MeanShift聚类算法
MeanShift算法是一个非参数聚类技术,它不要求预先知道聚类的类别个数,对聚类的形状也没有限制。
给定在d维空间上的n个数据点xi, i = 1, ..., n,由核函数K(x)和窗口半径h得到的多元核密度估计函数是:

对于径向对称核函数,它足以确定核函数的更新,核函数k(x)满足:

这里ck,d 是一个归一化的常量,它确保K(x)的积分为1。密度函数的模式位于梯度函数为0的地方,![]()
密度函数的梯度估计(1)为:

其中 ![]() 。第一项正比于在x处的估计,x是由
。第一项正比于在x处的估计,x是由![]() 计算得到的;第二项
计算得到的;第二项

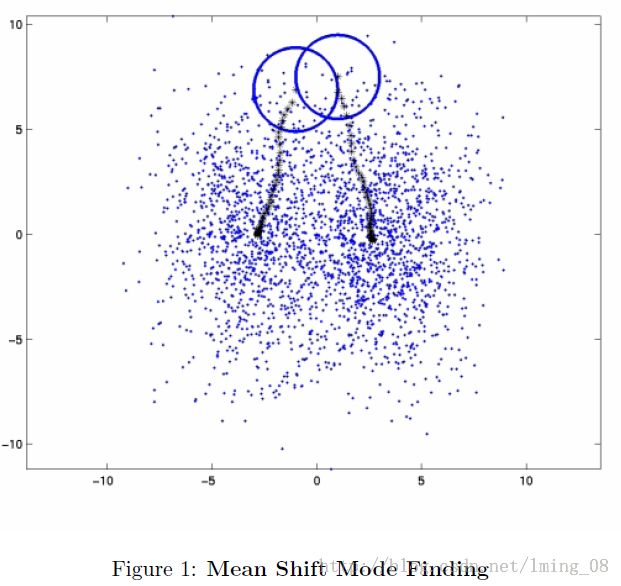
是一个MeanShift。MeanShift向量总是指向密度增长最大的方向。MeanShift求解的步骤,是逐次迭代执行以下过程:
- MeanShift向量 的计算

