Linux设备模型――设备驱动模型和sysfs文件系统解读
转载自 http://blog.csdn.net/yj4231/article/details/7799245 作者:yj4231
本文将对Linux系统中的sysfs进行简单的分析,要分析sysfs就必须分析内核的driver-model(驱动模型),两者是紧密联系的。在分析过程中,本文将以platform总线和spi主控制器的platform驱动为例来进行讲解。其实,platform机制是基于driver-model的,通过本文,也会对platform机制有个简单的了解。
内核版本:2.6.30
1. What is sysfs?
个人理解:sysfs向用户空间展示了驱动设备的层次结构。我们都知道设备和对应的驱动都是由内核管理的,这些对于用户空间是不可见的。现在通过sysfs,可以在用户空间直观的了解设备驱动的层次结构。
我们来看看sysfs的文件结构:
[root@yj423 /sys]#ls
block class devices fs module
bus dev firmware kernel power
block:块设备
bus:系统中的总线
class: 设备类型,比如输入设备
dev:系统中已注册的设备节点的视图,有两个子目录char和block。
devices:系统中所有设备拓扑结构视图
fireware:固件
fs:文件系统
kernel:内核配置选项和状态信息
module:模块
power:系统的电源管理数据
2. kobject ,kset和ktype
要分析sysfs,首先就要分析kobject和kset,因为驱动设备的层次结构的构成就是由这两个东东来完成的。
2.1 kobject
kobject是一个对象的抽象,它用于管理对象。每个kobject对应着sysfs中的一个目录。
kobject用struct kobject来描述。
struct kobject {
const char *name; /*在sysfs建立目录的名字*/
struct list_head entry; /*用于连接到所属kset的链表中*/
struct kobject *parent; /*父对象*/
struct kset *kset; /*属于哪个kset*/
struct kobj_type *ktype; /*类型*/
struct sysfs_dirent *sd; /*sysfs中与该对象对应的文件节点*/
struct kref kref; /*对象的应用计数*/
unsigned int state_initialized:1;
unsigned int state_in_sysfs:1;
unsigned int state_add_uevent_sent:1;
unsigned int state_remove_uevent_sent:1;
unsigned int uevent_suppress:1;
};
2.2 kset
kset是一些kobject的集合,这些kobject可以有相同的ktype,也可以不同。同时,kset自己也包含一个kobject。在sysfs中,kset也是对应这一个目录,但是目录下面包含着其他的kojbect。
kset使用struct kset来描述。
/**
* struct kset - a set of kobjects of a specific type, belonging to a specific subsystem.
*
* A kset defines a group of kobjects. They can be individually
* different "types" but overall these kobjects all want to be grouped
* together and operated on in the same manner. ksets are used to
* define the attribute callbacks and other common events that happen to
* a kobject.
*
* @list: the list of all kobjects for this kset
* @list_lock: a lock for iterating over the kobjects
* @kobj: the embedded kobject for this kset (recursion, isn't it fun...)
* @uevent_ops: the set of uevent operations for this kset. These are
* called whenever a kobject has something happen to it so that the kset
* can add new environment variables, or filter out the uevents if so
* desired.
*/
struct kset {
struct list_head list; /*属于该kset的kobject链表*/
spinlock_t list_lock;
struct kobject kobj; /*该kset内嵌的kobj*/
struct kset_uevent_ops *uevent_ops;
};
2.3 ktype
每个kobject对象都内嵌有一个ktype,该结构定义了kobject在创建和删除时所采取的行为。
struct kobj_type {
void (*release)(struct kobject *kobj);
struct sysfs_ops *sysfs_ops;
struct attribute **default_attrs;
};
struct sysfs_ops {
ssize_t (*show)(struct kobject *, struct attribute *,char *);
ssize_t (*store)(struct kobject *,struct attribute *,const char *, size_t);
};
/* FIXME
* The *owner field is no longer used.
* x86 tree has been cleaned up. The owner
* attribute is still left for other arches.
*/
struct attribute {
const char *name;
struct module *owner;
mode_t mode;
};
当kobject的引用计数为0时,通过release方法来释放相关的资源。
attribute为属性,每个属性在sysfs中都有对应的属性文件。
sysfs_op的两个方法用于实现读取和写入属性文件时应该采取的行为。
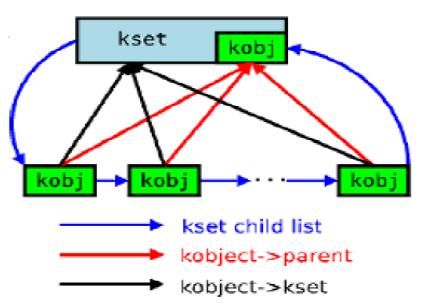
2.4 kobject与kset的关系
下面这张图非常经典。最下面的kobj都属于一个kset,同时这些kobj的父对象就是kset内嵌的kobj。通过链表,kset可以获取所有属于它的kobj。
从sysfs角度而言,kset代表一个文件夹,而下面的kobj就是这个文件夹里面的内容,而内容有可能是文件也有可能是文件夹。
3.举例
在上一节中,我们知道sys下有一个bus目录,这一将分析如何通过kobject创建bus目录。
下面代码位于drivers/base/bus.c
int __init buses_init(void)
{
bus_kset = kset_create_and_add("bus", &bus_uevent_ops, NULL);
if (!bus_kset)
return -ENOMEM;
return 0;
}
static struct kset_uevent_ops bus_uevent_ops = {
.filter = bus_uevent_filter,
};
static int bus_uevent_filter(struct kset *kset, struct kobject *kobj)
{
struct kobj_type *ktype = get_ktype(kobj);
if (ktype == &bus_ktype)
return 1;
return 0;
}
这里直接调用kset_create_and_add,第一个参数为要创建的目录的名字,而第三个参数表示没有父对象。
下面代码位于drivers/base/kobject.c
/**
* kset_create_and_add - create a struct kset dynamically and add it to sysfs
*
* @name: the name for the kset
* @uevent_ops: a struct kset_uevent_ops for the kset
* @parent_kobj: the parent kobject of this kset, if any.
*
* This function creates a kset structure dynamically and registers it
* with sysfs. When you are finished with this structure, call
* kset_unregister() and the structure will be dynamically freed when it
* is no longer being used.
*
* If the kset was not able to be created, NULL will be returned.
*/
struct kset *kset_create_and_add(const char *name,
struct kset_uevent_ops *uevent_ops,
struct kobject *parent_kobj)
{
struct kset *kset;
int error;
kset = kset_create(name, uevent_ops, parent_kobj); /*建立kset,设置某些字段*/
if (!kset)
return NULL;
error = kset_register(kset); /*添加kset到sysfs*/
if (error) {
kfree(kset);
return NULL;
}
return kset;
}
这里主要调用了两个函数,接下分别来看下。
3.1 kset_create函数
下面代码位于drivers/base/kobject.c
/**
* kset_create - create a struct kset dynamically
*
* @name: the name for the kset
* @uevent_ops: a struct kset_uevent_ops for the kset
* @parent_kobj: the parent kobject of this kset, if any.
*
* This function creates a kset structure dynamically. This structure can
* then be registered with the system and show up in sysfs with a call to
* kset_register(). When you are finished with this structure, if
* kset_register() has been called, call kset_unregister() and the
* structure will be dynamically freed when it is no longer being used.
*
* If the kset was not able to be created, NULL will be returned.
*/
static struct kset *kset_create(const char *name,
struct kset_uevent_ops *uevent_ops,
struct kobject *parent_kobj)
{
struct kset *kset;
kset = kzalloc(sizeof(*kset), GFP_KERNEL);/*分配kset*/
if (!kset)
return NULL;
kobject_set_name(&kset->kobj, name);/*设置kobj->name*/
kset->uevent_ops = uevent_ops;
kset->kobj.parent = parent_kobj; /*设置父对象*/
/*
* The kobject of this kset will have a type of kset_ktype and belong to
* no kset itself. That way we can properly free it when it is
* finished being used.
*/
kset->kobj.ktype = &kset_ktype;
kset->kobj.kset = NULL; /*本keset不属于任何kset*/
return kset;
}
这个函数中,动态分配了kset结构,调用kobject_set_name设置kset->kobj->name为bus,也就是我们要创建的目录bus。同时这里kset->kobj.parent为NULL,
也就是没有父对象。因为要创建的bus目录是在sysfs所在的根目录创建的,自然没有父对象。
随后简要看下由kobject_set_name函数调用引发的一系列调用。
/**
* kobject_set_name - Set the name of a kobject
* @kobj: struct kobject to set the name of
* @fmt: format string used to build the name
*
* This sets the name of the kobject. If you have already added the
* kobject to the system, you must call kobject_rename() in order to
* change the name of the kobject.
*/
int kobject_set_name(struct kobject *kobj, const char *fmt, ...)
{
va_list vargs;
int retval;
va_start(vargs, fmt);
retval = kobject_set_name_vargs(kobj, fmt, vargs);
va_end(vargs);
return retval;
}
/**
* kobject_set_name_vargs - Set the name of an kobject
* @kobj: struct kobject to set the name of
* @fmt: format string used to build the name
* @vargs: vargs to format the string.
*/
int kobject_set_name_vargs(struct kobject *kobj, const char *fmt,
va_list vargs)
{
const char *old_name = kobj->name;
char *s;
if (kobj->name && !fmt)
return 0;
kobj->name = kvasprintf(GFP_KERNEL, fmt, vargs);
if (!kobj->name)
return -ENOMEM;
/* ewww... some of these buggers have '/' in the name ... */
while ((s = strchr(kobj->name, '/')))
s[0] = '!';
kfree(old_name);
return 0;
}
/* Simplified asprintf. */
char *kvasprintf(gfp_t gfp, const char *fmt, va_list ap)
{
unsigned int len;
char *p;
va_list aq;
va_copy(aq, ap);
len = vsnprintf(NULL, 0, fmt, aq);
va_end(aq);
p = kmalloc(len+1, gfp);
if (!p)
return NULL;
vsnprintf(p, len+1, fmt, ap);
return p;
}
3.2 kset_register
下面代码位于drivers/base/kobject.c。
/**
* kset_register - initialize and add a kset.
* @k: kset.
