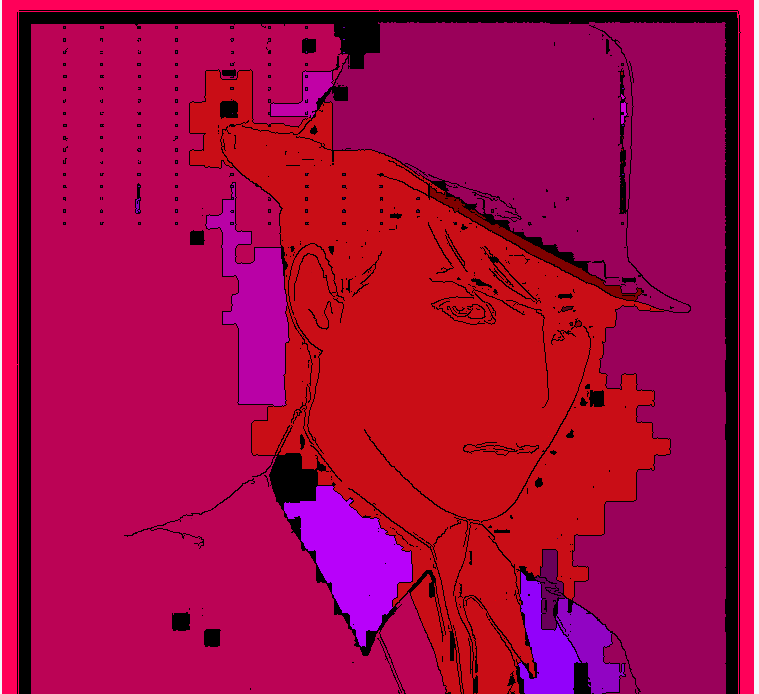
区域生长:首先对边缘检测的图像沿边界进行质心计算,把求的的质心作为种子点;区域生长采用四领域像素聚类。
二 源码:
空间转换:http://www.cnblogs.com/skyseraph/archive/2011/05/05/2038317.html
边缘检测:
1
////////////////////////////////////////////////////////////////////////
//
2
//
寻找种子点(边缘检测法)
3
////////////////////////////////////////////////////////////////////////
//
4
void
CColorSegDlg::OnCanny()
5
//
Canny边缘检测
6
{
7
//
验证
8
if
(
!
(ToDisplayCtr1))
9
{
10
MessageBox(
"
Please Load Pic!
"
);
11
return
;
12
}
13
14
if
(
!
(ToDisplayCtr2
&&
ToDisplayCtr3
&&
ToDisplayCtr4
&&
ToDisplayCtr5))
15
{
16
MessageBox(
"
Please do SpaceConvetion!
"
);
17
return
;
18
}
19
20
UpdateData(TRUE);
21
int
CANNY_T1,CANNY_T2;
//
canny算子双阈值
22
CANNY_T1
=
m_CannyT1;
23
CANNY_T2
=
m_CannyT2;
24
25
//
边缘检测图像的 "初始化"
26
ToDisplayCtr2Ed
=
cvCreateImage(cvGetSize(TheImage),IPL_DEPTH_8U,
1
);
27
ToDisplayCtr3Ed
=
cvCreateImage(cvGetSize(TheImage),IPL_DEPTH_8U,
1
);
28
ToDisplayCtr4Ed
=
cvCreateImage(cvGetSize(TheImage),IPL_DEPTH_8U,
1
);
29
ToDisplayCtr5Ed
=
cvCreateImage(cvGetSize(TheImage),IPL_DEPTH_8U,
1
);
30
31
/////////
/对各通道分量
32
//
定义工作位图并加载
33
IplImage
*
a;
34
a
=
ToDisplayCtr3;
35
IplImage
*
b;
36
b
=
ToDisplayCtr4;
37
IplImage
*
c;
38
c
=
ToDisplayCtr5;
39
40
//
定义辅助位图,描述边缘检测后图像
41
IplImage
*
aCanny
=
cvCreateImage(cvGetSize(a),IPL_DEPTH_8U,
1
);
42
IplImage
*
bCanny
=
cvCreateImage(cvGetSize(b),IPL_DEPTH_8U,
1
);
43
IplImage
*
cCanny
=
cvCreateImage(cvGetSize(c),IPL_DEPTH_8U,
1
);
44
45
//
Canny边缘检测
46
//
cvSobel(a,aCanny,1,0,3);
//
水平sobel核
47
cvCanny(a, aCanny, CANNY_T1, CANNY_T2);
//
阈值选择!