- 平移窗口

以上迭代过程会收敛于一个点,在该点处密度函数的梯度为0。找到MeanShift模式的过程如图1所示
The mean shift clustering algorithm is a practical application of the mode finding procedure
MeanShift聚类算法是一个实用的模式查找过程应用程序:
- 为了找到密度函数的驻点,从数据点开始,运行MeanShift过程
- 通过只保留局部最大值修剪这些点
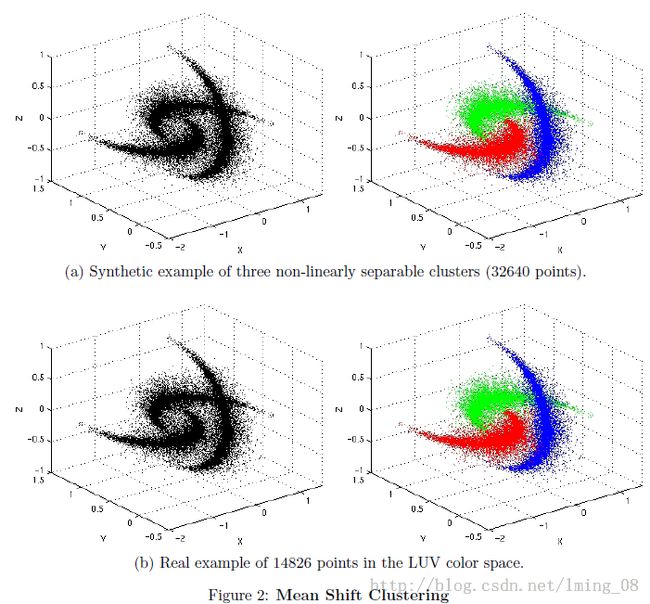
收敛于相同模式的所有点构成的集合定义了模式的吸引域。处于相同吸引域的点聚成相同的一类,图二展示了基于三维数据点的MeanShift聚类的两个例子:
以上内容翻译自:http://homepages.inf.ed.ac.uk/rbf/CVonline/LOCAL_COPIES/TUZEL1/MeanShift.pdf
下面针对以上理论实现该算法,并编写测试用例。
//meanshift.h
#ifndef _MEANSHIFT_H_
#define _MEANSHIFT_H_
#include "common.h"
class MeanShift
{
public:
typedef std::vector<VecPoint> VecVecPoint;
static const float NEAREST_ZERO;
static const float C; //!高斯核函数中的常数
MeanShift() : m_size(0), R(0.0f){}
/** \brief 设置输入点云
* \param[in] pPntCloud 输入点云
*/
bool setInputCloud(const PointCloud<PointXYZ>::Ptr pPntCloud);
/** \brief 获取聚类后的点云 */
VecVecPoint & getOutputCloud()
{
return vv_pnt;
}
/** \brief 设置K近邻算法的搜索半径
* \param[in] radius 半径
*/
bool setKNNRadius(const float radius)
{
R = radius;
return true;
}
/** \brief 执行MeanShift聚类算法 */
bool process();
/** \brief 保存聚类后的点云文件
* \param[in] dir_name 保存的目录
* \param[in] prex_name 文件名前缀
*/
bool SaveFile(const char *dir_name, const char *prex_name);
private:
size_t m_size; //!要处理点的个数
PointCloud<PointXYZ>::Ptr mp_pointcloud; //!PCL形式的点云,主要是为了使用FLANN的KD树
VecPoint mv_pntcld; //!点云
VecPoint mv_local_mode; //!每个点的局部模式
VecVecPoint vv_pnt; //!聚类后的点云
float R; //!K近邻算法时对应的搜索半径
/** \brief 对每个点执行MeanShift
* \param[in] in_pnt 输入的点
* \param[out] out_pnt 输出的点
*/
inline bool execMeanShiftEachPoint(const PointXYZ &in_pnt, Point &out_pnt);
/** \brief 将具有相同局部模式的点归为一类
* \param[in] v_localmode 各个点对应的局部模式
* \param[out] vv_pnt 归并后的点
*/
bool mergeSameLocalModePoint(const VecPoint &v_localmode, VecVecPoint &vv_pnt);
inline float gauss(float x)
{
return C * sqrt(x) * exp(-0.5 * x);
}
};
#endif
//meanshift.cpp
#include "meanshift.h"
const float MeanShift::NEAREST_ZERO = 0.01;
const float MeanShift::C = 2.0f;
bool MeanShift::setInputCloud(const PointCloud<PointXYZ>::Ptr pPntCloud)
{
m_size = pPntCloud->points.size();
mv_pntcld.resize(m_size);
mv_local_mode.resize(m_size);
mp_pointcloud = pPntCloud;
for (size_t i = 0; i < m_size; ++i)
{
mv_pntcld[i].x = pPntCloud->points[i].x;
mv_pntcld[i].y = pPntCloud->points[i].y;
mv_pntcld[i].z = pPntCloud->points[i].z;
}
return true;
}
inline bool MeanShift::execMeanShiftEachPoint(const PointXYZ &in_pnt, Point &out_pnt)
{
// Set up KDTree
pcl::KdTreeFLANN<PointXYZ>::Ptr tree (new pcl::KdTreeFLANN<PointXYZ>);
tree->setInputCloud (mp_pointcloud);
// Main Loop
PointXYZ pnt = in_pnt;
while (1)
