RTT下spi flash+elm fat文件系统移植小记
背景:
- MCU:STM32F207
- SPI flash: Winbond W25Q16BV
- OS: RTT V1.1.1
- bsp: STM32F20x
1 将spi_core.c,spi_dev.c及spi.h三个文件加入工程
spi_core.c,spi_dev.c这两个文件位于RTT\components\drivers\spi目录下,而spi.h头文件位于RTT\\components\drivers\include\drivers目录下.
可在MKD工程的Drivers组下将上面两个源文件加进行,并将spi.h头文件所在目录添加到工程的include path下.
spi_core.c文件实现了spi的抽象操作,如注册spi总线(spi_bus),向SPI总线添加设备函数等.
注: 这里将MCU的一路spi外设虚拟成spi总线,然后总线上可以挂很多spi设备(spi_device),很个spi_device有一个片选cs.
spi总线和spi设备要在RTT中可以生效就必须先向RTT注册,因此就需要使用上面的注册SPI总线函数和向SPI总线中添加SPI设备.
spi_core.c还包含了配置SPI函数,发送和接收等通信函数,占用和释放SPI总线函数及选择SPI设备函数.这些函数都是抽象出来的,反映出SPI总线上的一些常规操作.真正执行这些操作的过程并不在spi_core.c源文件中,实际上,这些操作信息都是通过注册SPI总线和向总线添加SPI设备时这些操作集就已经"注册"下来了,真正操作时是通过注册信息内的操作函数去实现,也可以说是一种回调操作.
而spi_dev.c实现了SPI设备的一些抽象操作,比如读,写,打开,关闭,初始化等,当然当MCU操作SPI设备的时候,是需要通过SPI总线与SPI设备进行通信的,既然通信就必然会有SPI通信协议,但是通信协议并不在这里具体,spi_dev.c这里还只是SPI设备的抽象操作而已,它只是简单地调用spi_core.c源文件中的抽象通信而已,具体实现还是要靠上层通过SPI总线或SPI设备注册下来的信息而实现的.
在确保了spi_core.c,spi_dev.c和spi.h这三个源文件在MDK工程内之后,接着往下走.
2 添加stm32f20x_40x_spi.c及其对应头文件
将stm32f20x_40x_spi.c添加到Drivers组内.这个stm32f20x_40x_spi.c要在realtouch源码工程里找来,在文件系统示例代码中有.
在源文件在spi.h的基础上根据STM32F20x这款MCU的特点进行了进一步封装.这里修改的地方只有一处理:
即在config函数内配置SPI最大时钟时可根据MCU的具体特性配置为:30000000;
//#ifdef STM32F4XX
// stm32_spi_max_clock = 37500000;
//#elif STM32F2XX
stm32_spi_max_clock = 30000000;
//#endif
3 添加spi_flash_w25qxx.c进工程
由于这里使用的FLASH是Winbond的W25Q16BV,所以以此文件命名,此源文件及其头文件可以在realtouch的源文件中找到.realtouch工程正好也是使用的此flash.
顾名思义,此源文件正是针对w25q16这款芯片的特点来实现的,当然包含
在这里,具体实现了SPI通信的参数,这些参数传递给stm32f20x_4-x_spi.c文件中定义的函数,然后再进一步传递给spi_core来进行通信,spi_core的通信过程又会回调回来.
spi_flash_w25qxx.c还实现了read.write,open,close这些标准操作,这些函数就封装到一个结构体中通信注册函数注册到spi_core内部以供其回调所用.同时spi_flash_w25qxx.c还传递操作所必要的参数下去.
4 初始化 spi flash
接下来就是在RTT系统初始化时对SPI FLASH做些必要的初始化.
如下:
#ifdef RT_USING_SPI
rt_hw_spi2_init();
#ifdef RT_USING_DFS
w25qxx_init("flash0", "spi20");
#endif /* RT_USING_DFS */
rt_hw_spi2_int()函数的作用是向RTT设备管理系统注册SPI2总线和向SPI2总线添加spi设备及其必要的IO管脚初始化. 这里仅仅只是注册设备而已.
w25qxx_init的作用是将SPI2总线上的SPI设备spi20注册成FLASH设备,也就是说将之前的设备告诉RTT其实是FLASH存储设备,然后配上相关的SPI FLASH存储设备参数.