*/
int kset_register(struct kset *k)
{
int err;
if (!k)
return -EINVAL;
kset_init(k); /*初始化kset*/
err = kobject_add_internal(&k->kobj); /*在sysfs中建立目录*/
if (err)
return err;
kobject_uevent(&k->kobj, KOBJ_ADD);
return 0;
}
这里面调用了3个函数。这里先介绍前两个函数。
3.2.1 kset_init
该函数用于初始化kset。
下面代码位于drivers/base/kobject.c。
/**
* kset_init - initialize a kset for use
* @k: kset
*/
void kset_init(struct kset *k)
{
kobject_init_internal(&k->kobj);/*初始化kobject的某些字段*/
INIT_LIST_HEAD(&k->list); /*初始化链表头*/
spin_lock_init(&k->list_lock); /*初始化自旋锁*/
}
static void kobject_init_internal(struct kobject *kobj)
{
if (!kobj)
return;
kref_init(&kobj->kref); /*初始化引用基计数*/
INIT_LIST_HEAD(&kobj->entry); /*初始化链表头*/
kobj->state_in_sysfs = 0;
kobj->state_add_uevent_sent = 0;
kobj->state_remove_uevent_sent = 0;
kobj->state_initialized = 1;
}
3.2.2 kobject_add_internal
该函数将在sysfs中建立目录。
下面代码位于drivers/base/kobject.c。
static int kobject_add_internal(struct kobject *kobj)
{
int error = 0;
struct kobject *parent;
if (!kobj)
return -ENOENT;
/*检查name字段是否存在*/
if (!kobj->name || !kobj->name[0]) {
WARN(1, "kobject: (%p): attempted to be registered with empty "
"name!\n", kobj);
return -EINVAL;
}
parent = kobject_get(kobj->parent); /*有父对象则增加父对象引用计数*/
/* join kset if set, use it as parent if we do not already have one */
if (kobj->kset) {
if (!parent)
/*kobj属于某个kset,但是该kobj没有父对象,则以kset的kobj作为父对象*/
parent = kobject_get(&kobj->kset->kobj);
kobj_kset_join(kobj); /*将kojbect添加到kset结构中的链表当中*/
kobj->parent = parent;
}
pr_debug("kobject: '%s' (%p): %s: parent: '%s', set: '%s'\n",
kobject_name(kobj), kobj, __func__,
parent ? kobject_name(parent) : "<NULL>",
kobj->kset ? kobject_name(&kobj->kset->kobj) : "<NULL>");
error = create_dir(kobj); /*根据kobj->name在sys中建立目录*/
if (error) {
kobj_kset_leave(kobj); /*删除链表项*/
kobject_put(parent); /*减少引用计数*/
kobj->parent = NULL;
/* be noisy on error issues */
if (error == -EEXIST)
printk(KERN_ERR "%s failed for %s with "
"-EEXIST, don't try to register things with "
"the same name in the same directory.\n",
__func__, kobject_name(kobj));
else
printk(KERN_ERR "%s failed for %s (%d)\n",
__func__, kobject_name(kobj), error);
dump_stack();
} else
kobj->state_in_sysfs = 1;
return error;
}
在上面的kset_create中有kset->kobj.kset = NULL,因此if (kobj->kset)条件不满足。因此在这个函数中,对name进行了必要的检查之后,调用了create_dir在sysfs中创建目录。
在create_dir执行完成以后会在sysfs的根目录(/sys/)建立文件夹bus。该函数的详细分析将在后面给出。
至此,对bus目录的建立有了简单而直观的了解。我们可以看出kset其实就是表示一个文件夹,而kset本身也含有一个kobject,而该kobject的name字段即为该目录的名字,本例中为bus。
4. driver model
第2节所介绍的是最底层,最核心的内容。下面开始将描述较为高层的内容。
Linux设备模型使用了三个数据结构分别来描述总线、设备和驱动。所有的设备和对应的驱动都必须挂载在某一个总线上,通过总线,可以绑定设备和驱动。
这个属于分离的思想,将设备和驱动分开管理。
同时驱动程序可以了解到所有它所支持的设备,同样的,设备也能知道它对应驱动程序。
4.1 bus
总线是处理器与一个设备或者多个设备之间的通道。在设备模型中,所有的设备都挂载在某一个总线上。总线使用struct bus_type来表述。
下列代码位于include/linux/device.h。
struct bus_type {
const char *name;
struct bus_attribute *bus_attrs;
struct device_attribute *dev_attrs;
struct driver_attribute *drv_attrs;
int (*match)(struct device *dev, struct device_driver *drv);
int (*uevent)(struct device *dev, struct kobj_uevent_env *env);
int (*probe)(struct device *dev);
int (*remove)(struct device *dev);
void (*shutdown)(struct device *dev);
int (*suspend)(struct device *dev, pm_message_t state);
int (*suspend_late)(struct device *dev, pm_message_t state);
int (*resume_early)(struct device *dev);
int (*resume)(struct device *dev);
struct dev_pm_ops *pm;
struct bus_type_private *p;
};
/**
* struct bus_type_private - structure to hold the private to the driver core portions of the bus_type structure.
*
* @subsys - the struct kset that defines this bus. This is the main kobject
* @drivers_kset - the list of drivers associated with this bus
* @devices_kset - the list of devices associated with this bus
* @klist_devices - the klist to iterate over the @devices_kset
* @klist_drivers - the klist to iterate over the @drivers_kset
* @bus_notifier - the bus notifier list for anything that cares about things
* on this bus.
* @bus - pointer back to the struct bus_type that this structure is associated
* with.
*
* This structure is the one that is the actual kobject allowing struct
* bus_type to be statically allocated safely. Nothing outside of the driver
* core should ever touch these fields.
*/
struct bus_type_private {
struct kset subsys;
struct kset *drivers_kset;
struct kset *devices_kset;
struct klist klist_devices;
struct klist klist_drivers;
struct blocking_notifier_head bus_notifier;
unsigned int drivers_autoprobe:1;
struct bus_type *bus;
};
我们看到每个bus_type都包含一个kset对象subsys,该kset在/sys/bus/目录下有着对应的一个目录,目录名即为字段name。后面我们将看到platform总线的建立。
drivers_kset和devices_kset对应着两个目录,该两个目录下将包含该总线上的设备和相应的驱动程序。
同时总线上的设备和驱动将分别保存在两个链表中:klist_devices和klist_drivers。
4.2 device
设备对象在driver-model中使用struct device来表示。
下列代码位于include/linux/device.h。
struct device {
struct device *parent;
struct device_private *p;
struct kobject kobj;
const char *init_name; /* initial name of the device */
struct device_type *type;
struct semaphore sem; /* semaphore to synchronize calls to
* its driver.
*/
struct bus_type *bus; /* type of bus device is on */
struct device_driver *driver; /* which driver has allocated this
device */
void *driver_data; /* data private to the driver */
void *platform_data; /* Platform specific data, device
core doesn't touch it */
struct dev_pm_info power;
#ifdef CONFIG_NUMA
int numa_node; /* NUMA node this device is close to */
#endif
u64 *dma_mask; /* dma mask (if dma'able device) */
u64 coherent_dma_mask;/* Like dma_mask, but for
alloc_coherent mappings as
not all hardware supports
64 bit addresses for consistent
allocations such descriptors. */
struct device_dma_parameters *dma_parms;
struct list_head dma_pools; /* dma pools (if dma'ble) */
struct dma_coherent_mem *dma_mem; /* internal for coherent mem
override */
/* arch specific additions */
struct dev_archdata archdata;
dev_t devt; /* dev_t, creates the sysfs "dev" */
spinlock_t devres_lock;
struct list_head devres_head;
struct klist_node knode_class;
struct class *class;
struct attribute_group **groups; /* optional groups */
void (*release)(struct device *dev);
};
/**
* struct device_private - structure to hold the private to the driver core portions of the device structure.
*
* @klist_children - klist containing all children of this device
* @knode_parent - node in sibling list
* @knode_driver - node in driver list
* @knode_bus - node in bus list
* @device - pointer back to the struct class that this structure is
* associated with.
*
* Nothing outside of the driver core should ever touch these fields.
*/
struct device_private {
struct klist klist_children;
struct klist_node knode_parent;
struct klist_node knode_driver;
struct klist_node knode_bus;
struct device *device;
};
device本身包含一个kobject,也就是说这个device在sysfs的某个地方有着一个对应的目录。
该device所挂载的bus由knode_bus指定。
该device所对应的设备驱动由knode_driver指定。
4.3 driver
设备设备对象在driver-model中使用struct device_driver来表示。
下列代码位于include/linux/device.h。
struct device_driver {
const char *name;
struct bus_type *bus;
struct module *owner;
const char *mod_name; /* used for built-in modules */
int (*probe) (struct device *dev);
int (*remove) (struct device *dev);
void (*shutdown) (struct device *dev);
int (*suspend) (struct device *dev, pm_message_t state);
int (*resume) (struct device *dev);
struct attribute_group **groups;
struct dev_pm_ops *pm;
struct driver_private *p;
};
struct driver_private {
struct kobject kobj;
struct klist klist_devices;
struct klist_node knode_bus;
struct module_kobject *mkobj;
struct device_driver *driver;
};
device_driver本身包含一个kobject,也就是说这个device_driver在sysfs的某个地方有着一个对应的目录。
该设备驱动所支持的设备由klist_devices指定。
该设备驱动所挂载的总线由knode_bus制定。
5. Bus举例
本节我们将以platform总线为例,来看看,/sys/bus/platform是如何建立的。
platform总线的注册是由platform_bus_init函数完成的。该函数在内核启动阶段被调用,我们来简单看下调用过程:
start_kernel() -> rest_init() ->kernel_init() -> do_basic_setup() -> driver_init() -> platform_bus_init()。
注:kernel_init()是在rest_init函数中创建内核线程来执行的。
int __init platform_bus_init(void)
{
int error;
early_platform_cleanup();
error = device_register(&platform_bus);
if (error)
return error;
error = bus_register(&platform_bus_type);
if (error)
device_unregister(&platform_bus);
return error;
}
struct bus_type platform_bus_type = {
.name = "platform",
.dev_attrs = platform_dev_attrs,
.match = platform_match,
.uevent = platform_uevent,
.pm = PLATFORM_PM_OPS_PTR,
};
EXPORT_SYMBOL_GPL(platform_bus_type);
从bus_type,我们看到该总线的名字为platform。
调用了两个函数,我们只关注bus_register函数。
/**
* bus_register - register a bus with the system.