{
// Neighbors containers
std::vector<int> k_indices;
std::vector<float> k_distances;
float sum_weigh = 0;
float x = 0.0f, y = 0.0f, z = 0.0f;
float dist_pnts = 0.0f;
tree->radiusSearch (pnt, R, k_indices, k_distances);
for (int i = 0, pnumber = k_indices.size(); i < pnumber; ++i)
{
size_t index = k_indices[i];
PointXYZ &nbhd_pnt = mp_pointcloud->points[index];
float sqr_dist = k_distances[i];
float gauss_param = sqr_dist / (R * R);
float w = gauss(gauss_param);
x += nbhd_pnt.x * w;
y += nbhd_pnt.y * w;
z += nbhd_pnt.z * w;
sum_weigh += w;
}
x = x / sum_weigh;
y = y / sum_weigh;
z = z / sum_weigh;
float diff_x = x - pnt.x, diff_y = y - pnt.y, diff_z = z - pnt.z;
dist_pnts = sqrt(diff_x * diff_x + diff_y * diff_y + diff_z * diff_z);
if (dist_pnts <= 0.0001/*MeanShift::NEAREST_ZERO*/)
{
break;
}
pnt.x = x;
pnt.y = y;
pnt.z = z;
};
out_pnt.x = pnt.x;
out_pnt.y = pnt.y;
out_pnt.z = pnt.z;
return true;
}
bool MeanShift::mergeSameLocalModePoint(const VecPoint &v_localmode, VecVecPoint &vv_pnt)
{
assert(v_localmode.size() == m_size);
std::vector<bool> v_iscluster(m_size, false);
for (size_t i = 0; i < m_size; ++i)
{
for (size_t j = i + 1; j < m_size; ++j)
{
const Point & lmpnt1 = v_localmode[i];
const Point & lmpnt2 = v_localmode[j];
Point pnt1(mp_pointcloud->points[i].x, mp_pointcloud->points[i].y, mp_pointcloud->points[i].z);
Point pnt2(mp_pointcloud->points[j].x, mp_pointcloud->points[j].y, mp_pointcloud->points[j].z);
float dist = 0.0f;
dist = getPointsDist(lmpnt1, lmpnt2);
if (dist <= MeanShift::NEAREST_ZERO)
{
//两个点可近似重合
VecPoint v_pnt;
if ( !v_iscluster[i] && !v_iscluster[j])
{
v_iscluster[i] = true;
v_pnt.push_back(pnt1);
v_iscluster[j] = true;
v_pnt.push_back(pnt2);
vv_pnt.push_back(v_pnt);
}
else if ( v_iscluster[i] && !v_iscluster[j])
{
size_t clustered_count = vv_pnt.size();
size_t m, n;
for (m = 0; m < clustered_count; ++m)
{
size_t count = vv_pnt[m].size();
for (n = 0; n < count; ++n)
{
if (pnt1 == vv_pnt[m][n])
{
vv_pnt[m].push_back(pnt2);
v_iscluster[j] = true;
goto LABEL1;
}
} // for n
} // for m
LABEL1:
;
} // else if
else if ( !v_iscluster[i] && v_iscluster[j])
{
size_t clustered_count = vv_pnt.size();
size_t m, n;
for (m = 0; m < clustered_count; ++m)
{
size_t count = vv_pnt[m].size();
for (n = 0; n < count; ++n)
{
if (pnt2 == vv_pnt[m][n])
{
vv_pnt[m].push_back(pnt1);
v_iscluster[i] = true;
goto LABEL2;
}
} // for n
} // for m
LABEL2:
;
}
else
{
//都已经聚类,就不做处理
}
} // if (dist <= NEAREST_ZERO)
} // for j
} // for i
for (size_t i = 0; i < m_size; ++i)
{
if (!v_iscluster[i])
{
