linux字符驱动之定时器去抖动按键驱动
上一节里,实现同一时刻只能有一个进程使用同一个设备,例如:只能有一个进程,在同一时刻里使用/dev/buttons这个设备。
上一节文章链接:http://blog.csdn.net/lwj103862095/article/details/17563953
相信大家在写单片机的按键程序时,也必将会涉及一点,就去按键去抖动。按键去抖动的方法无非有二种,一种是硬件电路去抖动,这种在要求不是特别高的情况下是不会被采用的;另一种就是延时去抖动了。而延时又一般分为二种,一种是for循环死等待,一种是定时延时。对,这一节里我们来使用内核的定时器去抖动。
问:linux内核定时器有哪些要素?
答:有两个要素:
一、超时时间
二、处理函数
问:linux定时器结构是怎样的?
答:
struct timer_list {
struct list_head entry;
unsigned long expires;
void (*function)(unsigned long);
unsigned long data;
struct tvec_base *base;
.....
};
问:void (*function)(unsigned long data)里面的参数是谁传给它的?
答:是timer_list.data传给它的,如果需要向function传递参数时,则应该设置timer_list.data,否则可以不设置。
问:与定时器相关的操作函数有哪些?
答:
一、使用init_timer函数初始化定时器
二、设置timer_list.function,并实现这个函数指针
三、使用add_timer函数向内核注册一个定时器
四、使用mod_timer修改定时器时间,并启动定时器
问:int mod_timer(struct timer_list *timer, unsigned long expires)的第二个参数为超时时间,怎么设置超时时间,如果定时为10ms?
答:一般的形式为: jiffies + (HZ /100),HZ 表示100个jiffies,jiffies的单位为10ms,即HZ = 100*10ms = 1s
详细请参考驱动源码:
#include <linux/kernel.h>
#include <linux/fs.h>
#include <linux/init.h>
#include <linux/delay.h>
#include <linux/irq.h>
#include <asm/uaccess.h>
#include <asm/irq.h>
#include <asm/io.h>
#include <linux/module.h>
#include <linux/device.h> //class_create
#include <mach/regs-gpio.h> //S3C2410_GPF1
//#include <asm/arch/regs-gpio.h>
#include <mach/hardware.h>
//#include <asm/hardware.h>
#include <linux/interrupt.h> //wait_event_interruptible
#include <linux/poll.h> //poll
#include <linux/fcntl.h>
/* 定义并初始化等待队列头 */
static DECLARE_WAIT_QUEUE_HEAD(button_waitq);
static struct class *sixthdrv_class;
static struct device *sixthdrv_device;
static struct pin_desc{
unsigned int pin;
unsigned int key_val;
};
static struct pin_desc pins_desc[4] = {
{S3C2410_GPF1,0x01},
{S3C2410_GPF4,0x02},
{S3C2410_GPF2,0x03},
{S3C2410_GPF0,0x04},
};
struct pin_desc *irq_pindes;
static int ev_press = 0;
/* 键值: 按下时, 0x01, 0x02, 0x03, 0x04 */
/* 键值: 松开时, 0x81, 0x82, 0x83, 0x84 */
static unsigned char key_val;
int major;
static struct fasync_struct *button_fasync;
static struct timer_list buttons_timer; /* 定义一个定时器结构体 */
#if 0
static atomic_t canopen = ATOMIC_INIT(1); //定义原子变量canopen并初始化为1
#endif
static DECLARE_MUTEX(button_lock); //定义互斥锁
/* 用户中断处理函数 */
static irqreturn_t buttons_irq(int irq, void *dev_id)
{
int ret;
irq_pindes = (struct pin_desc *)dev_id;
/* 修改定时器定时时间,定时10ms,即10秒后启动定时器
* HZ 表示100个jiffies,jiffies的单位为10ms,即HZ = 100*10ms = 1s
* 这里HZ/100即定时10ms
*/
ret = mod_timer(&buttons_timer, jiffies + (HZ /100));
if(ret == 1)
{
printk("mod timer success\n");
}