* @bus: bus.
*
* Once we have that, we registered the bus with the kobject
* infrastructure, then register the children subsystems it has:
* the devices and drivers that belong to the bus.
*/
int bus_register(struct bus_type *bus)
{
int retval;
struct bus_type_private *priv;
priv = kzalloc(sizeof(struct bus_type_private), GFP_KERNEL);
if (!priv)
return -ENOMEM;
/*互相保存*/
priv->bus = bus;
bus->p = priv;
BLOCKING_INIT_NOTIFIER_HEAD(&priv->bus_notifier);
/*设定kobject->name*/
retval = kobject_set_name(&priv->subsys.kobj, "%s", bus->name);
if (retval)
goto out;
priv->subsys.kobj.kset = bus_kset;
priv->subsys.kobj.ktype = &bus_ktype;
priv->drivers_autoprobe = 1;
/*注册kset,在bus/建立目录XXX,XXX为bus->name*/
retval = kset_register(&priv->subsys);
if (retval)
goto out;
/*创建属性,在bus/XXX/建立文件uevent*/
retval = bus_create_file(bus, &bus_attr_uevent);
if (retval)
goto bus_uevent_fail;
/*创建kset,在bus/XXX/建立目录devices*/
priv->devices_kset = kset_create_and_add("devices", NULL,
&priv->subsys.kobj);
if (!priv->devices_kset) {
retval = -ENOMEM;
goto bus_devices_fail;
}
/*创建kset,在bus/XXX/建立目录drivers*/
priv->drivers_kset = kset_create_and_add("drivers", NULL,
&priv->subsys.kobj);
if (!priv->drivers_kset) {
retval = -ENOMEM;
goto bus_drivers_fail;
}
/*初始化2个内核链表,*/
klist_init(&priv->klist_devices, klist_devices_get, klist_devices_put);
klist_init(&priv->klist_drivers, NULL, NULL);
/*创建属性,在bus/XXX/建立文件drivers_autoprobe和drivers_probe*/
retval = add_probe_files(bus);
if (retval)
goto bus_probe_files_fail;
/*根据bus->bus_attribute创建属性,在bus/XXX/下建立相应的文件d*/
retval = bus_add_attrs(bus);
if (retval)
goto bus_attrs_fail;
pr_debug("bus: '%s': registered\n", bus->name);
return 0;
bus_attrs_fail:
remove_probe_files(bus);
bus_probe_files_fail:
kset_unregister(bus->p->drivers_kset);
bus_drivers_fail:
kset_unregister(bus->p->devices_kset);
bus_devices_fail:
bus_remove_file(bus, &bus_attr_uevent);
bus_uevent_fail:
kset_unregister(&bus->p->subsys);
kfree(bus->p);
out:
bus->p = NULL;
return retval;
}
EXPORT_SYMBOL_GPL(bus_register);
函数中,首先调用kobject_set_name设置了bus对象的subsys.kobject->name 为 platform,也就是说会建立一个名为platform的目录。kobject_set_name函数在3.1小节中已经给出。
在这里还用到了bus_kset这个变量,这个变量就是在第3节buses_init函数中建立bus目录所对应的kset对象。
接着,priv->subsys.kobj.kset = bus_kset,设置subsys的kobj在bus_kset对象包含的集合中,也就是说bus目录下将包含subsys对象所对应的目录,即platform。
紧接着调用了kset_register,参数为&priv->subsys。该函数在3.2节中以给出。在该函数的调用过程中,将调用kobj_kset_join函数,该函数将kobject添加到kobject->kset的链表中。
/* add the kobject to its kset's list */
static void kobj_kset_join(struct kobject *kobj)
{
if (!kobj->kset)
return;
kset_get(kobj->kset); /*增加kset引用计数*/
spin_lock(&kobj->kset->list_lock);
list_add_tail(&kobj->entry, &kobj->kset->list); /*将kojbect添加到kset结构中的链表当中*/
spin_unlock(&kobj->kset->list_lock);
}
kset_register函数执行完成后,将在/sys/bus/下建立目录platform。此刻,我们先来看下kset和kobject之间的关系。
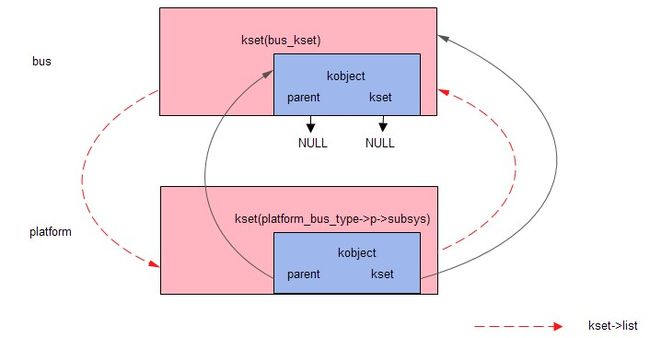
然后,调用了bus_create_file函数在/sys/bus/platform/下建立文件uevent。
int bus_create_file(struct bus_type *bus, struct bus_attribute *attr)
{
int error;
if (bus_get(bus)) {
error = sysfs_create_file(&bus->p->subsys.kobj, &attr->attr);
bus_put(bus);
} else
error = -EINVAL;
return error;
}
EXPORT_SYMBOL_GPL(bus_create_file);
有关底层的sysfs将在后面叙述,这里只要关注参数&bus->p->subsys.kobj,表示在该kset下建立文件,也就是platform下建立。
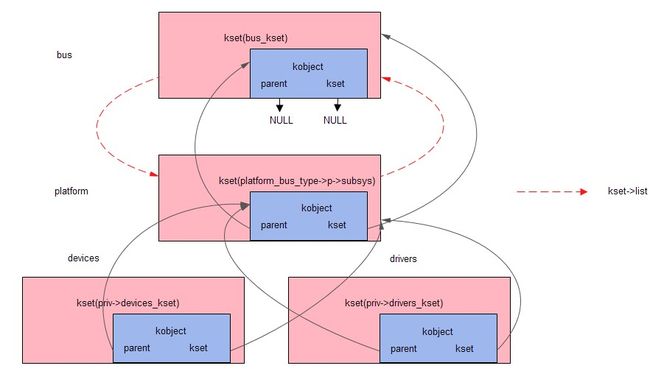
接着调用了2次kset_create_and_add,分别在/sys/bus/platform/下建立了文件夹devices和drivers。该函数位于第3节开始处。
这里和第3节调用kset_create_and_add时的最主要一个区别就是:此时的parent参数不为NULL,而是&priv->subsys.kobj。
也就是说,将要创建的kset的kobject->parent = &priv->subsys.kobj,也即新建的kset被包含在platform文件夹对应的kset中。
我们来看下关系图:
随后,调用了add_probe_files创建了属性文件drivers_autoprobe和drivers_probe。
static int add_probe_files(struct bus_type *bus)
{
int retval;
retval = bus_create_file(bus, &bus_attr_drivers_probe);
if (retval)
goto out;
retval = bus_create_file(bus, &bus_attr_drivers_autoprobe);
if (retval)
bus_remove_file(bus, &bus_attr_drivers_probe);
out:
return retval;
}
该函数只是简单的调用了两次bus_create_file,该函数已在前面叙述过。
最后调用bus_add_attrs创建总线相关的属性文件。
/**
* bus_add_attrs - Add default attributes for this bus.
* @bus: Bus that has just been registered.
*/
static int bus_add_attrs(struct bus_type *bus)
{
int error = 0;
int i;
if (bus->bus_attrs) {
for (i = 0; attr_name(bus->bus_attrs[i]); i++) {
error = bus_create_file(bus, &bus->bus_attrs[i]);
if (error)
goto err;
}
}
done:
return error;
err:
while (--i >= 0)
bus_remove_file(bus, &bus->bus_attrs[i]);
goto done;
}
我们可以看到这个函数将根据bus_type->bus_arrts来创建属性文件。不过,在本例中,bus_arrts从未给出定义,因此次函数不做任何工作。
好了,整个bus_register调用完成了,我们来看下sysfs中实际的情况。
[root@yj423 platform]#pwd
/sys/bus/platform
[root@yj423 platform]#ls
devices drivers drivers_autoprobe drivers_probe uevent
最后,我们对整个bus_register的过程进行一个小结。
6. device举例
本节将首先讲述如何在/sys/devices下建立虚拟的platform设备,然后再讲述如何在/sys/devices/platform/下建立子设备。
6.1 虚拟的platform设备
之所以叫虚拟是因为这个platform并不代表任何实际存在的设备,但是platform将是所有具体设备的父设备。
在第5节,platform_bus_init函数中还调用了device_register,现在对其做出分析。
int __init platform_bus_init(void)
{
int error;
early_platform_cleanup();
error = device_register(&platform_bus);
if (error)
return error;
error = bus_register(&platform_bus_type);
if (error)
device_unregister(&platform_bus);
return error;
}
struct device platform_bus = {
.init_name = "platform",
};
EXPORT_SYMBOL_GPL(platform_bus)
下列函数位于drivers/base/core.c。
/**
* device_register - register a device with the system.
* @dev: pointer to the device structure
*
* This happens in two clean steps - initialize the device
* and add it to the system. The two steps can be called
* separately, but this is the easiest and most common.
* I.e. you should only call the two helpers separately if
* have a clearly defined need to use and refcount the device
* before it is added to the hierarchy.
*
* NOTE: _Never_ directly free @dev after calling this function, even
* if it returned an error! Always use put_device() to give up the
* reference initialized in this function instead.
*/
int device_register(struct device *dev)
{
device_initialize(dev); /*初始化dev的某些字段*/
return device_add(dev); /*将设备添加到系统中*/
}
一个设备的注册分成两部,每步通过调用一个函数函数。首先先看第一步:
下列函数位于drivers/base/core.c。
/**
* device_initialize - init device structure.
* @dev: device.
*
* This prepares the device for use by other layers by initializing
* its fields.
* It is the first half of device_register(), if called by
* that function, though it can also be called separately, so one
* may use @dev's fields. In particular, get_device()/put_device()
* may be used for reference counting of @dev after calling this
* function.
*
* NOTE: Use put_device() to give up your reference instead of freeing
* @dev directly once you have called this function.
