Camera显示之Hal层的适配(二)
接着上一篇:
Camera显示之Hal层的适配(一)
一.基本关系
1.先来看看KTM hal层大概类图关系:
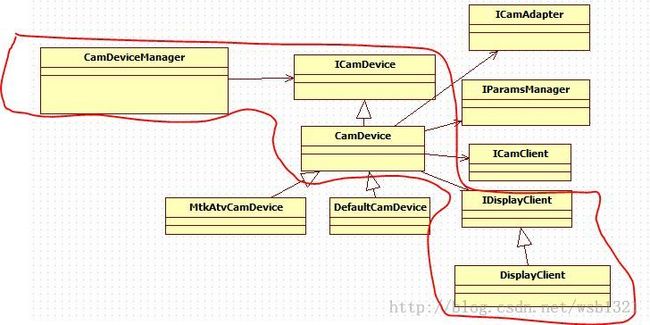
大概类图关系就是这样, 其中和显示相关的类图关系如红线所圈区域。
可以猜测到 与显示相关的逻辑处理应该都会在DisplayClient这个类去实现。

以后app下达有关预览显示相关的东西啊在hal层基本上都是这一条先进行传递命令, 不过总1中我们可以看到CamDevice还有一些衍生类, 这些都是mtk为不同设备做的一些定制, 主要的路径还是如上图所示。
二.接着之前的在CameraClient中的代码:
//!++
else if ( window == 0 ) {
result = mHardware->setPreviewWindow(window);
}
1.setPreviewWindow(window)通过CameraHardwareInterface适配:
mDevice->ops->set_preview_window(mDevice,
buf.get() ? &mHalPreviewWindow.nw : 0);
来实现向hal层下达命令和设置参数。
在这里我们发现传入的是mHalPreviewWindow.nw, 而不是我们之前所讲述的ANativeWindow 这是因为mHalPreviewWindow.nw将ANativeWindow的一些流的操作进行封装, 使之操作更加简便。
mHalPreviewWindow.nw的定义:
struct camera_preview_window {
struct preview_stream_ops nw;
void *user;
};
就是结构体:struct :
typedef struct preview_stream_ops {
int (*dequeue_buffer)(struct preview_stream_ops* w,
buffer_handle_t** buffer, int *stride);
int (*enqueue_buffer)(struct preview_stream_ops* w,
buffer_handle_t* buffer);
int (*cancel_buffer)(struct preview_stream_ops* w,
buffer_handle_t* buffer);
int (*set_buffer_count)(struct preview_stream_ops* w, int count);
int (*set_buffers_geometry)(struct preview_stream_ops* pw,
int w, int h, int format);
int (*set_crop)(struct preview_stream_ops *w,
int left, int top, int right, int bottom);
int (*set_usage)(struct preview_stream_ops* w, int usage);
int (*set_swap_interval)(struct preview_stream_ops *w, int interval);
int (*get_min_undequeued_buffer_count)(const struct preview_stream_ops *w,
int *count);
int (*lock_buffer)(struct preview_stream_ops* w,
buffer_handle_t* buffer);
// Timestamps are measured in nanoseconds, and must be comparable
// and monotonically increasing between two frames in the same
// preview stream. They do not need to be comparable between
// consecutive or parallel preview streams, cameras, or app runs.