return IRQ_HANDLED;
}
static int sixth_drv_open(struct inode * inode, struct file * filp)
{
#if 0
/* 自减操作后测试其是否为0,为0则返回true,否则返回false */
if(!atomic_dec_and_test(&canopen))
{
atomic_inc(&canopen); //原子变量增加1
return -EBUSY;
}
#endif
/* 当打开的文件有O_NONBLOCK标记时,表示不阻塞 */
if(filp->f_flags & O_NONBLOCK)
{
/* 尝试获取button_lock信号量,当获取不到时立即返回 */
if (down_trylock(&button_lock))
return -EBUSY;
}
else
{
/* 获取button_lock信号量,当获取不到时,将会休眠
* 但是这种休眠是不可以被中断打断的
*/
down(&button_lock);
}
/* K1 ---- EINT1,K2 ---- EINT4,K3 ---- EINT2,K4 ---- EINT0
* 配置GPF1、GPF4、GPF2、GPF0为相应的外部中断引脚
* IRQT_BOTHEDGE应该改为IRQ_TYPE_EDGE_BOTH
*/
request_irq(IRQ_EINT1, buttons_irq, IRQ_TYPE_EDGE_BOTH, "K1",&pins_desc[0]);
request_irq(IRQ_EINT4, buttons_irq, IRQ_TYPE_EDGE_BOTH, "K2",&pins_desc[1]);
request_irq(IRQ_EINT2, buttons_irq, IRQ_TYPE_EDGE_BOTH, "K3",&pins_desc[2]);
request_irq(IRQ_EINT0, buttons_irq, IRQ_TYPE_EDGE_BOTH, "K4",&pins_desc[3]);
return 0;
}
static ssize_t sixth_drv_read(struct file *file, char __user *user, size_t size,loff_t *ppos)
{
if (size != 1)
return -EINVAL;
/* 当打开的文件有O_NONBLOCK标记时,表示不阻塞 */
if(file->f_flags & O_NONBLOCK)
{
/* 当ev_press = 0时,表示没有按键被按下,即表示没有数据 */
if(!ev_press)
return -EAGAIN;
}
else
{
/* 当没有按键按下时,休眠。
* 即ev_press = 0;
* 当有按键按下时,发生中断,在中断处理函数会唤醒
* 即ev_press = 1;
* 唤醒后,接着继续将数据通过copy_to_user函数传递给应用程序
*/
wait_event_interruptible(button_waitq, ev_press);
}
copy_to_user(user, &key_val, 1);
/* 将ev_press清零 */
ev_press = 0;
return 1;
}
static int sixth_drv_close(struct inode *inode, struct file *file)
{
#if 0
atomic_inc(&canopen); //原子变量增加1
#endif
free_irq(IRQ_EINT1,&pins_desc[0]);
free_irq(IRQ_EINT4,&pins_desc[1]);
free_irq(IRQ_EINT2,&pins_desc[2]);
free_irq(IRQ_EINT0,&pins_desc[3]);
/* 释放信号量 */
up(&button_lock);
return 0;
}
static unsigned int sixth_drv_poll(struct file *file, poll_table *wait)
{
unsigned int mask = 0;
/* 该函数,只是将进程挂在button_waitq队列上,而不是立即休眠 */
poll_wait(file, &button_waitq, wait);
/* 当没有按键按下时,即不会进入按键中断处理函数,此时ev_press = 0
* 当按键按下时,就会进入按键中断处理函数,此时ev_press被设置为1
*/
if(ev_press)
{
mask |= POLLIN | POLLRDNORM; /* 表示有数据可读 */
}
/* 如果有按键按下时,mask |= POLLIN | POLLRDNORM,否则mask = 0 */
return mask;
}
/* 当应用程序调用了fcntl(fd, F_SETFL, Oflags | FASYNC);
* 则最终会调用驱动的fasync函数,在这里则是sixth_drv_fasync
* sixth_drv_fasync最终又会调用到驱动的fasync_helper函数
* fasync_helper函数的作用是初始化/释放fasync_struct
*/
static int sixth_drv_fasync(int fd, struct file *filp, int on)
{
return fasync_helper(fd, filp, on, &button_fasync);
}
/* File operations struct for character device */
static const struct file_operations sixth_drv_fops = {