*/
void device_initialize(struct device *dev)
{
dev->kobj.kset = devices_kset; /*设置kobj属于哪个kset,/sys/devices/*/
kobject_init(&dev->kobj, &device_ktype);/*初始化dev->kobj*/
INIT_LIST_HEAD(&dev->dma_pools); /*初始化链表头*/
init_MUTEX(&dev->sem); /*初始化互斥体*/
spin_lock_init(&dev->devres_lock); /*初始化自旋锁*/
INIT_LIST_HEAD(&dev->devres_head); /*初始化链表头*/
device_init_wakeup(dev, 0); /*设置该device不能唤醒*/
device_pm_init(dev); /*设置该device可操作*/
set_dev_node(dev, -1); /*设置NUMA节点*/
}
6.1.1 有关devices_kset
首先其中用到了devices_kset对象,这个对象和第3节当中的bus_kset是同样的性质,也就是说该对象表示一个目录。
该对象的建立是在devices_init函数中完成的。
int __init devices_init(void)
{
devices_kset = kset_create_and_add("devices", &device_uevent_ops, NULL);
if (!devices_kset)
return -ENOMEM;
dev_kobj = kobject_create_and_add("dev", NULL);
if (!dev_kobj)
goto dev_kobj_err;
sysfs_dev_block_kobj = kobject_create_and_add("block", dev_kobj);
if (!sysfs_dev_block_kobj)
goto block_kobj_err;
sysfs_dev_char_kobj = kobject_create_and_add("char", dev_kobj);
if (!sysfs_dev_char_kobj)
goto char_kobj_err;
return 0;
char_kobj_err:
kobject_put(sysfs_dev_block_kobj);
block_kobj_err:
kobject_put(dev_kobj);
dev_kobj_err:
kset_unregister(devices_kset);
return -ENOMEM;
}
由此可见,devices_kset对象表示的目录为/sys下的devices目录。
6.1.2 kobject_init
下列函数位于lib/kojbect.c。
/**
* kobject_init - initialize a kobject structure
* @kobj: pointer to the kobject to initialize
* @ktype: pointer to the ktype for this kobject.
*
* This function will properly initialize a kobject such that it can then
* be passed to the kobject_add() call.
*
* After this function is called, the kobject MUST be cleaned up by a call
* to kobject_put(), not by a call to kfree directly to ensure that all of
* the memory is cleaned up properly.
*/
void kobject_init(struct kobject *kobj, struct kobj_type *ktype)
{
char *err_str;
if (!kobj) {
err_str = "invalid kobject pointer!";
goto error;
}
if (!ktype) {
err_str = "must have a ktype to be initialized properly!\n";
goto error;
}
if (kobj->state_initialized) {
/* do not error out as sometimes we can recover */
printk(KERN_ERR "kobject (%p): tried to init an initialized "
"object, something is seriously wrong.\n", kobj);
dump_stack();
}
kobject_init_internal(kobj);
kobj->ktype = ktype;
return;
error:
printk(KERN_ERR "kobject (%p): %s\n", kobj, err_str);
dump_stack();
}
EXPORT_SYMBOL(kobject_init);
static void kobject_init_internal(struct kobject *kobj)
{
if (!kobj)
return;
kref_init(&kobj->kref); /*初始化引用基计数*/
INIT_LIST_HEAD(&kobj->entry); /*初始化链表头*/
kobj->state_in_sysfs = 0;
kobj->state_add_uevent_sent = 0;
kobj->state_remove_uevent_sent = 0;
kobj->state_initialized = 1;
}
该函数在做了一系列的必要检查后,调用kobject_init_internal初始化了kobject的某些字段。
6.1.3 device_init_wakeup
参数val为0,设置该device不能够唤醒。
#ifdef CONFIG_PM
/* changes to device_may_wakeup take effect on the next pm state change.
* by default, devices should wakeup if they can.
*/
static inline void device_init_wakeup(struct device *dev, int val)
{
dev->power.can_wakeup = dev->power.should_wakeup = !!val;
}
。。。。。。
#else /* !CONFIG_PM */
/* For some reason the next two routines work even without CONFIG_PM */
static inline void device_init_wakeup(struct device *dev, int val)
{
dev->power.can_wakeup = !!val;
}
。。。。。。
#endif
6.1.4 device_pm_init
设置电源的状态。
static inline void device_pm_init(struct device *dev)
{
dev->power.status = DPM_ON; /*该device被认为可操作*/
}
6.1.5 set_dev_node
如果使用NUMA,则设置NUMA节点。
#ifdef CONFIG_NUMA
。。。。。。
static inline void set_dev_node(struct device *dev, int node)
{
dev->numa_node = node;
}
#else
。。。。。。
static inline void set_dev_node(struct device *dev, int node)
{
}
#endif
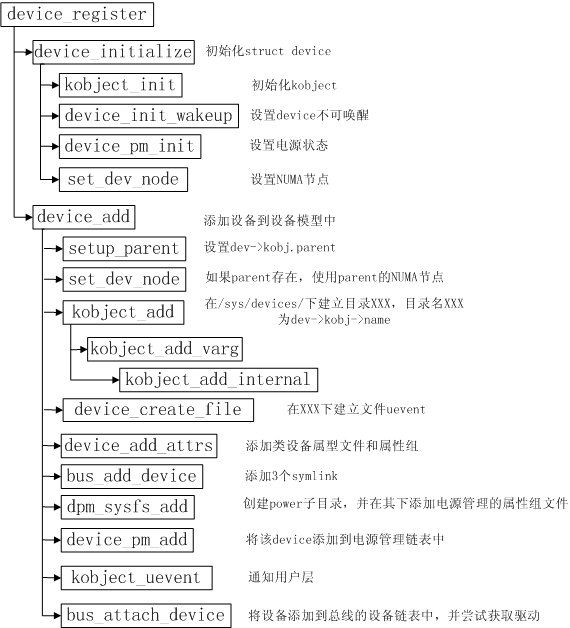
6.2 device_add
接下来是注册的第二步:调用device_add。
/**
* device_add - add device to device hierarchy.
* @dev: device.
*
* This is part 2 of device_register(), though may be called
* separately _iff_ device_initialize() has been called separately.
*
* This adds @dev to the kobject hierarchy via kobject_add(), adds it
* to the global and sibling lists for the device, then
* adds it to the other relevant subsystems of the driver model.
*
* NOTE: _Never_ directly free @dev after calling this function, even
* if it returned an error! Always use put_device() to give up your
* reference instead.
*/
int device_add(struct device *dev)
{
struct device *parent = NULL;
struct class_interface *class_intf;
int error = -EINVAL;
dev = get_device(dev); /*增加引用计数*/
if (!dev)
goto done;
dev->p = kzalloc(sizeof(*dev->p), GFP_KERNEL); /*分配device_private结构*/
if (!dev->p) {
error = -ENOMEM;
goto done;
}
dev->p->device = dev; /*保存dev*/
klist_init(&dev->p->klist_children, klist_children_get, /*初始化内核链表*/
klist_children_put);
/*
* for statically allocated devices, which should all be converted
* some day, we need to initialize the name. We prevent reading back
* the name, and force the use of dev_name()
*/
if (dev->init_name) {
dev_set_name(dev, dev->init_name); /*dev->kobject->name = dev->init_name*/
dev->init_name = NULL;
}
if (!dev_name(dev)) /*检查dev->kobject->name*/
goto name_error;
pr_debug("device: '%s': %s\n", dev_name(dev), __func__);
parent = get_device(dev->parent); /*增加父设备引用计数*/
setup_parent(dev, parent); /*设置dev->kobject->parent*/
/* use parent numa_node */
if (parent)
set_dev_node(dev, dev_to_node(parent));
/* first, register with generic layer. */
/* we require the name to be set before, and pass NULL */
/* 执行完以后,将在/sys/devices/下建立目录XXX,目录名XXX为dev->kobj->name*/
error = kobject_add(&dev->kobj, dev->kobj.parent, NULL);
if (error)
goto Error;
/* notify platform of device entry */
if (platform_notify)
platform_notify(dev);
/*在XXX下建立文件uevent*/
error = device_create_file(dev, &uevent_attr);
if (error)
goto attrError;
if (MAJOR(dev->devt)) {/*主设备号不为0*/
error = device_create_file(dev, &devt_attr);/*创建属性文件dev*/
if (error)
goto ueventattrError;
/* 在sys/dev/char/下建立symlink,名字为主设备号:次设备号,该链接指向XXX */
error = device_create_sys_dev_entry(dev);
if (error)
goto devtattrError;
}
error = device_add_class_symlinks(dev);
if (error)
goto SymlinkError;
error = device_add_attrs(dev); /*添加类设备属型文件和属性组*/
if (error)
goto AttrsError;
error = bus_add_device(dev); /*添加3个symlink*/
if (error)
goto BusError;
error = dpm_sysfs_add(dev); /*创建power子目录,并在其下添加电源管理的属性组文件*/
if (error)
goto DPMError;
device_pm_add(dev); /*将该device添加到电源管理链表中*/
/* Notify clients of device addition. This call must come
* after dpm_sysf_add() and before kobject_uevent().
