coocox学习笔记-串口
CoIDE版本:CoIDE-V2Beta
编译器版本:gcc-arm-none-eabi-5_2-2015q4
目标板:STM32F030C8T6
之前一直使用MDK开发STM32应用程序,近日想尝试下gcc编译STM32,享受下开源的果实,于是乎在网上了解到了coocox,它有一个CoIDE用来编辑代码,是简版的eclipse,目前最新版为V2Beta,之前用eclipse生成注释很方便,所以就想试试CoIDE是否也可以,但尝试了半天也没搞定,始终无法自动生成注释。。。
coocox使用的STM32库代码是cube库而不是std标准库,看来是紧跟ST的步伐那,还好之前也使用过cube库,更加方便了coocox的上手,在CoIDE上设置好编译器路径,这个在coocox的官网上有介绍,很简单。
创建好一个STM32F030C8T6的工程,在Repository页面上添加cmsis_core、STM32F030x8_CUBELIB组件,使用coocox必须要了解的一个概念是Components(组件),它把库,驱动,OS,启动代码等抽象为组件,使用时直接添加即可,同时在组件中也配有示例代码,本例创建了一个USART的工程,添加完组件后会在工程目录下产生一个components的目录,里面存放我们添加的组件文件,目前该工程为空工程,添加两个文件uart.c、uart.h文件,工程组织如下:

uart.c和uart.h文件是从之前学习cube库时使用的直接拷贝过来稍作修改即可,uart.c代码如下:
#include "UART.h"
#include "stm32f0xx_hal_def.h"
UART_HandleTypeDef uartHandle;
uint8_t aRxBuffer[BUFFSIZE];
uint8_t aTxBuffer[BUFFSIZE];
struct uart uart_rev;
void HAL_UART_MspInit(UART_HandleTypeDef *huart)
{
GPIO_InitTypeDef GPIO_InitStruct;
/*##-1- Enable peripherals and GPIO Clocks #################################*/
/* Enable GPIO TX/RX clock */
USARTx_TX_GPIO_CLK_ENABLE();
USARTx_RX_GPIO_CLK_ENABLE();
/* Enable USART2 clock */
USARTx_CLK_ENABLE();
/*##-2- Configure peripheral GPIO ##########################################*/
/* UART TX GPIO pin configuration */
GPIO_InitStruct.Pin = USARTx_TX_PIN;
GPIO_InitStruct.Mode = GPIO_MODE_AF_PP;
GPIO_InitStruct.Pull = GPIO_NOPULL;
GPIO_InitStruct.Speed = GPIO_SPEED_HIGH;
GPIO_InitStruct.Alternate = USARTx_TX_AF;
HAL_GPIO_Init(USARTx_TX_GPIO_PORT, &GPIO_InitStruct);
/* UART RX GPIO pin configuration */
GPIO_InitStruct.Pin = USARTx_RX_PIN;
GPIO_InitStruct.Alternate = USARTx_RX_AF;
HAL_GPIO_Init(USARTx_RX_GPIO_PORT, &GPIO_InitStruct);
/*##-3- Configure the NVIC for UART ########################################*/
/* NVIC for USART2 */
HAL_NVIC_SetPriority(USARTx_IRQn, 0, 1);
HAL_NVIC_EnableIRQ(USARTx_IRQn);
}
/**
* @brief UART MSP De-Initialization
* This function frees the hardware resources used in this example:
* - Disable the Peripheral's clock
* - Revert GPIO and NVIC configuration to their default state
* @param huart: UART handle pointer
* @retval None
*/
void HAL_UART_MspDeInit(UART_HandleTypeDef *huart)
{
/*##-1- Reset peripherals ##################################################*/
USARTx_FORCE_RESET();
USARTx_RELEASE_RESET();
/*##-2- Disable peripherals and GPIO Clocks #################################*/
/* Configure UART Tx as alternate function */
HAL_GPIO_DeInit(USARTx_TX_GPIO_PORT, USARTx_TX_PIN);
/* Configure UART Rx as alternate function */
HAL_GPIO_DeInit(USARTx_RX_GPIO_PORT, USARTx_RX_PIN);
/*##-3- Disable the NVIC for UART ##########################################*/
HAL_NVIC_DisableIRQ(USARTx_IRQn);
}
/**********************************************************************
函数:uart_init()
函数作用:串口初始化
参数:
uint32_t BaudRate=========================串口波特率
返回值:无
上一版本:无
当前版本:1.0
作者:
最后修改时间:2015-04-02
说明:
**********************************************************************/
void uart_init(uint32_t BaudRate)
{
uartHandle.Instance = USARTx;
uartHandle.Init.BaudRate = BaudRate;
uartHandle.Init.WordLength = UART_WORDLENGTH_8B;
uartHandle.Init.StopBits = UART_STOPBITS_1;
uartHandle.Init.Parity = UART_PARITY_NONE;
uartHandle.Init.HwFlowCtl = UART_HWCONTROL_NONE;
uartHandle.Init.Mode = UART_MODE_TX_RX;
if(HAL_UART_Init(&uartHandle) != HAL_OK)
{
Error_Handler();
}
uart_rev.front = aRxBuffer;
uart_rev.rear = aRxBuffer; //两个指针指向相同的地址空间
if(HAL_UART_Receive_IT(&uartHandle,(uint8_t*)aRxBuffer,1) != HAL_OK)
{
Error_Handler();
}
}
void Error_Handler(void)
{
while(1)
{
}
}
/**********************************************************************
函数:uart_read()
函数作用:从接收缓冲区中读取数据
参数:
uint8_t *fmt--------------------------------接收到的数据
uint16_t time_out---------------------------超时时间
返回值:0:读取到数据-1:没有读取到数据
上一版本:无
当前版本:1.0
作者:
最后修改时间:2015-04-08
说明:
**********************************************************************/
int8_t uart_read(uint8_t *fmt, uint16_t time_out)
{
while(time_out)
{
if(uart_rev.front != uart_rev.rear)
{
//如果队首指针和队尾指针不同表明缓冲区中有数据还未收取
*fmt=*uart_rev.front;
uart_rev.front++;
if (uart_rev.front >= (aRxBuffer+BUFFSIZE))
uart_rev.front = aRxBuffer;
return 0;
}
time_out--;
}
return (int8_t)-1;
}
/**********************************************************************
函数:uart_char()
函数作用:发送一个字节数据
参数:
uint8_t *fmt--------------------------------接收到的数据
返回值:
上一版本:无
当前版本:1.0
作者:
最后修改时间:2015-04-08
说明:
**********************************************************************/
void uart_char(uint8_t fmt)
{
uartHandle.Instance->TDR = fmt;
while(!(uartHandle.Instance->ISR & USART_ISR_TXE));
}
void uart_send(uint8_t *fmt, uint16_t len)
{
while(len)
{
uart_char(*fmt);
fmt++;
len--;
}
return ;
}
/***********************************************************************************
函数:fputc(int ch, FILE *f)
功能:重载标准函数里面的输入输出函数
参数:无
版本:V0.0.0
作者:
备注:
************************************************************************************/
#if defined(UART_DEBUG)
int fputc(int ch, FILE *f)
{
USARTx->TDR = ch;
while(!(USARTx->ISR & USART_ISR_TXE));
return ch;
}
#endif
/**
* @brief UART error callbacks
* @param UartHandle: UART handle
* @note This example shows a simple way to report transfer error, and you can
* add your own implementation.
* @retval None
*/
void HAL_UART_ErrorCallback(UART_HandleTypeDef *huart)
{
}
/**
* @brief Tx Transfer completed callback
* @param UartHandle: UART handle.
* @note This example shows a simple way to report end of IT Tx transfer, and
* you can add your own implementation.
* @retval None
*/
void HAL_UART_TxCpltCallback(UART_HandleTypeDef * huart)
{
}
/**
* @brief Rx Transfer completed callback
* @param UartHandle: UART handle
* @note This example shows a simple way to report end of IT Rx transfer, and
* you can add your own implementation.