int (*set_timestamp)(struct preview_stream_ops *w, int64_t timestamp);
对显示流的操作都是通过这些函数实现的,而mHalPreviewWindow中实现了具体操的方法, 在这些方法的实现中实现对作ANativeWindow的操作。 而在hal端就是通过mHalPreviewWindow.nw 进行对ANativeWindow的具体操作。
基本类图关系:
2.继续1中的:
mDevice->ops->set_preview_window(mDevice,
buf.get() ? &mHalPreviewWindow.nw : 0);
我已经知道了mHalPreviewWindow.nw为传入的一个重要参数mHalPreviewWindow.nw 为preview_stream_ops。
继续看看set_preview_window这个方法。 我们有上篇文章知道ops是ICamDevice的一个成员gCameraDevOps,类型为camera_device_ops_t:
可以看到:
static camera_device_ops_t const gCameraDevOps = {
set_preview_window: camera_set_preview_window,
set_callbacks: camera_set_callbacks,
enable_msg_type: camera_enable_msg_type,
disable_msg_type: camera_disable_msg_type,
msg_type_enabled: camera_msg_type_enabled,
start_preview: camera_start_preview,
stop_preview: camera_stop_preview,
preview_enabled: camera_preview_enabled,
store_meta_data_in_buffers: camera_store_meta_data_in_buffers,
start_recording: camera_start_recording,
stop_recording: camera_stop_recording,
recording_enabled: camera_recording_enabled,
release_recording_frame: camera_release_recording_frame,
auto_focus: camera_auto_focus,
cancel_auto_focus: camera_cancel_auto_focus,
take_picture: camera_take_picture,
cancel_picture: camera_cancel_picture,
set_parameters: camera_set_parameters,
get_parameters: camera_get_parameters,
put_parameters: camera_put_parameters,
send_command: camera_send_command,
release: camera_release,
dump: camera_dump,
};
gCameraDevOps 中的函数地址映射到ICamDevice中的函数实现。
所以 :ops->set_preview_window(mDevice, buf.get() ? &mHalPreviewWindow.nw : 0) 就对应到ICamDevice::camera_set_preview_window的发发调用。
static int camera_set_preview_window(
struct camera_device * device,
struct preview_stream_ops *window
)
{
int err = -EINVAL;
//
ICamDevice*const pDev = ICamDevice::getIDev(device);
if ( pDev )
{
err = pDev->setPreviewWindow(window);
}
//
return err;
}
static inline ICamDevice* getIDev(camera_device*const device)
{
return (NULL == device)
? NULL
: reinterpret_cast<ICamDevice*>(device->priv);//得到device->priv
由上篇文章:
知道device->pri实际上是在创建实例的时候指向的自己:
ICamDevice::
ICamDevice()
: camera_device_t()
, RefBase()
, mDevOps()
//
, mMtxLock()
//
{
MY_LOGD("ctor");
::memset(static_cast<camera_device_t*>(this), 0, sizeof(camera_device_t));
this->priv = this; //用priv指针保存自己。
this->ops = &mDevOps;//ops指向了mDevOps
mDevOps = gCameraDevOps;//mDevOps为gCameraDevOps指向的结构体
}
继续回到pDev->setPreviewWindow(window);
在ICamDevice中没有对setPreviewWindow具体的实现,而是在其子类CamDevice对ICamDevice进行了具体的实现;
随意代码定位到CamDevice:
status_t
CamDevice::
setPreviewWindow(preview_stream_ops* window)
{
MY_LOGI("+ window(%p)", window);
//
status_t status = initDisplayClient(window);//开始初始化DisplayClient
if ( OK == status && previewEnabled() && mpDisplayClient != 0 )
{
status = enableDisplayClient();//时能DisplayClient端
}
//
return status;
}
status_t
CamDevice::
initDisplayClient(preview_stream_ops* window)
{
#if '1'!=MTKCAM_HAVE_DISPLAY_CLIENT
#warning "Not Build Display Client"
MY_LOGD("Not Build Display Client");
..............
.............
/ [3.1] create a Display Client.
mpDisplayClient = IDisplayClient::createInstance();
if ( mpDisplayClient == 0 )
{
MY_LOGE("Cannot create mpDisplayClient");
status = NO_MEMORY;
goto lbExit;
}
// [3.2] initialize the newly-created Display Client.
if ( ! mpDisplayClient->init() )
{
MY_LOGE("mpDisplayClient init() failed");
mpDisplayClient->uninit();
mpDisplayClient.clear();
status = NO_MEMORY;
goto lbExit;
}
// [3.3] set preview_stream_ops & related window info.
if ( ! mpDisplayClient->setWindow(window, previewSize.width, previewSize.height, queryDisplayBufCount()) )//绑定window
{
status = INVALID_OPERATION;
goto lbExit;
}
// [3.4] set Image Buffer Provider Client if it exist.
if ( mpCamAdapter != 0 && ! mpDisplayClient->setImgBufProviderClient(mpCamAdapter) )//重要! 设置流数据的Buffer提供者。
{
status = INVALID_OPERATION;
goto lbExit;
}
..................