Point pnt(mp_pointcloud->points[i].x, mp_pointcloud->points[i].y, mp_pointcloud->points[i].z);
VecPoint v_pnt;
v_iscluster[i] = true;
v_pnt.push_back(pnt);
vv_pnt.push_back(v_pnt);
}
}
return true;
}
bool MeanShift::process()
{
for (size_t i = 0; i < m_size; ++i)
{
const PointXYZ &pnt = mp_pointcloud->points[i];
execMeanShiftEachPoint(pnt, mv_local_mode[i]);
}
mergeSameLocalModePoint(mv_local_mode, vv_pnt);
return true;
}
bool MeanShift::SaveFile(const char *dir_name, const char *prex_name)
{
size_t cluster_count = vv_pnt.size();
for (size_t i = 0; i < cluster_count; ++i)
{
pcl::PointCloud<pcl::PointXYZ>::Ptr p_pnt_cloud(new pcl::PointCloud<pcl::PointXYZ> ());
for (size_t j = 0, grp_pnt_count = vv_pnt[i].size(); j < grp_pnt_count; ++j)
{
pcl::PointXYZ pt;
pt.x = vv_pnt[i][j].x;
pt.y = vv_pnt[i][j].y;
pt.z = vv_pnt[i][j].z;
p_pnt_cloud->points.push_back(pt);
}
p_pnt_cloud->width = static_cast<size_t>(vv_pnt[i].size());
p_pnt_cloud->height = 1;
char newFileName[256] = {0};
char indexStr[16] = {0};
strcat(newFileName, dir_name);
strcat(newFileName, "/");
strcat(newFileName, prex_name);
strcat(newFileName, "-");
sprintf(indexStr, "%d", i + 1);
strcat(newFileName, indexStr);
strcat(newFileName, ".pcd");
io::savePCDFileASCII(newFileName, *p_pnt_cloud);
}
return true;
}
测试程序:
pcl::PointCloud<pcl::PointXYZ>::Ptr cld (new pcl::PointCloud<pcl::PointXYZ>);
int val = 10;
//构造立方体
float cube_len = 1;
srand(time(NULL));
for (float x = 0; x < cube_len; x += 0.1)
{
for (float y = 0; y < cube_len; y += 0.1)
{
for (float z = 0; z < cube_len; z += 0.1)
{
pcl::PointXYZ basic_point;
//沿着向量(2.5, 2.5, 2.5)平移
basic_point.x = (float)(rand() % val) / 10.0f + 2.5;
basic_point.y = (float)(rand() % val) / 10.0f + 2.5;
basic_point.z = (float)(rand() % val) / 10.0f + 2.5;
cld->points.push_back(basic_point);
}
}
}
for (float x = 0; x < cube_len; x += 0.1)
{
for (float y = 0; y < cube_len; y += 0.1)
{
for (float z = 0; z < cube_len; z += 0.1)
{
pcl::PointXYZ basic_point;
basic_point.x = (float)(rand() % val) / 10.0f - 2.5;
basic_point.y = (float)(rand() % val) / 10.0f - 2.5;
basic_point.z = (float)(rand() % val) / 10.0f - 2.5;
cld->points.push_back(basic_point);
}
}
}
cld->width = (int)cld->points.size();
cld->height = 1;
io::savePCDFileASCII("manual_build.pcd", *cld);
MeanShift ms;
ms.setInputCloud(cld);
ms.setKNNRadius(0.7);
ms.process();
ms.SaveFile(".", "meanshift");
system("pause");
显示manual_build.pcd文件中构造的数据为:
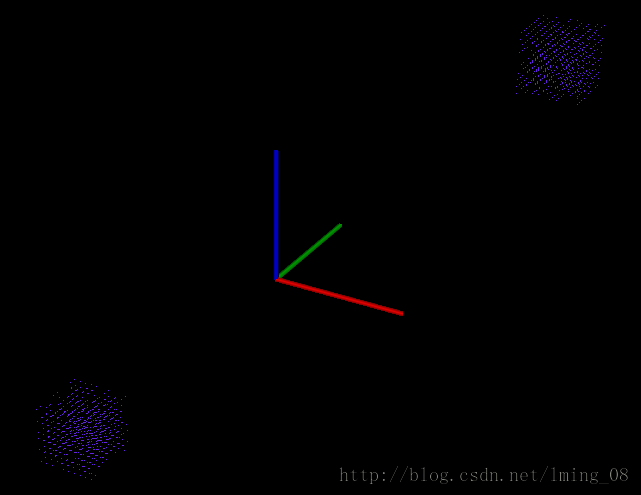
运行测试用例后生成了2个文件,对应2类,分别为meanshift-1.pcd和meanshift-2.pcd
同时显示这两个文件为:

尽管对于这个例子而言聚类比较成功,但是也有一些例子聚类效果不好,不仅如此,执行以上程序时时间复杂度过大,导致几千个点运行时间就受不鸟了,暂时还没想到如何改进。