* @retval None
*/
void HAL_UART_RxCpltCallback(UART_HandleTypeDef *huart)
{
/* Set transmission flag: trasfer complete*/
uart_rev.rear++; //更新rear指针
if(uart_rev.rear >= (aRxBuffer + BUFFSIZE))
uart_rev.rear = aRxBuffer;
HAL_UART_Receive_IT(huart,uart_rev.rear,1);
}
/******************************************************************************/
/* STM32L0xx Peripherals Interrupt Handlers */
/* Add here the Interrupt Handler for the used peripheral(s) (PPP), for the */
/* available peripheral interrupt handler's name please refer to the startup */
/* file (startup_stm32l0xx.s). */
/******************************************************************************/
/**
* @brief This function handles UART interrupt request.
* @param None
* @retval None
* @Note This function is redefined in "main.h" and related to DMA stream
* used for USART data transmission
*/
void USARTx_IRQHandler(void)
{
HAL_UART_IRQHandler(& uartHandle);
}
uart.h代码如下:
#ifndef __UART_H__
#define __UART_H__
#include "stm32f0xx_hal.h"
#include "stm32f0xx_hal_def.h"
#include "stm32f0xx_hal_uart.h"
#define UART_DEBUG
//#undef UART_DEBUG
#ifdef UART_DEBUG
#include <stdio.h>
#include <stdarg.h>
#endif
struct uart
{
uint8_t *rear; //在中断函数中更改
uint8_t *front; //在主循环中更改
};
#define USARTx USART1
#define USARTx_CLK_ENABLE() __USART1_CLK_ENABLE()
#define USARTx_RX_GPIO_CLK_ENABLE() __GPIOA_CLK_ENABLE()
#define USARTx_TX_GPIO_CLK_ENABLE() __GPIOA_CLK_ENABLE()
#define USARTx_FORCE_RESET() __USART1_FORCE_RESET()
#define USARTx_RELEASE_RESET() __USART1_RELEASE_RESET()
/* Definition for USARTx Pins */
#define USARTx_TX_PIN GPIO_PIN_9
#define USARTx_TX_GPIO_PORT GPIOA
#define USARTx_TX_AF GPIO_AF1_USART1
#define USARTx_RX_PIN GPIO_PIN_10
#define USARTx_RX_GPIO_PORT GPIOA
#define USARTx_RX_AF GPIO_AF1_USART1
/* Definition for USARTx's NVIC */
#define USARTx_IRQn USART1_IRQn
#define USARTx_IRQHandler USART1_IRQHandler
#define BUFFSIZE 500
void HAL_UART_MspInit(UART_HandleTypeDef * huart);
void HAL_UART_MspDeInit(UART_HandleTypeDef * huart);
void uart_init(uint32_t BaudRate);
int8_t uart_read(uint8_t *fmt, uint16_t time_out);