48
cvCanny(b, bCanny, CANNY_T1, CANNY_T2);
49
cvCanny(c, cCanny, CANNY_T1, CANNY_T2);
50
51
//
输出并显示
52
//
imageReplace(aCanny,&ToDisplayCtr3);
53
//
imageReplace(bCanny,&ToDisplayCtr4);
54
//
imageReplace(cCanny,&ToDisplayCtr5);
55
56
cvCopyImage(aCanny,ToDisplayCtr3Ed);
//
输出处理结果
57
cvCopyImage(bCanny,ToDisplayCtr4Ed);
58
cvCopyImage(cCanny,ToDisplayCtr5Ed);
59
60
DrawPicToHDC(ToDisplayCtr3Ed,IDC_ImgShowCtrl3);
//
显示
61
DrawPicToHDC(ToDisplayCtr4Ed,IDC_ImgShowCtrl4);
62
DrawPicToHDC(ToDisplayCtr5Ed,IDC_ImgShowCtrl5);
63
64
//
释放资源
65
cvReleaseImage(
&
aCanny);
66
cvReleaseImage(
&
bCanny);
67
cvReleaseImage(
&
cCanny);
68
69
70
/////////
/对**空间图像
71
///
*
72
//
定义工作位图并加载
73
IplImage
*
dstColor;
74
dstColor
=
ToDisplayCtr2;
75
IplImage
*
dstGray
=
cvCreateImage(cvGetSize(dstColor),IPL_DEPTH_8U,
1
);
//
cvCanny只接受单通道图像作为输入
76
cvCvtColor(dstColor,dstGray,CV_RGB2GRAY);
77
78
//
定义辅助位图,描述边缘检测后图像
79
IplImage
*
dstCannyGray
=
cvCreateImage(cvGetSize(dstGray),IPL_DEPTH_8U,
1
);
//
cvCanny只接受单通道图像作为输入
80
81
//
Canny边缘检测
82
cvCanny(dstGray,dstCannyGray,CANNY_T1,CANNY_T2);
83
84
//
输出并显示
85
cvCopyImage(dstCannyGray,ToDisplayCtr2Ed);
86
DrawPicToHDC(ToDisplayCtr2Ed,IDC_ImgShowCtrl2);
87
88
cvReleaseImage(
&
dstGray);
89
cvReleaseImage(
&
dstCannyGray);
90
//
*/
91
92
}
93
94
void
CColorSegDlg::OnSeedsPoint()
95
{
96
//
验证
97
if
(
!
(ToDisplayCtr1))
98
{
99
MessageBox(
"
Please Load Pic!
"
);
100
return
;
101
}
102
103
if
(
!
(ToDisplayCtr2
&&
ToDisplayCtr3
&&
ToDisplayCtr4
&&
ToDisplayCtr5))
104
{
105
MessageBox(
"
Please do SpaceConvetion!
"
);
106
return
;
107
}
108
109
UpdateData(TRUE);
110
111
long
seedNum
=
0
;
//
种子点数
112
seed_Header
=
(seed_Node
*
)malloc(
sizeof
(seed_Node));
//
种子点,链表存贮
113
114
//
定义工作位图
115
IplImage
*
src ;
116
IplImage
*
srcCanny;
117
src
=
ToDisplayCtr2;
118
119
if
(m_RGB
==
0
)
//
R
120
{
121
//
src = ToDisplayCtr3;
122
srcCanny
=
ToDisplayCtr3Ed;
123
}
124
125
if
(m_RGB
==
1
)
//
G
126
{
127
//
src = ToDisplayCtr4;
128
srcCanny
=
ToDisplayCtr4Ed;
129
}
130
131
if
(m_RGB
==
2
)
//
B
132
{
133
//
src = ToDisplayCtr5;
134
srcCanny
=
ToDisplayCtr5Ed;
135
}
136
137
if
(m_RGB
==
3
)
//
RGB
138
{
139
//
src = ToDisplayCtr2;
140
srcCanny
=
ToDisplayCtr2Ed;
141
}
142
143
//
验证
144
if
(
!
src
&&
!
srcCanny)
145
{
146
MessageBox(
"
wrong!