在w25qxx_init函数内会读取spi flash的device id, 这里得根据自己所使用的具体FLASH进行修改.
rt_hw_spi_init函数如下:
这里PB12用作SPI FLASH的片选管脚.
static void rt_hw_spi2_init(void)
{
/* register spi bus */
{
static struct stm32_spi_bus stm32_spi;
GPIO_InitTypeDef GPIO_InitStructure;
RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOB, ENABLE);
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF;
GPIO_InitStructure.GPIO_OType = GPIO_OType_PP;
GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_UP;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
/*!< SPI SCK pin configuration */
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_13 | GPIO_Pin_14 | GPIO_Pin_15;
GPIO_Init(GPIOB, &GPIO_InitStructure);
/* Connect alternate function */
GPIO_PinAFConfig(GPIOB, GPIO_PinSource13, GPIO_AF_SPI2);
GPIO_PinAFConfig(GPIOB, GPIO_PinSource14, GPIO_AF_SPI2);
GPIO_PinAFConfig(GPIOB, GPIO_PinSource15, GPIO_AF_SPI2);
stm32_spi_register(SPI2, &stm32_spi, "spi2");
}
/* attach cs */
{
static struct rt_spi_device spi_device;
static struct stm32_spi_cs spi_cs;
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_OUT;
GPIO_InitStructure.GPIO_OType = GPIO_OType_PP;
GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_UP;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
/* spi21: PB12 */
spi_cs.GPIOx = GPIOB;
spi_cs.GPIO_Pin = GPIO_Pin_12;
RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOB, ENABLE);
GPIO_InitStructure.GPIO_Pin = spi_cs.GPIO_Pin;
GPIO_SetBits(spi_cs.GPIOx, spi_cs.GPIO_Pin);
GPIO_Init(spi_cs.GPIOx, &GPIO_InitStructure);
rt_spi_bus_attach_device(&spi_device, "spi20", "spi2", (void*)&spi_cs);
}
}
注:在rt_config.h头文件中得将#define RT_USING_SPI宏打开.
5 移植ELM FAT文件系统
ELM FAT一般用不着移植,MDK工程中一般默认就有,如果没有就得自己添加了,一般包含6个C文件:
ff.c,dfs_elm.c,dfs.c,dfs_file.c,dfs_fs.c,dfs_posix.c,这些源文件在RTT\components\dfs目录下可以找到,一般不需要修改.
但是在rtconfig.h头文件中针对ELM需要做些修改,如下:
/* SECTION: device filesystem */ #define RT_USING_DFS #define RT_USING_DFS_ELMFAT #define RT_DFS_ELM_REENTRANT #define RT_DFS_ELM_WORD_ACCESS #define RT_DFS_ELM_DRIVES 1 #define RT_DFS_ELM_USE_LFN 0 //这里一般设置为0,不使用长文件名,否则需要加入另外的源文件才能编译通过 #define RT_DFS_ELM_MAX_LFN 255 #define RT_DFS_ELM_MAX_SECTOR_SIZE 4096 //这里一定要与实际的spi flash一个扇区所包含的字节数相符,太小了会出现内存非法覆盖的情况 /* the max number of mounted filesystem */ #define DFS_FILESYSTEMS_MAX 2 /* the max number of opened files */ #define DFS_FD_MAX 4
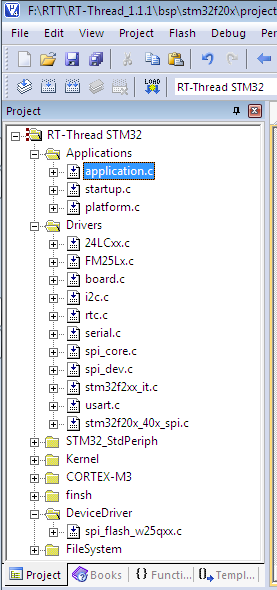
此时附上MDK工程示图如下:
6 初始化文件系统及挂载文件系统
/* Filesystem Initialization */
#ifdef RT_USING_DFS
{
/* init the device filesystem */
dfs_init();
#ifdef RT_USING_DFS_ELMFAT
/* init the elm chan FatFs filesystam*/
elm_init();
/* mount sd card fat partition 1 as root directory */
if (dfs_mount("flash0", "/", "elm", 0, 0) == 0)
{
rt_kprintf("flash0 mount to /.\n");
}
else
rt_kprintf("flash0 mount to / failed.\n");
#endif
}
#endif
7 格式化spi flash
烧录进MCU,首次时SPI FLASH是未格式化的,因此会挂载出错,此时可以在finish下使用mkfs来格式化FLASH,然后使用mkdir来创建一个目录,再使用ls指令来查看创建的目录是否存在,如果存在,则说明正常了.如下图:

通过这一步就说明SPI FLASH能正常工作了.