..................
status_t
CamDevice::
enableDisplayClient()
{
status_t status = OK;
Size previewSize;
//
// [1] Get preview size.
if ( ! queryPreviewSize(previewSize.width, previewSize.height) )
{
MY_LOGE("queryPreviewSize");
status = DEAD_OBJECT;
goto lbExit;
}
//
// [2] Enable
if ( ! mpDisplayClient->enableDisplay(previewSize.width, previewSize.height, queryDisplayBufCount(), mpCamAdapter) )//设置了预览数据的尺寸和Buffer提供者相关的数据
{
MY_LOGE("mpDisplayClient(%p)->enableDisplay()", mpDisplayClient.get());
status = INVALID_OPERATION;
goto lbExit;
}
//
status = OK;
lbExit:
return status;
}
3.定位到DisplayClient中:
enableDisplay(
int32_t const i4Width,
int32_t const i4Height,
int32_t const i4BufCount,
sp<IImgBufProviderClient>const& rpClient
)
{
bool ret = false;
preview_stream_ops* pStreamOps = mpStreamOps;
//
// [1] Re-configurate this instance if any setting changes.
if ( ! checkConfig(i4Width, i4Height, i4BufCount, rpClient) )
{
MY_LOGW("<Config Change> Uninit the current DisplayClient(%p) and re-config...", this);
//
// [.1] uninitialize
uninit();
//
// [.2] initialize
if ( ! init() )
{
MY_LOGE("re-init() failed");
goto lbExit;
}
//
// [.3] set related window info.
if ( ! setWindow(pStreamOps, i4Width, i4Height, i4BufCount) )//window的尺寸和预览数据的大小一致
{
goto lbExit;
}
//
// [.4] set Image Buffer Provider Client.
if ( ! setImgBufProviderClient(rpClient) )//Buffer的数据提供者为mpCamAdapter, 就是CamAdapter, 后面的预览数据元都是通过它来提供。
{
goto lbExit;
}
}
//
// [2] Enable.
if ( ! enableDisplay() )//开始进行数据的获取和显示
{
goto lbExit;
}
//
ret = true;
lbExit:
return ret;
}
先来看看第一个关键函数:setWindow(pStreamOps, i4Width, i4Height, i4BufCount)
bool
DisplayClient::
setWindow(
preview_stream_ops*const window,
int32_t const wndWidth,
int32_t const wndHeight,
int32_t const i4MaxImgBufCount
)
{
MY_LOGI("+ window(%p), WxH=%dx%d, count(%d)", window, wndWidth, wndHeight, i4MaxImgBufCount);
//
if ( ! window )
{
MY_LOGE("NULL window passed into");
return false;
}
//
if ( 0 >= wndWidth || 0 >= wndHeight || 0 >= i4MaxImgBufCount )
{
MY_LOGE("bad arguments - WxH=%dx%d, count(%d)", wndWidth, wndHeight, i4MaxImgBufCount);
return false;
}
//
//
Mutex::Autolock _l(mModuleMtx);
return set_preview_stream_ops(window, wndWidth, wndHeight, i4MaxImgBufCount);//
}
ool
DisplayClient::
set_preview_stream_ops(
preview_stream_ops*const window,
int32_t const wndWidth,
int32_t const wndHeight,
int32_t const i4MaxImgBufCount
)
{
CamProfile profile(__FUNCTION__, "DisplayClient");
//
bool ret = false;
status_t err = 0;
int32_t min_undequeued_buf_count = 0;
//
// (2) Check
if ( ! mStreamBufList.empty() )
{
MY_LOGE(
"locked buffer count(%d)!=0, "
"callers must return all dequeued buffers, "
// "and then call cleanupQueue()"
, mStreamBufList.size()
);
dumpDebug(mStreamBufList, __FUNCTION__);
goto lbExit;
}
//
// (3) Sava info.