"
);
147
return
;
148
}
149
150
//
定义辅助位图
151
IplImage
*
dst
=
NULL;
152
IplImage
*
dstCanny
=
NULL;
153
154
dst
=
cvCreateImage(cvGetSize(src),IPL_DEPTH_8U,
3
);
155
dstCanny
=
cvCreateImage(cvGetSize(srcCanny),IPL_DEPTH_8U,
1
);
156
/*
157
if(m_RGB == 3)
158
{
159
dst = cvCreateImage(cvGetSize(src),IPL_DEPTH_8U,3);
160
dstCanny = cvCreateImage(cvGetSize(srcCanny),IPL_DEPTH_8U,1);
161
}
162
else
163
{
164
dst = cvCreateImage(cvGetSize(src),IPL_DEPTH_8U,1);
165
dstCanny = cvCreateImage(cvGetSize(srcCanny),IPL_DEPTH_8U,1);
166
}
*/
167
168
cvCopyImage(src,dst);
169
cvCopyImage(srcCanny,dstCanny);
170
//
dst = src;
171
//
dstCanny = srcCanny;
172
173
//
寻找种子点
174
findSeed(dst,dstCanny,seed_Header,seedNum);
175
176
//
cout<<seedNum<<endl;
177
m_SeedsPoint
=
seedNum;
178
UpdateData(FALSE);
179
180
cvReleaseImage(
&
dst);
181
cvReleaseImage(
&
dstCanny);
182
}
183
184
//
函数模块
185
//
-----------------------------------------------
//
186
//
功能:寻找区域生长种子点
187
//
参数:dst 转换为**空间(如HSI)的彩色图像
188
//
bundary 寻找的区域:hsi经canny边缘检测后的图像
189
//
seed 种子点,链表存贮
190
//
seedNUM 种子点数
191
//
返回:
192
//
-----------------------------------------------
//
193
void
CColorSegDlg::findSeed(IplImage
*
dst, IplImage
*
bundary, seed_Node
*
seed,
long
&
seedNUM)
194
//
寻找种子点
195
{
196
int
width
=
bundary
->
width;
197
int
height
=
bundary
->
height;
198
bool
*
flag
=
(
bool
*
)malloc(
sizeof
(
bool
)
*
width
*
height);
//
像素访问标记
199
bool
first
=
true
;
200
201
memset(flag,
0
,
sizeof
(
bool
)
*
width
*
height);
202
seedNUM
=
0
;
203
seed_Node
*
seed_t
=
seed;
204
205
for
(
int
row
=
0
; row
<
height; row
++
)
//
列
206
for
(
int
col
=
0
; col
<
width; col
++
)
207
{
208
if
(((uchar
*
)(bundary
->
imageData
+
209
row
*
bundary
->
widthStep))[col
*
bundary
->
nChannels]
==
0
)
//
像素值==0
210
continue
;
211
if
(flag[row
*
width
+
col])
//
已经访问过该点
212
continue
;
213
int
X
=
0
, Y
=
0
, num
=
0
;
214
findBundary(bundary, flag, col, row, X, Y, num);
//
得到区域重心
215
if
(first)
216
{
217
first
=
false
;
218
}
219
else
220
{
221
seed_t
->
next
=
(seed_Node
*
)malloc(
sizeof
(seed_Node));
222
seed_t
=
seed_t
->
next;
223
}
224
seed_t
->
x
=
X
/
num;
//
增加新种子:质心/重心
225
seed_t
->
y
=
Y
/
num;
226
seed_t
->
next
=
NULL;
227
228
seed_t
->
I
=
((uchar
*
)(dst
->
imageData
+
dst
->
widthStep
*
row))[col
*
dst
->
nChannels];
//
修改!
229
seed_t
->
J
=
((uchar
*
)(dst
->
imageData
+
dst
->
widthStep
*
row))[col
*
dst
->
nChannels
+
1
];
230
seed_t
->
K
=
((uchar
*
)(dst
->
imageData
+
dst
->
widthStep
*
row))[col
*
dst
->
nChannels
+
2
];
231
seed_t
->
seedID
=
++
seedNUM;
//
种子点数加一
232
//
segment[bundary->width*seed_t->y + seed_t->x] = seed_t->seedID;
233
}
234
235
free(flag);
236
}
237
238
//
-----------------------------------------------
//
239
//
功能:沿边界递归寻找,计算区域重心/质心
240
//
参数:bundary寻找的区域
241
//
flag 像素访问标记
242
//
x/y 区域中的某点
243
//
X/Y 质心/重心
244
//
num 边界连接的像素数
245
//
-----------------------------------------------
//
246
void
CColorSegDlg::findBundary(IplImage
*
bundary,
bool
*
flag,
int
x,
int
y
247
,
int
&
X,
int
&
Y,
int
&
num)
248
//
获取区域重心
249
{
250
if
(flag[y
*
bundary
->
width
+
x])
//
像素已访问
251
return
;
252
if
(((uchar
*
)(bundary
->
imageData
+
y
*
bundary
->
widthStep))[x
*
bundary
->
nChannels]
==
0
)
253
return
;
254
flag[y
*
bundary
->
width
+
x]
=
true
;
//
标记访问
255
X
+=
x;
//
质心X方向累加
256
Y
+=
y;
257
num
++
;
//
边界连接的像素数加
258
for
(
int
i
=-
1
; i
<
2
; i
++
)
259
for
(
int
j
=-
1
; j
<
2
; j
++
)
//
八点领域扩散
260
{
261
if
(
!