*/
if (dev->bus)
blocking_notifier_call_chain(&dev->bus->p->bus_notifier,
BUS_NOTIFY_ADD_DEVICE, dev);
kobject_uevent(&dev->kobj, KOBJ_ADD); /*通知用户层*/
bus_attach_device(dev); /*将设备添加到总线的设备链表中,并尝试获取驱动*/
if (parent)
klist_add_tail(&dev->p->knode_parent, /*有父设备,则将该设备添加到父设备的儿子链表中*/
&parent->p->klist_children);
if (dev->class) { /*该设备属于某个设备类*/
mutex_lock(&dev->class->p->class_mutex);
/* tie the class to the device */
klist_add_tail(&dev->knode_class, /*将device添加到class的类设备链表中*/
&dev->class->p->class_devices);
/* notify any interfaces that the device is here */
list_for_each_entry(class_intf,
&dev->class->p->class_interfaces, node)
if (class_intf->add_dev)
class_intf->add_dev(dev, class_intf);
mutex_unlock(&dev->class->p->class_mutex);
}
done:
put_device(dev);
return error;
DPMError:
bus_remove_device(dev);
BusError:
device_remove_attrs(dev);
AttrsError:
device_remove_class_symlinks(dev);
SymlinkError:
if (MAJOR(dev->devt))
device_remove_sys_dev_entry(dev);
devtattrError:
if (MAJOR(dev->devt))
device_remove_file(dev, &devt_attr);
ueventattrError:
device_remove_file(dev, &uevent_attr);
attrError:
kobject_uevent(&dev->kobj, KOBJ_REMOVE);
kobject_del(&dev->kobj);
Error:
cleanup_device_parent(dev);
if (parent)
put_device(parent);
name_error:
kfree(dev->p);
dev->p = NULL;
goto done;
}
该函数调用了非常多的其他函数,接下来对主要的函数做出分析。
6.2.1 setup_parent函数
下列代码位于drivers/base/core.c。
static void setup_parent(struct device *dev, struct device *parent)
{
struct kobject *kobj;
kobj = get_device_parent(dev, parent);
if (kobj)
dev->kobj.parent = kobj;
}
static struct kobject *get_device_parent(struct device *dev,
struct device *parent)
{
/* class devices without a parent live in /sys/class/<classname>/ */
if (dev->class && (!parent || parent->class != dev->class))
return &dev->class->p->class_subsys.kobj;
/* all other devices keep their parent */
else if (parent)
return &parent->kobj;
return NULL;
}
该函数将设置dev对象的parent。在这里实际传入的parent为NULL,同时dev->class也没有定义过。因此这个函数什么都没有做。
6.2.2 kobject_add函数
下列代码位于lib/kobject.c。
/**
* kobject_add - the main kobject add function
* @kobj: the kobject to add
* @parent: pointer to the parent of the kobject.
* @fmt: format to name the kobject with.
*
* The kobject name is set and added to the kobject hierarchy in this
* function.
*
* If @parent is set, then the parent of the @kobj will be set to it.
* If @parent is NULL, then the parent of the @kobj will be set to the
* kobject associted with the kset assigned to this kobject. If no kset
* is assigned to the kobject, then the kobject will be located in the
* root of the sysfs tree.
*
* If this function returns an error, kobject_put() must be called to
* properly clean up the memory associated with the object.
* Under no instance should the kobject that is passed to this function
* be directly freed with a call to kfree(), that can leak memory.
*
* Note, no "add" uevent will be created with this call, the caller should set
* up all of the necessary sysfs files for the object and then call
* kobject_uevent() with the UEVENT_ADD parameter to ensure that
* userspace is properly notified of this kobject's creation.
*/
int kobject_add(struct kobject *kobj, struct kobject *parent,
const char *fmt, ...)
{
va_list args;
int retval;
if (!kobj)
return -EINVAL;
if (!kobj->state_initialized) {
printk(KERN_ERR "kobject '%s' (%p): tried to add an "
"uninitialized object, something is seriously wrong.\n",
kobject_name(kobj), kobj);
dump_stack();
return -EINVAL;
}
va_start(args, fmt);
retval = kobject_add_varg(kobj, parent, fmt, args);
va_end(args);
return retval;
}
EXPORT_SYMBOL(kobject_add);
static int kobject_add_varg(struct kobject *kobj, struct kobject *parent,
const char *fmt, va_list vargs)
{
int retval;
retval = kobject_set_name_vargs(kobj, fmt, vargs);
if (retval) {
printk(KERN_ERR "kobject: can not set name properly!\n");
return retval;
}
kobj->parent = parent;
return kobject_add_internal(kobj);
}
static int kobject_add_internal(struct kobject *kobj)
{
int error = 0;
struct kobject *parent;
if (!kobj)
return -ENOENT;
/*检查name字段是否存在*/
if (!kobj->name || !kobj->name[0]) {
WARN(1, "kobject: (%p): attempted to be registered with empty "
"name!\n", kobj);
return -EINVAL;
}
parent = kobject_get(kobj->parent); /*有父对象则增加父对象引用计数*/
/* join kset if set, use it as parent if we do not already have one */
if (kobj->kset) {
if (!parent)
/*kobj属于某个kset,但是该kobj没有父对象,则以kset的kobj作为父对象*/
parent = kobject_get(&kobj->kset->kobj);
kobj_kset_join(kobj); /*将kojbect添加到kset结构中的链表当中*/
kobj->parent = parent;
}
pr_debug("kobject: '%s' (%p): %s: parent: '%s', set: '%s'\n",
kobject_name(kobj), kobj, __func__,
parent ? kobject_name(parent) : "<NULL>",
kobj->kset ? kobject_name(&kobj->kset->kobj) : "<NULL>");
error = create_dir(kobj); /*根据kobj->name在sys中建立目录*/
if (error) {
kobj_kset_leave(kobj); /*删除链表项*/
kobject_put(parent); /*减少引用计数*/
kobj->parent = NULL;
/* be noisy on error issues */
if (error == -EEXIST)
printk(KERN_ERR "%s failed for %s with "
"-EEXIST, don't try to register things with "
"the same name in the same directory.\n",
__func__, kobject_name(kobj));
else
printk(KERN_ERR "%s failed for %s (%d)\n",
__func__, kobject_name(kobj), error);
dump_stack();
} else
kobj->state_in_sysfs = 1;
return error;
}
在调用时,参数parent为NULL,且dev->kobj.kset在6.1节device_initialize函数中设置为devices_kset。
而devices_kset对应着/sys/devices目录,因此该函数调用完成后将在/sys/devices目录下生成目录platform。
但是这里比较奇怪的是,为什么platform目录没有对应的kset对象???
6.2.3 device_create_sys_dev_entry函数
在调用该函数之前,会在/sys/devices/platform/下生成属性文件。接着如果该device的设备号不为0,则创建属性文件dev,并调用本函数。
但是,在本例中设备号devt从未设置过,显然为0,那么本函数实际并未执行。
下列代码位于drivers/base/core.c。
static int device_create_sys_dev_entry(struct device *dev)
{
struct kobject *kobj = device_to_dev_kobj(dev);
int error = 0;
char devt_str[15];
if (kobj) {
format_dev_t(devt_str, dev->devt);
error = sysfs_create_link(kobj, &dev->kobj, devt_str);
}
return error;
}
/**
* device_to_dev_kobj - select a /sys/dev/ directory for the device
* @dev: device
*
* By default we select char/ for new entries. Setting class->dev_obj
* to NULL prevents an entry from being created. class->dev_kobj must
* be set (or cleared) before any devices are registered to the class
* otherwise device_create_sys_dev_entry() and
* device_remove_sys_dev_entry() will disagree about the the presence
* of the link.
*/
static struct kobject *device_to_dev_kobj(struct device *dev)
{
struct kobject *kobj;
if (dev->class)
kobj = dev->class->dev_kobj;
else
kobj = sysfs_dev_char_kobj;
return kobj;
}
6.2.4 device_add_class_symlinks函数
由于dev->class为NULL,本函数其实没做任何工作。
下列代码位于drivers/base/core.c。
static int device_add_class_symlinks(struct device *dev)
{
int error;
if (!dev->class)
return 0;
error = sysfs_create_link(&dev->kobj,
&dev->class->p->class_subsys.kobj,
"subsystem");
if (error)
goto out;
#ifdef CONFIG_SYSFS_DEPRECATED
/* stacked class devices need a symlink in the class directory */
if (dev->kobj.parent != &dev->class->p->class_subsys.kobj &&
device_is_not_partition(dev)) {
error = sysfs_create_link(&dev->class->p->class_subsys.kobj,
&dev->kobj, dev_name(dev));
if (error)
goto out_subsys;
}
if (dev->parent && device_is_not_partition(dev)) {
struct device *parent = dev->parent;
char *class_name;
/*
* stacked class devices have the 'device' link
* pointing to the bus device instead of the parent
*/
while (parent->class && !parent->bus && parent->parent)
parent = parent->parent;
error = sysfs_create_link(&dev->kobj,
&parent->kobj,
"device");
if (error)
goto out_busid;
class_name = make_class_name(dev->class->name,
&dev->kobj);
if (class_name)
error = sysfs_create_link(&dev->parent->kobj,
&dev->kobj, class_name);
kfree(class_name);
if (error)
goto out_device;
}
return 0;
out_device:
if (dev->parent && device_is_not_partition(dev))
sysfs_remove_link(&dev->kobj, "device");
out_busid:
if (dev->kobj.parent != &dev->class->p->class_subsys.kobj &&
device_is_not_partition(dev))
sysfs_remove_link(&dev->class->p->class_subsys.kobj,
dev_name(dev));
#else
/* link in the class directory pointing to the device */
error = sysfs_create_link(&dev->class->p->class_subsys.kobj,
&dev->kobj, dev_name(dev));
if (error)
goto out_subsys;
if (dev->parent && device_is_not_partition(dev)) {
error = sysfs_create_link(&dev->kobj, &dev->parent->kobj,
"device");
if (error)
goto out_busid;
}
return 0;
out_busid:
sysfs_remove_link(&dev->class->p->class_subsys.kobj, dev_name(dev));
#endif
out_subsys:
sysfs_remove_link(&dev->kobj, "subsystem");
out:
return error;
}
6.2.5 device_add_attrs函数
同样dev->class为空,什么都没干。
下列代码位于drivers/base/core.c。
static int device_add_attrs(struct device *dev)
{
struct class *class = dev->class;
struct device_type *type = dev->type;
int error;
if (class) {
error = device_add_attributes(dev, class->dev_attrs);
if (error)
return error;
}
if (type) {
error = device_add_groups(dev, type->groups);
if (error)
goto err_remove_class_attrs;
}
error = device_add_groups(dev, dev->groups);
if (error)
goto err_remove_type_groups;
return 0;
err_remove_type_groups:
if (type)
device_remove_groups(dev, type->groups);
err_remove_class_attrs:
if (class)
device_remove_attributes(dev, class->dev_attrs);
return error;
}
6.2.6 bus_add_device函数
由于dev->bus未指定,因此这个函数什么都没干。
该函数将创建三个symlink,在sysfs中建立总线和设备间的关系。
下列代码位于drivers/base/bus.c。
/**
* bus_add_device - add device to bus
* @dev: device being added
*
* - Add the device to its bus's list of devices.
* - Create link to device's bus.