mpStreamImgInfo.clear();//mpStreamImgInfo封装的视屏数据流的基本信息。
mpStreamImgInfo = new ImgInfo(wndWidth, wndHeight, CAMERA_DISPLAY_FORMAT, CAMERA_DISPLAY_FORMAT_HAL, "Camera@Display");//设置了Stream的宽高和显示类型。
mpStreamOps = window;//mpStreamOps保存了上层传进来的对象指针。后面就通过它和显示方进行交互。
mi4MaxImgBufCount = i4MaxImgBufCount;
........................
........................
err = mpStreamOps->set_buffer_count(mpStreamOps, mi4MaxImgBufCount+min_undequeued_buf_count);
if ( err )
{
MY_LOGE("set_buffer_count failed: status[%s(%d)]", ::strerror(-err), -err);
if ( ENODEV == err )
{
MY_LOGD("Preview surface abandoned!");
mpStreamOps = NULL;
}
goto lbExit;
}
//
// (4.4) Set window geometry
err = mpStreamOps->set_buffers_geometry(//设置基本的流信息
mpStreamOps,
mpStreamImgInfo->mu4ImgWidth,
mpStreamImgInfo->mu4ImgHeight,
mpStreamImgInfo->mi4ImgFormat
);
通过 上面的代码片段和分析, 确定了上层传递下来的对象指针保存在mpStreamOps, 与显示相关的交互都将通过mpStreamOps来进行操作。 而mpStreamImgInfo封装了流数据的大小和格式等。
再来看看第二个关键函数:setImgBufProviderClient(rpClient):
bool
DisplayClient::
setImgBufProviderClient(sp<IImgBufProviderClient>const& rpClient)
{
bool ret = false;
//
MY_LOGD("+ ImgBufProviderClient(%p), mpImgBufQueue.get(%p)", rpClient.get(), mpImgBufQueue.get());
//
if ( rpClient == 0 )
{
MY_LOGE("NULL ImgBufProviderClient");
mpImgBufPvdrClient = NULL;
goto lbExit;
}
//
if ( mpImgBufQueue != 0 )
{
if ( ! rpClient->onImgBufProviderCreated(mpImgBufQueue) )//通知Provider端(Buffer数据提供者端),我这边已经建好Buffer队列, 后面你就填充数据到对应的Buffer供我使用。
{
goto lbExit;
}
mpImgBufPvdrClient = rpClient;//用mpImgBufPvdrClient保存provider的对象指针, 方便使用。
}
//
ret = true;
lbExit:
MY_LOGD("-");
return ret;
};
再来看看第三个关键函数 enableDisplay() :
bool
DisplayClient::
enableDisplay()
{
bool ret = false;
//
// (1) Lock
Mutex::Autolock _l(mModuleMtx);
//
MY_LOGD("+ isDisplayEnabled(%d), mpDisplayThread.get(%p)", isDisplayEnabled(), mpDisplayThread.get());
//
// (2) Check to see if it has been enabled.
if ( isDisplayEnabled() )
{
MY_LOGD("Display is already enabled");
ret = true;
goto lbExit;
}
//
// (3) Check to see if thread is alive.
if ( mpDisplayThread == 0 )
{
MY_LOGE("NULL mpDisplayThread");
goto lbExit;
}
//
// (4) Enable the flag.
