基于v4l2的webcam应用, 本地预监
今天尝试编写了一个基于 v4l2 的摄像头应用, 目前仅仅实现从摄像头捕捉视频, 然后本地回显.
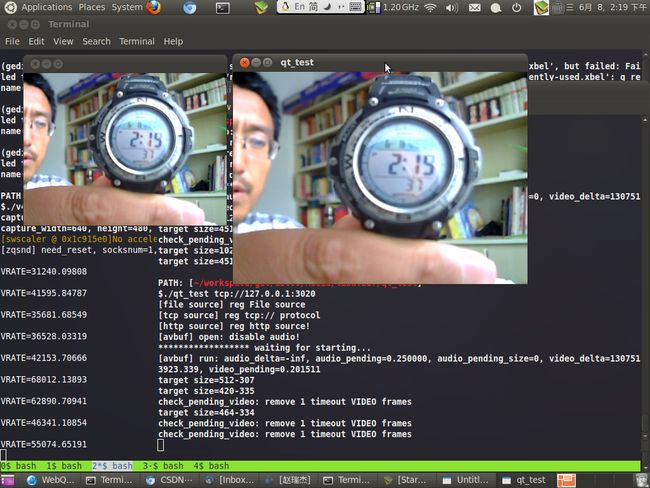
照例先上效果图, 其中左侧小点为预监窗口, 右侧为经过 x264 压缩, tcp 传输, libavcodec 解压, 再用 qt 显示的效果., 延迟很低很低 :)
主要就是以下几个知识点:
1. v4l2接口:
2. X11的本地回显:
3. 使用 libswscale 进行拉伸:
4. 使用 libx264 压缩:
1. v4l2接口: 大眼一看, 密密丫丫的 VIDIOC_XXXX, 其实静下心来, 也没多少, 很清晰, 大体流程如下:
capture_open(name)
open /dev/video0 // 打开设备
check driver caps // 检查一些 caps
VIDIOC_REQBUFS // 使用 streaming mode, mmap mode, 分配
VIDIOC_QUERYBUF // 获取分配的buf, 并且mmap到进程空间
mmap
VIDIOC_QBUF // buf 入列
VIDIOC_STREAMON // 开始
使用的数据结构
struct Buffer { void *start; size_t length; }; typedef struct Buffer Buffer; struct Ctx { int vid; int width, height; // 输出图像大小 struct SwsContext *sws; // 用于转换 int rows; // 用于 sws_scale() int bytesperrow; // 用于cp到 pic_src AVPicture pic_src, pic_target; // 用于 sws_scale Buffer bufs[2]; // 用于 mmap }; typedef struct Ctx Ctx;
capture_open(...) 打开设备
void *capture_open (const char *dev_name, int t_width, int t_height) { int id = open(dev_name, O_RDWR); if (id < 0) return 0; Ctx *ctx = new Ctx; ctx->vid = id; // to query caps v4l2_capability caps; ioctl(id, VIDIOC_QUERYCAP, &caps); if (caps.capabilities & V4L2_CAP_VIDEO_CAPTURE) { if (caps.capabilities & V4L2_CAP_READWRITE) { // TODO: ... } if (caps.capabilities & V4L2_CAP_STREAMING) { // 检查是否支持 MMAP, 还是 USERPTR v4l2_requestbuffers bufs; memset(&bufs, 0, sizeof(bufs)); bufs.count = 2; bufs.type = V4L2_BUF_TYPE_VIDEO_CAPTURE; bufs.memory = V4L2_MEMORY_MMAP; if (ioctl(id, VIDIOC_REQBUFS, &bufs) < 0) { fprintf(stderr, "%s: don't support MEMORY_MMAP mode!/n", __func__); close(id); delete ctx; return 0; } fprintf(stderr, "%s: using MEMORY_MMAP mode, buf cnt=%d/n", __func__, bufs.count); // mmap for (int i = 0; i < 2; i++) { v4l2_buffer buf; memset(&buf, 0, sizeof(buf)); buf.type = bufs.type; buf.memory = bufs.memory; if (ioctl(id, VIDIOC_QUERYBUF, &buf) < 0) { fprintf(stderr, "%s: VIDIOC_QUERYBUF ERR/n", __func__); close(id); delete ctx; return 0; } ctx->bufs[i].length = buf.length; ctx->bufs[i].start = mmap(0, buf.length, PROT_READ|PROT_WRITE, MAP_SHARED, id, buf.m.offset); } } else { fprintf(stderr, "%s: can't support read()/write() mode and streaming mode/n", __func__); close(id); delete ctx; return 0; } } else { fprintf(stderr, "%s: can't support video capture!