*/
int bus_add_device(struct device *dev)
{
struct bus_type *bus = bus_get(dev->bus);
int error = 0;
if (bus) {
pr_debug("bus: '%s': add device %s\n", bus->name, dev_name(dev));
error = device_add_attrs(bus, dev);
if (error)
goto out_put;
/*在sys/bus/XXX/devices下建立symlink,名字为设备名,该链接指向/sys/devices/下的某个目录*/
error = sysfs_create_link(&bus->p->devices_kset->kobj,
&dev->kobj, dev_name(dev));
if (error)
goto out_id;
/*在sys/devices/的某个目录下建立symlink,名字为subsystem,该链接指向/sys/bus/下的某个目录*/
error = sysfs_create_link(&dev->kobj,
&dev->bus->p->subsys.kobj, "subsystem");
if (error)
goto out_subsys;
/*在sys/devices/的某个目录下建立symlink,名字为bus,该链接指向/sys/bus/下的某个目录*/
error = make_deprecated_bus_links(dev);
if (error)
goto out_deprecated;
}
return 0;
out_deprecated:
sysfs_remove_link(&dev->kobj, "subsystem");
out_subsys:
sysfs_remove_link(&bus->p->devices_kset->kobj, dev_name(dev));
out_id:
device_remove_attrs(bus, dev);
out_put:
bus_put(dev->bus);
return error;
}
6.2.7 dpm_sysfs_add函数
下列代码位于drivers/base/power/sysfs.c。
int dpm_sysfs_add(struct device * dev)
{
return sysfs_create_group(&dev->kobj, &pm_attr_group);
}
static DEVICE_ATTR(wakeup, 0644, wake_show, wake_store);
static struct attribute * power_attrs[] = {
&dev_attr_wakeup.attr,
NULL,
};
static struct attribute_group pm_attr_group = {
.name = "power",
.attrs = power_attrs,
};
该函数将在XXX目录下建立power子目录,并在该子目录下建立属性文件wakeup。
在本例中,将在/sys/bus/platform下建立子目录power并在子目录下建立wakeup文件。
6.2.8 device_pm_add函数
下列代码位于drivers/base/power/main.c。
/**
* device_pm_add - add a device to the list of active devices
* @dev: Device to be added to the list
*/
void device_pm_add(struct device *dev)
{
pr_debug("PM: Adding info for %s:%s\n",
dev->bus ? dev->bus->name : "No Bus",
kobject_name(&dev->kobj));
mutex_lock(&dpm_list_mtx);
if (dev->parent) {
if (dev->parent->power.status >= DPM_SUSPENDING)
dev_warn(dev, "parent %s should not be sleeping\n",
dev_name(dev->parent));
} else if (transition_started) {
/*
* We refuse to register parentless devices while a PM
* transition is in progress in order to avoid leaving them
* unhandled down the road
*/
dev_WARN(dev, "Parentless device registered during a PM transaction\n");
}
list_add_tail(&dev->power.entry, &dpm_list); /*将该设备添加到链表中*/
mutex_unlock(&dpm_list_mtx);
}
该函数只是将设备添加到电源管理链表中。
6.2.9 bus_attach_device函数
在本例中,由于bus未指定,该函数实际不做任何工作。
下列代码位于drivers/base/bus.c。
/**
* bus_attach_device - add device to bus
* @dev: device tried to attach to a driver
*
* - Add device to bus's list of devices.
* - Try to attach to driver.
*/
void bus_attach_device(struct device *dev)
{
struct bus_type *bus = dev->bus;
int ret = 0;
if (bus) {
if (bus->p->drivers_autoprobe)
ret = device_attach(dev); /*尝试获取驱动*/
WARN_ON(ret < 0);
if (ret >= 0) /*将设备挂在到总线中*/
klist_add_tail(&dev->p->knode_bus,
&bus->p->klist_devices);
}
}
/**
* device_attach - try to attach device to a driver.
* @dev: device.
*
* Walk the list of drivers that the bus has and call
* driver_probe_device() for each pair. If a compatible
* pair is found, break out and return.
*
* Returns 1 if the device was bound to a driver;
* 0 if no matching device was found;
* -ENODEV if the device is not registered.
*
* When called for a USB interface, @dev->parent->sem must be held.
*/
int device_attach(struct device *dev)
{
int ret = 0;
down(&dev->sem);
if (dev->driver) { /*如果已指定驱动,即已绑定*/
ret = device_bind_driver(dev); /*在sysfs中建立链接关系*/
if (ret == 0)
ret = 1;
else {
dev->driver = NULL;
ret = 0;
}
} else { /*尚未绑定,尝试绑定,遍历该总线上的所有驱动*/
ret = bus_for_each_drv(dev->bus, NULL, dev, __device_attach);
}
up(&dev->sem);
return ret;
}
EXPORT_SYMBOL_GPL(device_attach);
如果bus存在的话,将会调用device_attach函数进行绑定工作。该函数首先判断dev->driver,如果非0,表示该设备已经绑定了驱动,只要在sysfs中建立链接关系即可。
为0表示没有绑定,接着调用bus_for_each_drv,注意作为参数传入的__device_attach,这是个函数,后面会调用它。
我们来看下bus_for_each_drv:
/**
* bus_for_each_drv - driver iterator
* @bus: bus we're dealing with.
* @start: driver to start iterating on.
* @data: data to pass to the callback.
* @fn: function to call for each driver.
*
* This is nearly identical to the device iterator above.
* We iterate over each driver that belongs to @bus, and call
* @fn for each. If @fn returns anything but 0, we break out
* and return it. If @start is not NULL, we use it as the head
* of the list.
*
* NOTE: we don't return the driver that returns a non-zero
* value, nor do we leave the reference count incremented for that
* driver. If the caller needs to know that info, it must set it
* in the callback. It must also be sure to increment the refcount
* so it doesn't disappear before returning to the caller.
*/
int bus_for_each_drv(struct bus_type *bus, struct device_driver *start,
void *data, int (*fn)(struct device_driver *, void *))
{
struct klist_iter i;
struct device_driver *drv;
int error = 0;
if (!bus)
return -EINVAL;
klist_iter_init_node(&bus->p->klist_drivers, &i,
start ? &start->p->knode_bus : NULL);
while ((drv = next_driver(&i)) && !error)
error = fn(drv, data);
klist_iter_exit(&i);
return error;
}
EXPORT_SYMBOL_GPL(bus_for_each_drv);
该函数将遍历总线的drivers目录下的所有驱动,也就是/sys/bus/XXX/drivers/下的目录,为该driver调用fn函数,也就是__device_attach。我们来看下:
static int __device_attach(struct device_driver *drv, void *data)
{
struct device *dev = data;
if (!driver_match_device(drv, dev)) /*进行匹配工作*/
return 0;
return driver_probe_device(drv, dev);
}
static inline int driver_match_device(struct device_driver *drv,
struct device *dev)
{
return drv->bus->match ? drv->bus->match(dev, drv) : 1;
}
/**
* driver_probe_device - attempt to bind device & driver together
* @drv: driver to bind a device to
* @dev: device to try to bind to the driver
*
* This function returns -ENODEV if the device is not registered,
* 1 if the device is bound sucessfully and 0 otherwise.
*
* This function must be called with @dev->sem held. When called for a
* USB interface, @dev->parent->sem must be held as well.
*/
int driver_probe_device(struct device_driver *drv, struct device *dev)
{
int ret = 0;
if (!device_is_registered(dev)) /*该device是否已在sysfs中*/
return -ENODEV;
pr_debug("bus: '%s': %s: matched device %s with driver %s\n",
drv->bus->name, __func__, dev_name(dev), drv->name);
ret = really_probe(dev, drv);/*device已在sysfs,调用really_probe*/
return ret;
}
该函数首先调用driver_match_device函数,后者将会调用总线的match方法,如果有的话,来进行匹配工作。如果没有该方法,则返回1,表示匹配成功。
我们这里是针对platform总线,该总线的方法将在7.6.2节中看到。
随后,又调用了driver_probe_device函数。该函数将首先判断该device是否已在sysfs中,如果在则调用really_probe,否则返回出错。
really_probe将会调用驱动的probe并完成绑定的工作。该函数将在7.6.2节中分析。
6.2.10 小结
在本例中,当device_register调用完成以后,将在/sys/devices/下建立目录platform,并在platfrom下建立属性文件uevent和子目录power,最后在power子目录下建立wakeup属性文件。
最后以函数调用过程的总结来结束第6.2小结。
6.3 spi主控制器的平台设备
本节对一个特定的platform设备进行讲解,那就是spi主控制器的平台设备。
在内核的启动阶段,platform设备将被注册进内核。我们来看下。
下列代码位于arch/arm/mach-s3c2440/mach-smdk2440.c
static struct resource s3c_spi0_resource[] = {
[0] = {
.start = S3C24XX_PA_SPI,
.end = S3C24XX_PA_SPI + 0x1f,
.flags = IORESOURCE_MEM,
},
[1] = {
.start = IRQ_SPI0,
.end = IRQ_SPI0,
.flags = IORESOURCE_IRQ,
}
};
static u64 s3c_device_spi0_dmamask = 0xffffffffUL;
struct platform_device s3c_device_spi0 = {
.name = "s3c2410-spi",
.id = 0,
.num_resources = ARRAY_SIZE(s3c_spi0_resource),
.resource = s3c_spi0_resource,
.dev = {
.dma_mask = &s3c_device_spi0_dmamask,
.coherent_dma_mask = 0xffffffffUL
}
};
static struct platform_device *smdk2440_devices[] __initdata = {
&s3c_device_usb,
&s3c_device_lcd,
&s3c_device_wdt,
&s3c_device_i2c0,
&s3c_device_iis,
&s3c_device_spi0,
};
static void __init smdk2440_machine_init(void)
{
s3c24xx_fb_set_platdata(&smdk2440_fb_info);
s3c_i2c0_set_platdata(NULL);
platform_add_devices(smdk2440_devices, ARRAY_SIZE(smdk2440_devices));
smdk_machine_init();
}
在smdk2440_machine_init函数中,通过调用platform_add_devices将设备注册到内核中。接着来看下该函数。
6.3.1 platform_add_devices
/**
* platform_add_devices - add a numbers of platform devices
* @devs: array of platform devices to add
* @num: number of platform devices in array
*/
int platform_add_devices(struct platform_device **devs, int num)
{
int i, ret = 0;
for (i = 0; i < num; i++) {
ret = platform_device_register(devs[i]);
if (ret) {
while (--i >= 0)
platform_device_unregister(devs[i]);
break;
}
}
return ret;
}
EXPORT_SYMBOL_GPL(platform_add_devices);
该函数将根据devs指针数组,调用platform_device_register将platform设备逐一注册进内核。
6.3.2 platform_device_register
/**
* platform_device_register - add a platform-level device
* @pdev: platform device we're adding
*/
int platform_device_register(struct platform_device *pdev)
{
device_initialize(&pdev->dev);
return platform_device_add(pdev);
}
EXPORT_SYMBOL_GPL(platform_device_register);
调用了两个函数,第一个函数在6.1节已经分析过。我们来看下第二个函数。
6.3.2 platform_device_register
/**
* platform_device_add - add a platform device to device hierarchy
* @pdev: platform device we're adding
*
* This is part 2 of platform_device_register(), though may be called
* separately _iff_ pdev was allocated by platform_device_alloc().