::android_atomic_write(1, &mIsDisplayEnabled);
//
// (5) Post a command to wake up the thread.
mpDisplayThread->postCommand(Command(Command::eID_WAKEUP));//通知获取数据的线程开始运行
//
//
ret = true;
lbExit:
MY_LOGD("- ret(%d)", ret);
return ret;
}
bool
DisplayThread::
threadLoop()
{
Command cmd;
if ( getCommand(cmd) )
{
switch (cmd.eId)
{
case Command::eID_EXIT:
MY_LOGD("Command::%s", cmd.name());
break;
//
case Command::eID_WAKEUP://对应上面发送的命令
default:
if ( mpThreadHandler != 0 )
{
mpThreadHandler->onThreadLoop(cmd);//注意此处, mpThreadHandler就是DisplayClient(它继承了IDisplayThreadHandler),
}
else
{
MY_LOGE("cannot handle cmd(%s) due to mpThreadHandler==NULL", cmd.name());
}
break;
}
}
//
MY_LOGD("- mpThreadHandler.get(%p)", mpThreadHandler.get());
return true;
}
回到DisplayClient的onThreadLoop函数:
bool
DisplayClient::
onThreadLoop(Command const& rCmd)
{
// (0) lock Processor.
sp<IImgBufQueue> pImgBufQueue;
{
Mutex::Autolock _l(mModuleMtx);
pImgBufQueue = mpImgBufQueue;
if ( pImgBufQueue == 0 || ! isDisplayEnabled() )//判断显示相关的初始化是否完成和启动
{
MY_LOGW("pImgBufQueue.get(%p), isDisplayEnabled(%d)", pImgBufQueue.get(), isDisplayEnabled());
return true;
}
}
// (1) Prepare all TODO buffers.
if ( ! prepareAllTodoBuffers(pImgBufQueue) )//为pImgBufQueue添加空Buffer。
{
return true;
}
// (2) Start
if ( ! pImgBufQueue->startProcessor() )//开始获取数据
{
return true;
}
//
{
Mutex::Autolock _l(mStateMutex);
mState = eState_Loop;
mStateCond.broadcast();
}
//
// (3) Do until disabled.
while ( 1 )//进入无限循环
{
// (.1)
waitAndHandleReturnBuffers(pImgBufQueue);//等待pImgBufQueue中的数据,并送到显示端显示
// (.2) break if disabled.
if ( ! isDisplayEnabled() )
{
MY_LOGI("Display disabled");
break;
}
// (.3) re-prepare all TODO buffers, if possible,
// since some DONE/CANCEL buffers return.
prepareAllTodoBuffers(pImgBufQueue);//又重新准备Buffer。
}
//
// (4) Stop
pImgBufQueue->pauseProcessor();
pImgBufQueue->flushProcessor();
pImgBufQueue->stopProcessor();//停止数据获取
//
// (5) Cancel all un-returned buffers.
cancelAllUnreturnBuffers();//没有来得及显示额数据, 也取消掉。
//
{
Mutex::Autolock _l(mStateMutex);
mState = eState_Suspend;
mStateCond.broadcast();
}
//
return true;
}
上边这个代码片段对预览数据的处理就在waitAndHandleReturnBuffers(pImgBufQueue);中。
4.对waitAndHandleReturnBuffers(pImgBufQueue);进行分析:
bool
DisplayClient::
waitAndHandleReturnBuffers(sp<IImgBufQueue>const& rpBufQueue)
{
bool ret = false;
Vector<ImgBufQueNode> vQueNode;
//
MY_LOGD_IF((1<=miLogLevel), "+");
//
// (1) deque buffers from processor.
rpBufQueue->dequeProcessor(vQueNode);//从provider端(数据提供端)获取一个填充数据了的Buffer。
if ( vQueNode.empty() ) {
MY_LOGW("vQueNode.empty()");
goto lbExit;
}
// (2) handle buffers dequed from processor.
ret = handleReturnBuffers(vQueNode);//处理填充了数据的这个Buffer中的数据。
lbExit:
//
MY_LOGD_IF((2<=miLogLevel), "- ret(%d)", ret);
return ret;
}
看看handleReturnBuffers函数:
bool
DisplayClient::
handleReturnBuffers(Vector<ImgBufQueNode>const& rvQueNode)
{
/*
* Notes:
* For 30 fps, we just enque (display) the latest frame,
* and cancel the others.