.owner = THIS_MODULE,
.open = sixth_drv_open,
.read = sixth_drv_read,
.release = sixth_drv_close,
.poll = sixth_drv_poll,
.fasync = sixth_drv_fasync,
};
/* 定时器处理函数 */
static void buttons_timer_function(unsigned long data)
{
struct pin_desc *pindesc = irq_pindes;
unsigned int pinval;
pinval = s3c2410_gpio_getpin(pindesc->pin);
if(pinval)
{
/* 松开 */
key_val = 0x80 | (pindesc->key_val);
}
else
{
/* 按下 */
key_val = pindesc->key_val;
}
ev_press = 1; /* 表示中断已经发生 */
wake_up_interruptible(&button_waitq); /* 唤醒休眠的进程 */
/* 用kill_fasync函数告诉应用程序,有数据可读了
* button_fasync结构体里包含了发给谁(PID指定)
* SIGIO表示要发送的信号类型
* POLL_IN表示发送的原因(有数据可读了)
*/
kill_fasync(&button_fasync, SIGIO, POLL_IN);
}
/* 驱动入口函数 */
static int sixth_drv_init(void)
{
/* 初始化定时器 */
init_timer(&buttons_timer);
/* 当定时时间到达时uttons_timer_function就会被调用 */
buttons_timer.function = buttons_timer_function;
/* 向内核注册一个定时器 */
add_timer(&buttons_timer);
/* 主设备号设置为0表示由系统自动分配主设备号 */
major = register_chrdev(0, "sixth_drv", &sixth_drv_fops);
/* 创建sixthdrv类 */
sixthdrv_class = class_create(THIS_MODULE, "sixthdrv");
/* 在sixthdrv类下创建buttons设备,供应用程序打开设备*/
sixthdrv_device = device_create(sixthdrv_class, NULL, MKDEV(major, 0), NULL, "buttons");
return 0;
}
/* 驱动出口函数 */
static void sixth_drv_exit(void)
{
unregister_chrdev(major, "sixth_drv");
device_unregister(sixthdrv_device); //卸载类下的设备
class_destroy(sixthdrv_class); //卸载类
}
module_init(sixth_drv_init); //用于修饰入口函数
module_exit(sixth_drv_exit); //用于修饰出口函数
MODULE_AUTHOR("LWJ");
MODULE_DESCRIPTION("Just for Demon");
MODULE_LICENSE("GPL"); //遵循GPL协议
应用测试程序源码:
#include <stdio.h>
#include <sys/types.h>
#include <sys/stat.h>
#include <fcntl.h>
#include <unistd.h> //sleep
#include <poll.h>
#include <signal.h>
#include <fcntl.h>
/* buttons_all_test
*/
int main(int argc ,char *argv[])
{
int fd;
unsigned char key_val;
fd = open("/dev/buttons",O_RDWR); /* 以阻塞方式读 */
if (fd < 0)
{
printf("open error\n");
return -1;
}
while(1)
{
int ret =read(fd,&key_val,1);
printf("key_val: 0x%x, ret = %d\n", key_val, ret);
//sleep(3);
}
return 0;
}
测试步骤:
[WJ2440]# ls
Qt fourth_drv.ko sixth_drv.ko
TQLedtest fourth_test sixth_test
app_test home sixthdrvtest
bin lib sys
buttons_all_drv.ko linuxrc third_drv.ko
buttons_all_test mnt third_test
dev opt tmp
driver_test proc udisk
etc root usr
fifth_drv.ko sbin var
fifth_test sddisk web
first_drv.ko second_drv.ko
first_test second_test
[WJ2440]# insmod buttons_all_drv.ko
[WJ2440]# lsmod
buttons_all_drv 3936 0 - Live 0xbf000000
[WJ2440]# ls /dev/buttons -l