*/
int platform_device_add(struct platform_device *pdev)
{
int i, ret = 0;
if (!pdev)
return -EINVAL;
if (!pdev->dev.parent)
pdev->dev.parent = &platform_bus; /*该设备的父设备是platform设备,/sys/devices/platform*/
pdev->dev.bus = &platform_bus_type; /*设备挂载到platform总线上*/
if (pdev->id != -1)
dev_set_name(&pdev->dev, "%s.%d", pdev->name, pdev->id);
else
dev_set_name(&pdev->dev, pdev->name);/*pdev->dev->kobj->name = pdev->name*/
/*遍历平台设备的资源,并将资源添加到资源树中*/
for (i = 0; i < pdev->num_resources; i++) {
struct resource *p, *r = &pdev->resource[i];
if (r->name == NULL)
r->name = dev_name(&pdev->dev); /*获取dev->kobject->name*/
p = r->parent;
if (!p) { /*p空*/
if (resource_type(r) == IORESOURCE_MEM)
p = &iomem_resource;
else if (resource_type(r) == IORESOURCE_IO)
p = &ioport_resource;
}
if (p && insert_resource(p, r)) { /*将资源添加到资源树中*/
printk(KERN_ERR
"%s: failed to claim resource %d\n",
dev_name(&pdev->dev), i);
ret = -EBUSY;
goto failed;
}
}
pr_debug("Registering platform device '%s'. Parent at %s\n",
dev_name(&pdev->dev), dev_name(pdev->dev.parent));
ret = device_add(&pdev->dev); /*添加设备*/
if (ret == 0)
return ret;
failed:
while (--i >= 0) {
struct resource *r = &pdev->resource[i];
unsigned long type = resource_type(r);
if (type == IORESOURCE_MEM || type == IORESOURCE_IO)
release_resource(r);
}
return ret;
}
EXPORT_SYMBOL_GPL(platform_device_add);
在这个函数的最后赫然出现了device_add函数。我们回忆下在6.1节中device_register的注册过程,该函数只调用了两个函数,一个是device_initialize函数,另一个就是device_add。
本节的platform_device_register函数,首先也是调用了device_initialize,但是随后他做了一些其他的工作,最后调用了device_add。
那么这个"其他的工作"干了些什么呢?
首先,它将该SPI主控制对应的平台设备的父设备设为虚拟的platform设备(platform_bus),然后将该平台设备挂在至platform总线(platform_bus_type)上,这两步尤为重要,后面我们将看到。
然后,调用了dev_set_name设置了pdev->dev-kobj.name,也就是该设备对象的名字,这里的名字为s3c2410-spi.0,这个名字将被用来建立一个目录。
最后,将平台的相关资源添加到资源树中。这不是本篇文章讨论的重点所在,所以不做过多说明。
在"其他的工作""干完之后,调用了device_add函数。那么后面的函数调用过程将和6.2小结的一致。
由于“其他的工作”的原因,实际执行的过程和结果将有所区别。我们来分析下。
6.3.3 不一样device_add调用结果
首先,在device_add被调用之前,有若干个非常重要的条件已经被设置了。如下:
pdev->dev->kobj.kset = devices_kset
pdev->dev-.parent = &platform_bus
pdev->dev.bus = &platform_bus_type
set_up函数执行时,由于参数parent为&platform_bus,因此最后将设置pdev->dev->kobj.parent = platform_bus.kobj。平台设备对象的父对象为虚拟的platform设备。
kobject_add函数执行时,由于参数parent的存在,将在parent对象所对应的目录下创建另一个目录。parent对象代表目录/sys/devices/下的platform,因此将在/sys/devices/platform下建立目录s3c2410-spi.0。
device_create_file建立属性文件uevent。
bus_add_device函数执行时,由于dev.bus 为&platform_bus_type,因此将建立三个symlink。
/sys/devices/platform/s3c2410-spi.0下建立链接subsystem和bus,他们指向/sys/bus/platform。
/sys/bus/platform/devices/下建立链接s3c2410-spi.0,指向/sys/devices/platform/s3c2410-spi.0。
dpm_sysfs_add函数在/sys/devices/platform/s3c2410-spi.0下建立子目录power,并在该子目录下建立属性文件wakeup。
执行到这里时,sysfs已将内核中新添加的SPI主控制器平台设备呈现出来了,我们来验证下。
[root@yj423 s3c2410-spi.0]#pwd
/sys/devices/platform/s3c2410-spi.0
[root@yj423 s3c2410-spi.0]#ll
lrwxrwxrwx 1 root root 0 Jan 1 00:29 bus -> ../../../bus/platform
lrwxrwxrwx 1 root root 0 Jan 1 00:29 driver -> ../../../bus/platform/drivers/s3c2410-spi
-r--r--r-- 1 root root 4096 Jan 1 00:29 modalias
drwxr-xr-x 2 root root 0 Jan 1 00:29 power
drwxr-xr-x 3 root root 0 Jan 1 00:00 spi0.0
drwxr-xr-x 3 root root 0 Jan 1 00:00 spi0.1
lrwxrwxrwx 1 root root 0 Jan 1 00:29 spi_master:spi0 -> ../../../class/spi_master/spi0
lrwxrwxrwx 1 root root 0 Jan 1 00:29 subsystem -> ../../../bus/platform
-rw-r--r-- 1 root root 4096 Jan 1 00:29 uevent
[root@yj423 devices]#pwd
/sys/bus/platform/devices
[root@yj423 devices]#ll s3c2410-spi.0
lrwxrwxrwx 1 root root 0 Jan 1 00:44 s3c2410-spi.0 -> ../../../devices/platform/s3c2410-spi.0
通过sysfs将设备驱动的模型层次呈现在用户空间以后,将更新内核的设备模型之间的关系,这是通过修改链表的指向来完成的。
bus_attach_device函数执行时,将设备添加到总线的设备链表中,同时也会尝试绑定驱动,不过会失败。
接着,由于dev->parent的存在,将SPI主控制器设备添加到父设备platform虚拟设备的儿子链表中。
7. driver举例
我们已经介绍过platform总线的注册,也讲述了SPI主控制器设备作为平台设备的注册过程,在本节,将描述SPI主控制器的platform驱动是如何注册的。
7.1 s3c24xx_spi_init
下列代码位于drivers/spi/spi_s3c24xx.c。
MODULE_ALIAS("platform:s3c2410-spi");
static struct platform_driver s3c24xx_spi_driver = {
.remove = __exit_p(s3c24xx_spi_remove),
.suspend = s3c24xx_spi_suspend,
.resume = s3c24xx_spi_resume,
.driver = {
.name = "s3c2410-spi",
.owner = THIS_MODULE,
},
};
static int __init s3c24xx_spi_init(void)
{
return platform_driver_probe(&s3c24xx_spi_driver, s3c24xx_spi_probe);//设备不可热插拔,所以使用该函数,而不是platform_driver_register
}
驱动注册通过调用platform_driver_probe来完成。
注意:driver.name字段使用来匹配设备的,该字段必须和6.3节一开始给出的pdev.name字段相同。
7.2 platform_driver_probe
下列代码位于drivers/base/platform.c。
/**
* platform_driver_probe - register driver for non-hotpluggable device
* @drv: platform driver structure
* @probe: the driver probe routine, probably from an __init section
*
* Use this instead of platform_driver_register() when you know the device
* is not hotpluggable and has already been registered, and you want to
* remove its run-once probe() infrastructure from memory after the driver
* has bound to the device.
*
* One typical use for this would be with drivers for controllers integrated
* into system-on-chip processors, where the controller devices have been
* configured as part of board setup.
*
* Returns zero if the driver registered and bound to a device, else returns
* a negative error code and with the driver not registered.
*/
int __init_or_module platform_driver_probe(struct platform_driver *drv,
int (*probe)(struct platform_device *))
{
int retval, code;
/* temporary section violation during probe() */
drv->probe = probe;
retval = code = platform_driver_register(drv); /*注册platform驱动*/
/* Fixup that section violation, being paranoid about code scanning
* the list of drivers in order to probe new devices. Check to see
* if the probe was successful, and make sure any forced probes of
* new devices fail.
*/
spin_lock(&platform_bus_type.p->klist_drivers.k_lock);
drv->probe = NULL;
if (code == 0 && list_empty(&drv->driver.p->klist_devices.k_list))
retval = -ENODEV;
drv->driver.probe = platform_drv_probe_fail;
spin_unlock(&platform_bus_type.p->klist_drivers.k_lock);
if (code != retval)
platform_driver_unregister(drv);
return retval;
}
EXPORT_SYMBOL_GPL(platform_driver_probe);
这里的重点是platform_driver_register,由它来完成了platform驱动的注册。
7.3 platform_driver_register
/**
* platform_driver_register
* @drv: platform driver structure
*/
int platform_driver_register(struct platform_driver *drv)
{
drv->driver.bus = &platform_bus_type;
if (drv->probe)
drv->driver.probe = platform_drv_probe;
if (drv->remove)
drv->driver.remove = platform_drv_remove;
if (drv->shutdown)
drv->driver.shutdown = platform_drv_shutdown;
if (drv->suspend)
drv->driver.suspend = platform_drv_suspend;
if (drv->resume)
drv->driver.resume = platform_drv_resume;
return driver_register(&drv->driver); /*驱动注册*/
}
EXPORT_SYMBOL_GPL(platform_driver_register);
driver_register函数就是driver注册的核心函数。需要注意的是,在调用函数之前,将该驱动所挂载的总线设置为platform总线(platform_bus_type)。
7.4 driver_register
下列代码位于drivers/base/driver.c。
/**
* driver_register - register driver with bus
* @drv: driver to register
*
* We pass off most of the work to the bus_add_driver() call,
* since most of the things we have to do deal with the bus
* structures.