i
&&
!
j)
continue
;
262
if
(x
+
j
<
0
||
x
+
j
>=
bundary
->
width
||
y
+
i
<
0
||
y
+
i
>=
bundary
->
height)
263
continue
;
264
findBundary(bundary, flag, x
+
j, y
+
i, X, Y, num);
//
继续寻找
265
}
266
}
区域生长:
//////////////////////////////////////////////////////////////////////////
// 区域生长(基于边缘检测提取种子点)
//////////////////////////////////////////////////////////////////////////
// 区域生长
void CColorSegDlg::OnEdgeRegionGrowth() //消息响应
{
// 验证
if(!(ToDisplayCtr1))
{
MessageBox("Please Load Pic!");
return;
}
if(!(ToDisplayCtr2 && ToDisplayCtr3 && ToDisplayCtr4 && ToDisplayCtr5))
{
MessageBox("Please do SpaceConvetion!");
return;
}
// 定义工作位图
IplImage* src ;
IplImage* srcCanny;
src = ToDisplayCtr2;
// 判断
UpdateData(TRUE);
if(m_RGB == 0) //R
{
//src = ToDisplayCtr3;
srcCanny = ToDisplayCtr3Ed;
}
if(m_RGB == 1) //G
{
//src = ToDisplayCtr4;
srcCanny = ToDisplayCtr4Ed;
}
if(m_RGB == 2) //B
{
//src = ToDisplayCtr5;
srcCanny = ToDisplayCtr5Ed;
}
if(m_RGB == 3)//RGB
{
//src = ToDisplayCtr2;
srcCanny = ToDisplayCtr2Ed;
}
// 验证
if(!src && ! srcCanny)
{
MessageBox("wrong!");
return;
}
// 定义辅助位图
IplImage* dst = NULL;
IplImage* dstCanny = NULL;
dst = cvCreateImage(cvGetSize(src),IPL_DEPTH_8U,3);
dstCanny = cvCreateImage(cvGetSize(srcCanny),IPL_DEPTH_8U,1);
cvCopyImage(src,dst);
cvCopyImage(srcCanny,dstCanny);
// 为分割结果申请空间
int width = TheImage->width;
int height = TheImage->height;
segment = (long *)malloc(sizeof(long)*width*height);
memset(segment, 0, sizeof(long)*width*height);
int TT;
UpdateData(TRUE);
TT = m_TT;
// 区域生长
seed_Node *t_Node = seed_Header;
while(t_Node) //基于种子点的区域生长
{
regionGrowing(dst, dstCanny, t_Node, t_Node->x, t_Node->y, TT);
t_Node = t_Node->next;
}
//////////分割结果
// SegResultImg "初始化"
SegResultImg = cvCreateImage(cvGetSize(TheImage),IPL_DEPTH_8U,3);
// 定义工作位图
IplImage* SegResultsrc;
SegResultsrc = SegResultImg;
// 定义辅助位图
IplImage* SegResultdst = cvCreateImage(cvGetSize(SegResultsrc),IPL_DEPTH_8U,3);
IplImage* SegResultdstRGB = cvCreateImage(cvGetSize(SegResultsrc),IPL_DEPTH_8U,3);
//print_segment(width, height);
copy_segment(SegResultdst, seed_Header);
//HSI2RGB(SegResultdst);
//cvCvtColor(SegResultdst,SegResultdstRGB,CV_HSV2BGR);
cvCopyImage(SegResultdst,SegResultImg);
// cvNamedWindow("SegResultdstRGB result");
// cvShowImage("SegResultdstRGB result", SegResultdstRGB);
cvNamedWindow("SegResultdst result");
cvShowImage("SegResultdst result", SegResultdst);
//cvSaveImage("res.bmp", SegResultImg);
cvDestroyWindow("segmentation result");
cvReleaseImage(&dst);
cvReleaseImage(&dstCanny);
}
//-----------------------------------------------//
uchar CColorSegDlg::color_distance(uchar h1, uchar h2)
// 计算颜色距离
{
if(h1<h2)
return h2 - h1;
return h1 - h2;
}
//-----------------------------------------------//
//功能:区域生长
//参数:dst 转换为**空间(如HSI)的彩色图像
// bundary 区域:HSI经canny边缘检测后的图像
// seed 链表存贮的种子点
// xi/yi 种子点坐标
// T 相似性准则判断 的阈值
//返回:
//-----------------------------------------------//