crw-rw---- 1 root root 252, 0 Jan 2 05:43 /dev/buttons
[WJ2440]# ./buttons_all_test
key_val: 0x1, ret = 1
key_val: 0x81, ret = 1
key_val: 0x1, ret = 1
key_val: 0x81, ret = 1
key_val: 0x4, ret = 1
key_val: 0x84, ret = 1
key_val: 0x2, ret = 1
key_val: 0x82, ret = 1
key_val: 0x3, ret = 1
key_val: 0x83, ret = 1
key_val: 0x2, ret = 1
key_val: 0x82, ret = 1
key_val: 0x2, ret = 1
key_val: 0x82, ret = 1
key_val: 0x2, ret = 1
key_val: 0x82, ret = 1
key_val: 0x2, ret = 1
key_val: 0x82, ret = 1
key_val: 0x2, ret = 1
key_val: 0x82, ret = 1
key_val: 0x2, ret = 1
key_val: 0x82, ret = 1
key_val: 0x2, ret = 1
key_val: 0x82, ret = 1
key_val: 0x2, ret = 1
key_val: 0x82, ret = 1
key_val: 0x2, ret = 1
key_val: 0x82, ret = 1
key_val: 0x2, ret = 1
key_val: 0x82, ret = 1
key_val: 0x2, ret = 1
key_val: 0x82, ret = 1
key_val: 0x2, ret = 1
key_val: 0x82, ret = 1
key_val: 0x2, ret = 1
key_val: 0x82, ret = 1
key_val: 0x2, ret = 1
key_val: 0x82, ret = 1
key_val: 0x2, ret = 1
key_val: 0x82, ret = 1
key_val: 0x2, ret = 1
key_val: 0x82, ret = 1
key_val: 0x2, ret = 1
key_val: 0x82, ret = 1
key_val: 0x2, ret = 1
key_val: 0x82, ret = 1
key_val: 0x2, ret = 1
key_val: 0x82, ret = 1
key_val: 0x2, ret = 1
key_val: 0x82, ret = 1
key_val: 0x2, ret = 1
key_val: 0x82, ret = 1
key_val: 0x2, ret = 1
key_val: 0x82, ret = 1
[WJ2440]# ./buttons_all_test &
[WJ2440]# top
Mem: 9996K used, 50168K free, 0K shrd, 0K buff, 7180K cached
CPU: 0.3% usr 0.5% sys 0.0% nic 99.0% idle 0.0% io 0.0% irq 0.0% sirq
Load average: 0.02 0.05 0.01 1/23 604
PID PPID USER STAT VSZ %MEM CPU %CPU COMMAND
604 589 root R 2092 3.4 0 0.9 top
589 1 root S 2092 3.4 0 0.0 -/bin/sh
1 0 root S 2088 3.4 0 0.0 init
590 1 root S 2088 3.4 0 0.0 /usr/sbin/telnetd -l /bin/login
587 1 root S 1508 2.5 0 0.0 EmbedSky_wdg
603 589 root S 1428 2.3 0 0.0 ./buttons_all_test
573 2 root SW< 0 0.0 0 0.0 [rpciod/0]
5 2 root SW< 0 0.0 0 0.0 [khelper]
329 2 root SW< 0 0.0 0 0.0 [nfsiod]
2 0 root SW< 0 0.0 0 0.0 [kthreadd]
4 2 root SW< 0 0.0 0 0.0 [events/0]
3 2 root SW< 0 0.0 0 0.0 [ksoftirqd/0]
11 2 root SW< 0 0.0 0 0.0 [async/mgr]
237 2 root SW< 0 0.0 0 0.0 [kblockd/0]
247 2 root SW< 0 0.0 0 0.0 [khubd]
254 2 root SW< 0 0.0 0 0.0 [kmmcd]
278 2 root SW 0 0.0 0 0.0 [pdflush]
279 2 root SW 0 0.0 0 0.0 [pdflush]
280 2 root SW< 0 0.0 0 0.0 [kswapd0]
325 2 root SW< 0 0.0 0 0.0 [aio/0]
由测试结果可知,无论按多少次,按键都是成对出现的,即按下、松开;按下、松开;按下、松开,而不会出现按下、按下、按下、松开这种抖动情况,这就完成了定时器消抖动的目的。
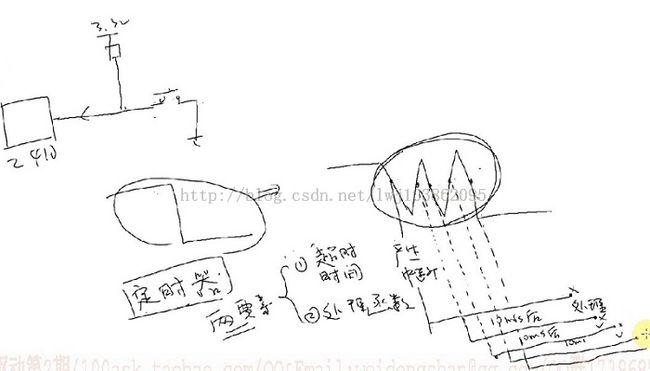
这里贴一张韦老师的定时器消抖动的按键分析图:
上一节文章链接:http://blog.csdn.net/lwj103862095/article/details/17563953