/n", __func__); close(id); delete ctx; return 0; } int rc; // enum all support image fmt v4l2_fmtdesc fmt_desc; uint32_t index = 0; // 看起来, 不支持 plane fmt, 直接使用 yuyv 吧, 然后使用 libswscale 转换 #if 0 do { fmt_desc.index = index; fmt_desc.type = V4L2_BUF_TYPE_VIDEO_CAPTURE; rc = ioctl(id, VIDIOC_ENUM_FMT, &fmt_desc); if (rc >= 0) { fprintf(stderr, "/t support %s/n", fmt_desc.description); } index++; } while (rc >= 0); #endif // 0 v4l2_format fmt; fmt.type = V4L2_BUF_TYPE_VIDEO_CAPTURE; rc = ioctl(id, VIDIOC_G_FMT, &fmt); if (rc < 0) { fprintf(stderr, "%s: can't VIDIOC_G_FMT.../n", __func__); return 0; } PixelFormat pixfmt = PIX_FMT_NONE; switch (fmt.fmt.pix.pixelformat) { case V4L2_PIX_FMT_YUYV: pixfmt = PIX_FMT_YUYV422; break; } if (pixfmt == PIX_FMT_NONE) { fprintf(stderr, "%s: can't support %4s/n", __func__, (char*)&fmt.fmt.pix.pixelformat); return 0; } // 构造转换器 fprintf(stderr, "capture_width=%d, height=%d, stride=%d/n", fmt.fmt.pix.width, fmt.fmt.pix.height, fmt.fmt.pix.bytesperline); ctx->width = t_width; ctx->height = t_height; ctx->sws = sws_getContext(fmt.fmt.pix.width, fmt.fmt.pix.height, pixfmt, ctx->width, ctx->height, PIX_FMT_YUV420P, // PIX_FMT_YUV420P 对应 X264_CSP_I420 SWS_FAST_BILINEAR, 0, 0, 0); ctx->rows = fmt.fmt.pix.height; ctx->bytesperrow = fmt.fmt.pix.bytesperline; avpicture_alloc(&ctx->pic_target, PIX_FMT_YUV420P, ctx->width, ctx->height); // queue buf for (int i = 0; i < sizeof(ctx->bufs)/sizeof(Buffer); i++) { v4l2_buffer buf; memset(&buf, 0, sizeof(buf)); buf.type = V4L2_BUF_TYPE_VIDEO_CAPTURE; buf.memory = V4L2_MEMORY_MMAP; buf.index = i; if (ioctl(id, VIDIOC_QBUF, &buf) < 0) { fprintf(stderr, "%s: VIDIOC_QBUF err/n", __func__); exit(-1); } } int type = V4L2_BUF_TYPE_VIDEO_CAPTURE; if (ioctl(id, VIDIOC_STREAMON, &type) < 0) { fprintf(stderr, "%s: VIDIOC_STREAMON err/n", __func__); exit(-1); } return ctx; }
capture_get_pic()
VIDIOC_DQBUF // 出列,
sws_scale // 格式转换/拉伸到 PIX_FMT_YUV420P, 准备方便压缩
VIDIOC_QBUF // 重新入列
capture_get_picture(...) 从摄像头得到一帧图片
int capture_get_picture (void *id, Picture *pic) { // 获取, 转换 Ctx *ctx = (Ctx*)id; v4l2_buffer buf; memset(&buf, 0, sizeof(buf)); buf.type = V4L2_BUF_TYPE_VIDEO_CAPTURE; buf.memory = V4L2_MEMORY_MMAP; if (ioctl(ctx->vid, VIDIOC_DQBUF, &buf) < 0) { fprintf(stderr, "%s: VIDIOC_DQBUF err/n", __func__); return -1; } // _save_pic(ctx->bufs[buf.index].start, buf.length); // __asm("int $3"); ctx->pic_src.data[0] = (unsigned char*)ctx->bufs[buf.index].start; ctx->pic_src.data[1] = ctx->pic_src.data[2] = ctx->pic_src.data[3] = 