下面通过代码来测试.
8 通过代码来测试打开读写文件系统
在工程中加入如下测试代码:
{
//文件系统测试代码
int fd=0;
fd =open("/myfile.txt",DFS_O_CREAT|DFS_O_RDWR,0);
if(fd <0)
{
rt_kprintf("open file failed!\r\n");
}
else
{
int count =write(fd,"123456",7);
char buf[10];
close(fd);
fd =0;
rt_thread_delay(50);
rt_memset(buf,0,10);
fd =open("/myfile.txt",DFS_O_RDONLY,0);
if(read(fd,buf,7))
{
rt_kprintf("read=%s\r\n",buf);
}
else
{
rt_kprintf("read file err!\r\n");
}
}
}
结果如下:
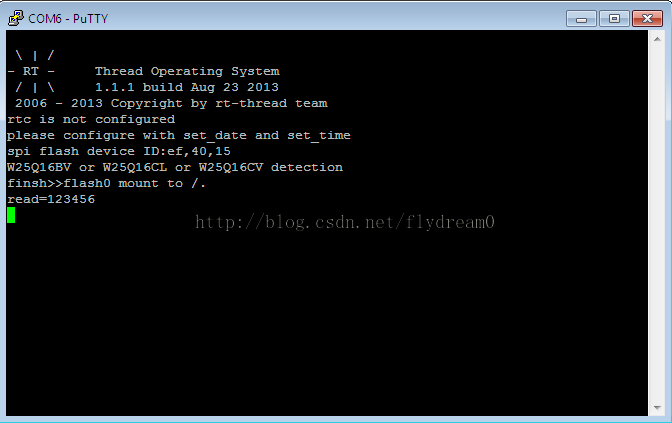
写进myfile.txt文件中的内容又可以原样读出来.
也可以通过ls指令再次查看/目录下的内容:
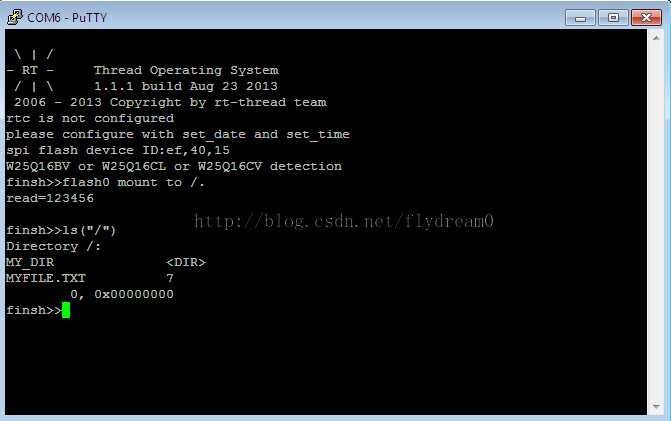
这样就验证了文件系统完全可以正常工作了.
完!