* For frame rate > 30 fps, we should judge the timestamp here or source.
*/
// (1) determine the latest DONE buffer index to display; otherwise CANCEL.
int32_t idxToDisp = 0;
for ( idxToDisp = rvQueNode.size()-1; idxToDisp >= 0; idxToDisp--)
{
if ( rvQueNode[idxToDisp].isDONE() )
break;
}
if ( rvQueNode.size() > 1 )
{
MY_LOGW("(%d) display frame count > 1 --> select %d to display", rvQueNode.size(), idxToDisp);
}
//
// Show Time duration.
if ( 0 <= idxToDisp )
{
nsecs_t const _timestamp1 = rvQueNode[idxToDisp].getImgBuf()->getTimestamp();
mProfile_buffer_timestamp.pulse(_timestamp1);
nsecs_t const _msDuration_buffer_timestamp = ::ns2ms(mProfile_buffer_timestamp.getDuration());
mProfile_buffer_timestamp.reset(_timestamp1);
//
mProfile_dequeProcessor.pulse();
nsecs_t const _msDuration_dequeProcessor = ::ns2ms(mProfile_dequeProcessor.getDuration());
mProfile_dequeProcessor.reset();
//
MY_LOGD_IF(
(1<=miLogLevel), "+ %s(%lld) %s(%lld)",
(_msDuration_buffer_timestamp < 0 ) ? "time inversion!" : "", _msDuration_buffer_timestamp,
(_msDuration_dequeProcessor > 34) ? "34ms < Duration" : "", _msDuration_dequeProcessor
);
}
//
// (2) Lock
Mutex::Autolock _l(mModuleMtx);
//
// (3) Remove from List and enquePrvOps/cancelPrvOps, one by one.
int32_t const queSize = rvQueNode.size();
for (int32_t i = 0; i < queSize; i++)
{
sp<IImgBuf>const& rpQueImgBuf = rvQueNode[i].getImgBuf(); // ImgBuf in Queue.
sp<StreamImgBuf>const pStreamImgBuf = *mStreamBufList.begin(); // ImgBuf in List.
// (.1) Check valid pointers to image buffers in Queue & List
if ( rpQueImgBuf == 0 || pStreamImgBuf == 0 )
{
MY_LOGW("Bad ImgBuf:(Que[%d], List.begin)=(%p, %p)", i, rpQueImgBuf.get(), pStreamImgBuf.get());
continue;
}
// (.2) Check the equality of image buffers between Queue & List.
if ( rpQueImgBuf->getVirAddr() != pStreamImgBuf->getVirAddr() )
{
MY_LOGW("Bad address in ImgBuf:(Que[%d], List.begin)=(%p, %p)", i, rpQueImgBuf->getVirAddr(), pStreamImgBuf->getVirAddr());
continue;
}
// (.3) Every check is ok. Now remove the node from the list.