0; ctx->pic_src.linesize[0] = ctx->bytesperrow; ctx->pic_src.linesize[1] = ctx->pic_src.linesize[2] = ctx->pic_src.linesize[3] = 0; // sws_scale int rs = sws_scale(ctx->sws, ctx->pic_src.data, ctx->pic_src.linesize, 0, ctx->rows, ctx->pic_target.data, ctx->pic_target.linesize); // out for (int i = 0; i < 4; i++) { pic->data[i] = ctx->pic_target.data[i]; pic->stride[i] = ctx->pic_target.linesize[i]; } // re queue buf if (ioctl(ctx->vid, VIDIOC_QBUF, &buf) < 0) { fprintf(stderr, "%s: VIDIOC_QBUF err/n", __func__); return -1; } return 1; }
2. X11 的本地回显: 采用 XShm, 效率还行
vs_open ()
XOpenDisplay()
XCreateSimpleWindow()
XCreateGC()
XMapWindow()
XShmCreateImage()
shmget()
shmat()
使用的数据结构
struct Ctx { Display *display; int screen; Window window; GC gc; XVisualInfo vinfo; XImage *image; XShmSegmentInfo segment; SwsContext *sws; PixelFormat target_pixfmt; AVPicture pic_target; int v_width, v_height; int curr_width, curr_height; }; typedef struct Ctx Ctx;
vs_open(...) 打开设备
void *vs_open (int v_width, int v_height) { Ctx *ctx = new Ctx; ctx->v_width = v_width; ctx->v_height = v_height; // window ctx->display = XOpenDisplay(0); ctx->window = XCreateSimpleWindow(ctx->display, RootWindow(ctx->display, 0), 100, 100, v_width, v_height, 0, BlackPixel(ctx->display, 0), WhitePixel(ctx->display, 0)); ctx->screen = 0; ctx->gc = XCreateGC(ctx->display, ctx->window, 0, 0); XMapWindow(ctx->display, ctx->window); // current screen pix fmt Window root; unsigned int cx, cy, border, depth; int x, y; XGetGeometry(ctx->display, ctx->window, &root, &x, &y, &cx, &cy, &border, &depth); // visual info XMatchVisualInfo(ctx->display, ctx->screen, depth, DirectColor, &ctx->vinfo); // image ctx->image = XShmCreateImage(ctx->display, ctx->vinfo.visual, depth, ZPixmap, 0, &ctx->segment, cx, cy); if (!ctx->image) { fprintf(stderr, "%s: can't XShmCreateImage !/n", __func__); exit(-1); } ctx->segment.shmid = shmget(IPC_PRIVATE, ctx->image->bytes_per_line * ctx->image->height, IPC_CREAT | 0777); if (ctx->segment.shmid < 0) { fprintf(stderr, "%s: shmget err/n", __func__); exit(-1); } ctx->segment.shmaddr = (char*)shmat(ctx->segment.shmid, 0, 0); if (ctx->segment.shmaddr == (char*)-1) { fprintf(stderr, "%s: shmat err/n", __func__); exit(-1); } ctx->image->data = ctx->segment.shmaddr; ctx->segment.readOnly = 0; XShmAttach(ctx->display, &ctx->segment); PixelFormat target_pix_fmt = PIX_FMT_NONE; switch (ctx->image->bits_per_pixel) { case 32: target_pix_fmt = PIX_FMT_RGB32; break; case 24: target_pix_fmt = PIX_FMT_RGB24; break; default: break; } if (target_pix_fmt == PIX_FMT_NONE) { fprintf(stderr, "%s: screen depth format err/n", __func__); delete ctx; return 0; } // sws ctx->target_pixfmt = target_pix_fmt; ctx->curr_width = cx; ctx->curr_height = cy; ctx->sws = sws_getContext(v_width, v_height, PIX_FMT_YUV420P, cx, cy, target_pix_fmt, SWS_FAST_BILINEAR, 0, 0, 0); avpicture_alloc(&ctx->pic_target, target_pix_fmt, cx, cy); XFlush(ctx->display); return ctx; }
vs_show()
sws_scale() // 拉伸到当前窗口大小, 转换格式
XShmPutImage() // 显示, 呵呵, 真的很简单
vs_show(...) 主要代码都是处理窗口变化的
int vs_show (void *ctx, unsigned char *data[4], int stride[4]) { // 首选检查 sws 是否有效, 根据当前窗口大小决定 Ctx *c = (Ctx*)ctx; Window root; int x, y; unsigned int cx, cy, border, depth; XGetGeometry(c->display, c->window, &root, &x, &y, &cx, &cy, &border, &depth); if (cx != c->curr_width || cy != c->curr_height) { avpicture_free(&c->pic_target); sws_freeContext(c->sws); c->sws = sws_getContext(c->v_width, c->v_height, PIX_FMT_YUV420P, cx, cy, c->target_pixfmt, SWS_FAST_BILINEAR, 0, 0, 0); avpicture_alloc(&c->pic_target, c->target_pixfmt, cx, cy); c->curr_width = cx; c->curr_height = cy; // re create image XShmDetach(c->display, &c->segment); shmdt(c->segment.shmaddr); shmctl(c->segment.shmid, IPC_RMID, 0); XDestroyImage(c->image); c->image = XShmCreateImage(c->display, c->vinfo.visual, depth, ZPixmap, 0, &c->segment, cx, cy); c->segment.shmid = shmget(IPC_PRIVATE, c->image->bytes_per_line * c->image->height, IPC_CREAT | 0777); c->segment.shmaddr = (char*)shmat(c->segment.shmid, 0, 0); c->image->data = c->segment.shmaddr; c->segment.readOnly = 0; XShmAttach(c->display, &c->segment); } // sws_scale(c->sws, data, stride, 0, c->v_height, c->pic_target.data, c->pic_target.linesize); // cp to image unsigned char *p = c->pic_target.data[0], *q = (unsigned char*)c->image->data; int xx = MIN(c->image->bytes_per_line, c->pic_target.linesize[0]); for (int i = 0; i < c->curr_height; i++) { memcpy(q, p, xx); p += c->image->bytes_per_line; q += c->pic_target.linesize[0]; } // 显示到 X 上 XShmPutImage(c->display, c->window, c->gc, c->image, 0, 0, 0, 0, c->curr_width, c->curr_height, 1); return 1; }
3. libswscale: 用于picture格式/大小转换, 占用cpu挺高 :), 用起来很简单, 基本就是
sws = sws_getContext(....);
sws_scale(sws, ...)