void CColorSegDlg::regionGrowing(IplImage *dst, IplImage *bundary, seed_Node *seed, int xi, int yi, uchar T)
// 区域生长
{
int sp = 0; //栈顶指针
int width = dst->width;
int height = dst->height;
//int stuck[100];
int *stuck = (int *)malloc(sizeof(int)*width*height*2);//分配堆栈空间,存储种子点坐标
memset(stuck, 0, sizeof(int)*width*height*2);
stuck[sp++] = xi;
stuck[sp++] = yi;
while(sp)
{
int y = stuck[--sp];//取出栈顶元素
int x = stuck[--sp];
//if(segment[bundary->width*y + x]!=0 )
// continue;
//
uchar a1 = ((uchar *)(dst->imageData + y*dst->widthStep))[dst->nChannels*x];
uchar b1 = ((uchar *)(dst->imageData + y*dst->widthStep))[dst->nChannels*x+1];
uchar c1 = ((uchar *)(dst->imageData + y*dst->widthStep))[dst->nChannels*x+2];
//
uchar a2 = ((uchar *)(dst->imageData +
seed->y*dst->widthStep))[dst->nChannels*seed->x];
uchar b2 = ((uchar *)(dst->imageData +
seed->y*dst->widthStep))[dst->nChannels*seed->x+1];
uchar c2 = ((uchar *)(dst->imageData +
seed->y*dst->widthStep))[dst->nChannels*seed->x+2];
// 判断两像素是否属于同一区域
if(color_distance(a1, a2) > T)
continue;
segment[bundary->width*y + x] = seed->seedID;
// 重新计算区域颜色
/*seed->I /= 2;
seed->I += a1/2;
seed->J /= 2;
seed->J += b1/2;
seed->K /= 2;
seed->K += c1/2;*/
seed->I = a2;
seed->J = b2;
seed->K = c2;
for(int i=-1; i<2; i++)
for(int j=-1; j<2; j++) //对四点领域做扩散
{
if((i==-1&&j==-1) || (i==-1&&j==1) || (i==1&&j==-1) || (i==1&&j==1))//4领域
continue;
if(i+y<0 || i+y>=dst->height || j+x<0 || j+x>=dst->width)
continue;
if(segment[bundary->width*(y+i) + x + j]!=0 )
continue;
if(((uchar*)(bundary->imageData+bundary->widthStep*(y+i)))[bundary->nChannels*(x+j)] == 255)
//到达边界,结束该方向的生长
continue;
stuck[sp++] = x+j;//新种子点入栈
stuck[sp++] = y+i;
segment[bundary->width*(y+i) + x + j] = -1;
}
}
free(stuck);
}
//-----------------------------------------------//
void CColorSegDlg::copy_segment(IplImage *pSeg, seed_Node *node)
// 生成分割图
{
int width = pSeg->width;
int height = pSeg->height;
for(int row=0; row<height; row++)
for(int col=0; col<width; col++)
{
long id = segment[width*row+col];
seed_Node *t_node = node;
uchar I, J, K;
while(t_node)
{
if(t_node->seedID == id) //遍历确定像素所属的区域
{
I = t_node->I; //分配像素颜色值
J = t_node->J;
K = t_node->K;
break;
}
t_node = t_node->next;
}
if(!t_node)
continue;
((uchar *)(pSeg->imageData+row*pSeg->widthStep))[col*pSeg->nChannels] = I;
((uchar *)(pSeg->imageData+row*pSeg->widthStep))[col*pSeg->nChannels+1] = J;
((uchar *)(pSeg->imageData+row*pSeg->widthStep))[col*pSeg->nChannels+2] = K;
}
}
void CColorSegDlg::print_segment(int width, int height)
{
for(int row=0; row<height; row++)
{
for(int col=0; col<width; col++)
{
//printf("%ld ", segment[width*row + col]);
m_Test = segment[width*row + col];
UpdateData(false);
}
//printf("\n");
}
}
//////////////////////////////////////////////////////////////////////////
三 实现:
空间转换
边缘检测
提取种子点后区域生长结果
Author: SKySeraph
Email/GTalk: zgzhaobo@gmail.com QQ:452728574
From: http://www.cnblogs.com/skyseraph/
本文版权归作者和博客园共有,欢迎转载,但未经作者同意必须保留此段声明,且在文章页面明显位置给出原文连接,请尊重作者的劳动成果