mStreamBufList.erase(mStreamBufList.begin());//经过检查返回的这一帧数据的Buffer是DisplayClient端分配和提供的。
//
// (.4) enquePrvOps/cancelPrvOps
if ( i == idxToDisp ) {
MY_LOGD_IF(
(1<=miLogLevel),
"Show frame:%d %d [ion:%d %p/%d %lld]",
i, rvQueNode[i].getStatus(), pStreamImgBuf->getIonFd(),
pStreamImgBuf->getVirAddr(), pStreamImgBuf->getBufSize(), pStreamImgBuf->getTimestamp()
);
//
if(mpExtImgProc != NULL)
{
if(mpExtImgProc->getImgMask() & ExtImgProc::BufType_Display)
{
IExtImgProc::ImgInfo img;
//
img.bufType = ExtImgProc::BufType_Display;
img.format = pStreamImgBuf->getImgFormat();
img.width = pStreamImgBuf->getImgWidth();
img.height = pStreamImgBuf->getImgHeight();
img.stride[0] = pStreamImgBuf->getImgWidthStride(0);
img.stride[1] = pStreamImgBuf->getImgWidthStride(1);
img.stride[2] = pStreamImgBuf->getImgWidthStride(2);
img.virtAddr = (MUINT32)(pStreamImgBuf->getVirAddr());
img.bufSize = pStreamImgBuf->getBufSize();
//
mpExtImgProc->doImgProc(img);
}
}
//
enquePrvOps(pStreamImgBuf);//送入显示端显示
}
else {
MY_LOGW(
"Drop frame:%d %d [ion:%d %p/%d %lld]",
i, rvQueNode[i].getStatus(), pStreamImgBuf->getIonFd(),
pStreamImgBuf->getVirAddr(), pStreamImgBuf->getBufSize(), pStreamImgBuf->getTimestamp()
);
cancelPrvOps(pStreamImgBuf);
}
}
//
MY_LOGD_IF((1<=miLogLevel), "-");
return true;
}
void
DisplayClient::
enquePrvOps(sp<StreamImgBuf>const& rpImgBuf)
{
mProfile_enquePrvOps.pulse();
if ( mProfile_enquePrvOps.getDuration() >= ::s2ns(2) ) {
mProfile_enquePrvOps.updateFps();
mProfile_enquePrvOps.showFps();
mProfile_enquePrvOps.reset();
}
//
status_t err = 0;
//
CamProfile profile(__FUNCTION__, "DisplayClient");
profile.print_overtime(
((1<=miLogLevel) ? 0 : 1000),
"+ locked buffer count(%d), rpImgBuf(%p,%p), Timestamp(%lld)",
mStreamBufList.size(), rpImgBuf.get(), rpImgBuf->getVirAddr(), rpImgBuf->getTimestamp()
);
//
// [1] unlock buffer before sending to display
GraphicBufferMapper::get().unlock(rpImgBuf->getBufHndl());
profile.print_overtime(1, "GraphicBufferMapper::unlock");
//
// [2] Dump image if wanted.
dumpImgBuf_If(rpImgBuf);
//
// [3] set timestamp.
err = mpStreamOps->set_timestamp(mpStreamOps, rpImgBuf->getTimestamp());
profile.print_overtime(2, "mpStreamOps->set_timestamp, Timestamp(%lld)", rpImgBuf->getTimestamp());
if ( err )
{
MY_LOGE(
"mpStreamOps->set_timestamp failed: status[%s(%d)], rpImgBuf(%p), Timestamp(%lld)",
::strerror(-err), -err, rpImgBuf.get(), rpImgBuf->getTimestamp()
);
}
//
// [4] set gralloc buffer type & dirty
::gralloc_extra_setBufParameter(
rpImgBuf->getBufHndl(),
GRALLOC_EXTRA_MASK_TYPE | GRALLOC_EXTRA_MASK_DIRTY,
GRALLOC_EXTRA_BIT_TYPE_CAMERA | GRALLOC_EXTRA_BIT_DIRTY
);
//
// [5] unlocks and post the buffer to display.
err = mpStreamOps->enqueue_buffer(mpStreamOps, rpImgBuf->getBufHndlPtr());//注意这里可以看到最终是通过mpStreamOps送入送给显示端显示的。
profile.print_overtime(10, "mpStreamOps->enqueue_buffer, Timestamp(%lld)", rpImgBuf->getTimestamp());
if ( err )
{
MY_LOGE(
"mpStreamOps->enqueue_buffer failed: status[%s(%d)], rpImgBuf(%p,%p)",
::strerror(-err), -err, rpImgBuf.get(), rpImgBuf->getVirAddr()
);
}
}
从上面的代码片段, 可以看到从显示数据最终是通过mpStreamOps(CameraHardwareInterface中传下来的的mHalPreviewWindow.nw)来进行处理的。
至此预览数据就算完全交给了ANativeWindow进行显示。
但是预览数据究竟是怎样从Provider端来的, 我们也提到在DisplayClient也会去分配一些buffer, 这些Buffer又是如何管理的。 后续会接着分享。