4. libx264 压缩: 考虑主要用于互动, 所以使用 preset=fast, tune=zerolatency, 320x240, 10fps, 300kbps, jj实测延迟很低, 小于 100ms
使用的数据结构
struct Ctx { x264_t *x264; x264_picture_t picture; x264_param_t param; void *output; // 用于保存编码后的完整帧 int output_bufsize, output_datasize; int64_t pts; // 输入 pts int64_t (*get_pts)(struct Ctx *); int64_t info_pts, info_dts; int info_key_frame; int info_valid; };
vc_open(...) 设置必要的参数, 打开编码器
void *vc_open (int width, int height) { Ctx *ctx = new Ctx; // 设置编码属性 //x264_param_default(&ctx->param); x264_param_default_preset(&ctx->param, "fast", "zerolatency"); ctx->param.i_width = width; ctx->param.i_height = height; ctx->param.b_repeat_headers = 1; // 重复SPS/PPS 放到关键帧前面 ctx->param.b_cabac = 1; ctx->param.i_fps_num = 10; ctx->param.i_fps_den = 1; ctx->param.i_keyint_max = 30; ctx->param.i_keyint_min = 10; // rc ctx->param.rc.i_rc_method = X264_RC_CRF; ctx->param.rc.i_bitrate = 300; //ctx->param.rc.f_rate_tolerance = 0.1; //ctx->param.rc.i_vbv_max_bitrate = ctx->param.rc.i_bitrate * 1.3; //ctx->param.rc.f_rf_constant = 600; //ctx->param.rc.f_rf_constant_max = ctx->param.rc.f_rf_constant * 1.3; #ifdef DEBUG ctx->param.i_log_level = X264_LOG_WARNING; #else ctx->param.i_log_level = X264_LOG_NONE; #endif // release ctx->x264 = x264_encoder_open(&ctx->param); if (!ctx->x264) { fprintf(stderr, "%s: x264_encoder_open err/n", __func__); delete ctx; return 0; } x264_picture_init(&ctx->picture); ctx->picture.img.i_csp = X264_CSP_I420; ctx->picture.img.i_plane = 3; ctx->output = malloc(128*1024); ctx->output_bufsize = 128*1024; ctx->output_datasize = 0; ctx->get_pts = first_pts; ctx->info_valid = 0; return ctx; }
vc_compress(...) 压缩, 如果成功, 得到串流
static int encode_nals (Ctx *c, x264_nal_t *nals, int nal_cnt) { char *pout = (char*)c->output; c->output_datasize = 0; for (int i = 0; i < nal_cnt; i++) { if (c->output_datasize + nals[i].i_payload > c->output_bufsize) { // 扩展 c->output_bufsize = (c->output_datasize+nals[i].i_payload+4095)/4096*4096; c->output = realloc(c->output, c->output_bufsize); } memcpy(pout+c->output_datasize, nals[i].p_payload, nals[i].i_payload); c->output_datasize += nals[i].i_payload; } return c->output_datasize; } int vc_compress (void *ctx, unsigned char *data[4], int stride[4], const void **out, int *len) { Ctx *c = (Ctx*)ctx; // 设置 picture 数据 for (int i = 0; i < 4; i++) { c->picture.img.plane[i] = data[i]; c->picture.img.i_stride[i] = stride[i]; } // encode x264_nal_t *nals; int nal_cnt; x264_picture_t pic_out; c->picture.i_pts = c->get_pts(c); #ifdef DEBUG_MORE static int64_t _last_pts = c->picture.i_pts; fprintf(stderr, "DBG: pts delta = %lld/n", c->picture.i_pts - _last_pts); _last_pts = c->picture.i_pts; #endif // x264_picture_t *pic = &c->picture; do { // 这里努力消耗掉 delayed frames ??? // 实际使用 zerolatency preset 时, 效果足够好了 int rc = x264_encoder_encode(c->x264, &nals, &nal_cnt, pic, &pic_out); if (rc < 0) return -1; encode_nals(c, nals, nal_cnt); } while (0); *out = c->output; *len = c->output_datasize; if (nal_cnt > 0) { c->info_valid = 1; c->info_key_frame = pic_out.b_keyframe; c->info_pts = pic_out.i_pts; c->info_dts = pic_out.i_dts; } else { fprintf(stderr, "."); return 0; // 继续 } #ifdef DEBUG_MORE static size_t _seq = 0; fprintf(stderr, "#%lu: [%c] frame type=%d, size=%d/n", _seq, pic_out.b_keyframe ? '*' : '.', pic_out.i_type, c->output_datasize); _seq++; #endif // debug return 1; }
附上源码: 唉, 源码是不停更新的, csdn居然没有一个类似 git, svn 之类的仓库, 算了, 如果有人要, email吧.
main.cpp 主流程
capture.cpp, capture.h 获取 v4l2 的图像帧
vcompress.cpp vcompress.h 实现 x264 的压缩
vshow.cpp vsho.h 用 X11 显示实时图像