void uart_char(uint8_t fmt);
void uart_send(uint8_t *fmt, uint16_t len);
void Error_Handler(void);
void USARTx_IRQHandler(void);
#endif
</span>
主函数稍作修改即可,由于在uart中已经定义了Error_Handler()方法,因此把main.c中的删掉并添加uart的初始化代码,如下
<span style="font-size:14px;">/* Add your application code here
*/
uart_init(115200);
/* Infinite loop */
while (1)
{
uart_send("1234567890\r\n",12);
HAL_Delay(500);
}
编译并下载代码到目标板运行,结果如下:
运行正常。
串口正常以后,就在想在coocox中如何使用printf函数呢,即把printf函数重定向到串口上,刚好在coocox的组件中有一个组件为Retarget_printf,添加该组件到工程中,该组件中有一个printf.c文件,用户需要去实现PrintChar(char c)函数,我们把在uart.c文件中的fputc函数替换成PrintChar(char c)函数,如下:
#if defined(UART_DEBUG)
void PrintChar(char c)
{
USARTx->TDR = c;
while(!(USARTx->ISR & USART_ISR_TXE));
return;
}
#endif
在主函数中使用printf来打印信息,编译后发现一个错误,提示impure_ptr重复定义,在coocox官网中也有人遇到说是因为使用了标准的系统启动文件,在配置选项中勾选不使用标准的系统启动文件,如下:
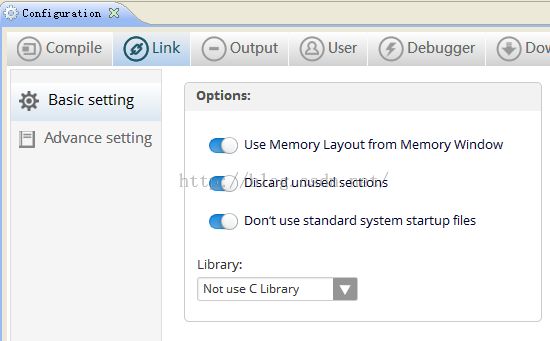
再次编译提示位定义_init,在main.c文件中添加一个空的_init()函数,编译通过,下载运行,发现没有换行,如下:

0x0A字符没有输出,不得不说printf.c文件实现还是有些小问题的,解决办法是把"\r\n"放在最前面即可
while (1)
{
printf("\r\n1234567890");
HAL_Delay(500);
}
此时输出的信息是正常的,同时我们也可以格式化输出字符或整型值,但目前printf.c文件不支持浮点型数据输出,可以查看printf.c文件如下:

这个问题,coocox官网上有说不使用printf.c文件而是使用C库实现。我想修改下printf.c文件应该也是可以的。输出整型值如下:
浮点数支持的话,自己动手修改printf.c文件貌似比较费时间,还是用C库吧,毕竟之前MDK都是用的C库也,在工程中移除Retarget_printf组件,添加C_library组件,里面有一个syscalls.c文件,提供给用户一个_write接口,由于在CoIDE中所有组件文件都是上锁的,因此我们在外部用文本编辑器修改syscalls.c文件的_write函数,把宏打开,如下
/*Low layer write(output) function*/
__attribute__ ((used))
int _write(int file, char *ptr, int len)
{
#if 1
//user code example
int i;
(void)file;
for(i = 0; i < len; i++)
{
// UART_PutChar is user's basic output function
UART_PutChar(*ptr++);
}
#endif
return len;
}用户需要实现UART_PutChar()方法,把之前uart.c文件中的PutChar()方法换个名字就行了。由于使用到了C库,因此在配置选项的Link页面勾选使用Nano C库,如下:
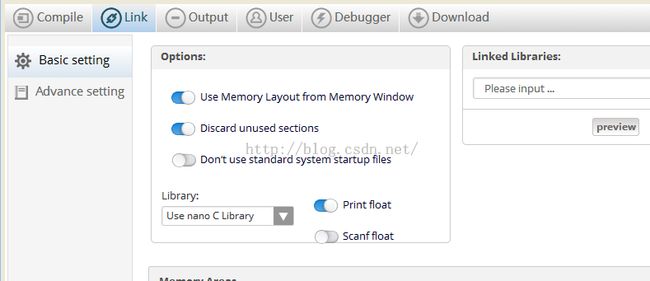
还要使能Print float选项,由于不再使用Retarget_printf组件,所以这里使用了标准的系统启动文件,同时把main.c文件中的_init()方法删掉了。
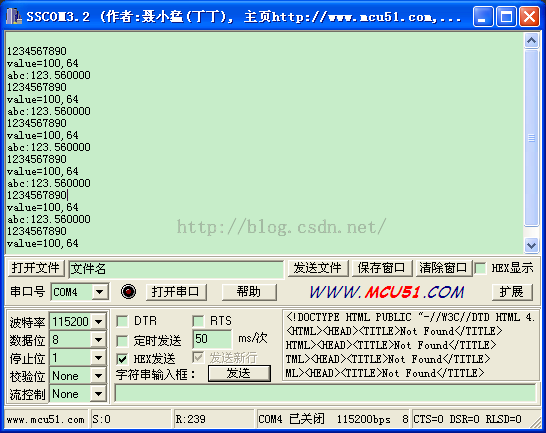
编辑主函数测试代码:
while (1)
{
printf("\r\n1234567890");
printf("\r\nvalue=%d,%X",100,100);
printf("\r\nabc:%f",123.56);
HAL_Delay(500);
}下载到目标板,运行,测试正常
至此,可以很方便地调试代码啦!