*/
int driver_register(struct device_driver *drv)
{
int ret;
struct device_driver *other;
BUG_ON(!drv->bus->p);
if ((drv->bus->probe && drv->probe) ||
(drv->bus->remove && drv->remove) ||
(drv->bus->shutdown && drv->shutdown))
printk(KERN_WARNING "Driver '%s' needs updating - please use "
"bus_type methods\n", drv->name);
other = driver_find(drv->name, drv->bus);/*用驱动名字来搜索在该总线上驱动是否已经存在*/
if (other) { /*存在则报错*/
put_driver(other);
printk(KERN_ERR "Error: Driver '%s' is already registered, "
"aborting...\n", drv->name);
return -EEXIST;
}
ret = bus_add_driver(drv); /*将驱动添加到一个总线中*/
if (ret)
return ret;
ret = driver_add_groups(drv, drv->groups); /*建立属性组文件*/
if (ret)
bus_remove_driver(drv);
return ret;
}
EXPORT_SYMBOL_GPL(driver_register);
这里主要调用两个函数driver_find和bus_add_driver。前者将通过总线来搜索该驱动是否存在,后者将添加驱动到总线中。
接下来就分析这两个函数。
7.5 driver_find
下列代码位于drivers/base/driver.c。
/**
* driver_find - locate driver on a bus by its name.
* @name: name of the driver.
* @bus: bus to scan for the driver.
*
* Call kset_find_obj() to iterate over list of drivers on
* a bus to find driver by name. Return driver if found.
*
* Note that kset_find_obj increments driver's reference count.
*/
struct device_driver *driver_find(const char *name, struct bus_type *bus)
{
struct kobject *k = kset_find_obj(bus->p->drivers_kset, name);
struct driver_private *priv;
if (k) {
priv = to_driver(k);
return priv->driver;
}
return NULL;
}
EXPORT_SYMBOL_GPL(driver_find);
/**
* kset_find_obj - search for object in kset.
* @kset: kset we're looking in.
* @name: object's name.
*
* Lock kset via @kset->subsys, and iterate over @kset->list,
* looking for a matching kobject. If matching object is found
* take a reference and return the object.
*/
struct kobject *kset_find_obj(struct kset *kset, const char *name)
{
struct kobject *k;
struct kobject *ret = NULL;
spin_lock(&kset->list_lock);
list_for_each_entry(k, &kset->list, entry) {
if (kobject_name(k) && !strcmp(kobject_name(k), name)) {
ret = kobject_get(k);
break;
}
}
spin_unlock(&kset->list_lock);
return ret;
}
这里调用了kset_find_obj函数,传入的实参bus->p->drivers_kset,它对应的就是/sys/bus/platform/下的drivers目录,然后通过链表,它将搜索该目录下的所有文件,来寻找是否有名为s3c2410-spi的文件。还记得吗? kobject就是一个文件对象。如果没有找到将返回NULL,接着将调用bus_add_driver把驱动注册进内核。
7.6 bus_add_driver
下列代码位于drivers/base/bus.c
/**
* bus_add_driver - Add a driver to the bus.
* @drv: driver.
*/
int bus_add_driver(struct device_driver *drv)
{
struct bus_type *bus;
struct driver_private *priv;
int error = 0;
bus = bus_get(drv->bus); /*增加引用计数获取bus_type*/
if (!bus)
return -EINVAL;
pr_debug("bus: '%s': add driver %s\n", bus->name, drv->name);
priv = kzalloc(sizeof(*priv), GFP_KERNEL); /*分配driver_private结构体*/
if (!priv) {
error = -ENOMEM;
goto out_put_bus;
}
/*初始化内核链表*/
klist_init(&priv->klist_devices, NULL, NULL);
/*相互保存*/
priv->driver = drv;
drv->p = priv;
/*设置该kobj属于那个kset*/
priv->kobj.kset = bus->p->drivers_kset;
error = kobject_init_and_add(&priv->kobj, &driver_ktype, NULL, /*parent=NULL*/
"%s", drv->name); /*执行完以后,会在bus/总线名/drivers/下建立名为drv->name的目录*/
if (error)
goto out_unregister;
if (drv->bus->p->drivers_autoprobe) {
error = driver_attach(drv); /*尝试绑定驱动和设备*/
if (error)
goto out_unregister;
}
/*添加该驱动到bus的内核链表中*/
klist_add_tail(&priv->knode_bus, &bus->p->klist_drivers);
module_add_driver(drv->owner, drv);/*?????????*/
/*创建属性,在bus/总线名/drivers/驱动名/下建立文件uevent*/
error = driver_create_file(drv, &driver_attr_uevent);
if (error) {
printk(KERN_ERR "%s: uevent attr (%s) failed\n",
__func__, drv->name);
}
/*利用bus->drv_attrs创建属性,位于bus/总线名/drivers/驱动名/*/
error = driver_add_attrs(bus, drv);
if (error) {
/* How the hell do we get out of this pickle? Give up */
printk(KERN_ERR "%s: driver_add_attrs(%s) failed\n",
__func__, drv->name);
}
/*创建属性,在bus/总线名/drivers/驱动名/下建立文件bind和unbind*/
error = add_bind_files(drv);
if (error) {
/* Ditto */
printk(KERN_ERR "%s: add_bind_files(%s) failed\n",
__func__, drv->name);
}
/*通知用户空间???*/
kobject_uevent(&priv->kobj, KOBJ_ADD);
return 0;
out_unregister:
kfree(drv->p);
drv->p = NULL;
kobject_put(&priv->kobj);
out_put_bus:
bus_put(bus);
return error;
}
在设置driver的kobj.kset为drivers目录所对应的kset之后,调用了kobject_init_and_add,我们来看下。
7.6.1 kobject_init_and_add
下列代码位于lib/kobject.c。
/**
* kobject_init_and_add - initialize a kobject structure and add it to the kobject hierarchy
* @kobj: pointer to the kobject to initialize
* @ktype: pointer to the ktype for this kobject.
* @parent: pointer to the parent of this kobject.
* @fmt: the name of the kobject.
*
* This function combines the call to kobject_init() and
* kobject_add(). The same type of error handling after a call to
* kobject_add() and kobject lifetime rules are the same here.
*/
int kobject_init_and_add(struct kobject *kobj, struct kobj_type *ktype,
struct kobject *parent, const char *fmt, ...)
{
va_list args;
int retval;
kobject_init(kobj, ktype);
va_start(args, fmt);
retval = kobject_add_varg(kobj, parent, fmt, args);
va_end(args);
return retval;
}
EXPORT_SYMBOL_GPL(kobject_init_and_add);
该函数中调用了两个函数,这两个函数分别在6.1.2和6.2.2中讲述过,这里不再赘述。
调用该函数时由于parent为NULL,但kobj.kset为drivers目录,所以将在/sys/bus/platform/drivers/下建立目录,名为s3c2410-spi。
我们来验证下:
[root@yj423 s3c2410-spi]#pwd
/sys/bus/platform/drivers/s3c2410-spi
接着由于drivers_autoprobe在bus_register执行的时候已经置1,将调用driver_attach。
7.6.2 driver_attach
下列代码位于drivers/base/dd.c。
/**
* driver_attach - try to bind driver to devices.
* @drv: driver.
*
* Walk the list of devices that the bus has on it and try to
* match the driver with each one. If driver_probe_device()
* returns 0 and the @dev->driver is set, we've found a
* compatible pair.
*/
int driver_attach(struct device_driver *drv)
{
return bus_for_each_dev(drv->bus, NULL, drv, __driver_attach);
}
EXPORT_SYMBOL_GPL(driver_attach);
该函数将调用bus_for_each_dev来寻找总线上的每个设备,这里的总线即为platform总线,然后尝试绑定设备。
这里需要注意的是最后一个参数__driver_attach,这是一个函数名,后面将会调用它。
/**
* bus_for_each_dev - device iterator.
* @bus: bus type.
* @start: device to start iterating from.
* @data: data for the callback.
* @fn: function to be called for each device.
*
* Iterate over @bus's list of devices, and call @fn for each,
* passing it @data. If @start is not NULL, we use that device to
* begin iterating from.
*
* We check the return of @fn each time. If it returns anything
* other than 0, we break out and return that value.
*
* NOTE: The device that returns a non-zero value is not retained
* in any way, nor is its refcount incremented. If the caller needs
* to retain this data, it should do, and increment the reference
* count in the supplied callback.
*/
int bus_for_each_dev(struct bus_type *bus, struct device *start,
void *data, int (*fn)(struct device *, void *))
{
struct klist_iter i;
struct device *dev;
int error = 0;
if (!bus)
return -EINVAL;
klist_iter_init_node(&bus->p->klist_devices, &i,
(start ? &start->p->knode_bus : NULL));
while ((dev = next_device(&i)) && !error)
error = fn(dev, data);
klist_iter_exit(&i);
return error;
}
EXPORT_SYMBOL_GPL(bus_for_each_dev);
通过klist将遍历该总线上的所有设备,并为其调用__driver_attach函数。
static int __driver_attach(struct device *dev, void *data)
{
struct device_driver *drv = data;
/*
* Lock device and try to bind to it. We drop the error
* here and always return 0, because we need to keep trying
* to bind to devices and some drivers will return an error
* simply if it didn't support the device.
*
* driver_probe_device() will spit a warning if there
* is an error.
*/
if (!driver_match_device(drv, dev))
return 0;
if (dev->parent) /* Needed for USB */
down(&dev->parent->sem);
down(&dev->sem);
if (!dev->driver)
driver_probe_device(drv, dev);
up(&dev->sem);
if (dev->parent)
up(&dev->parent->sem);
return 0;
}
首先调用了driver_match_device函数,该函数进会进行匹配,如果匹配成功将返回1。我们看下这个函数:
static inline int driver_match_device(struct device_driver *drv,
struct device *dev)
{
return drv->bus->match ? drv->bus->match(dev, drv) : 1;
}
这里直接调用了platform总线的match方法,我们来看下这个方法。
/**
* platform_match - bind platform device to platform driver.
* @dev: device.
* @drv: driver.
*
* Platform device IDs are assumed to be encoded like this:
* "<name><instance>", where <name> is a short description of the type of
* device, like "pci" or "floppy", and <instance> is the enumerated
* instance of the device, like '0' or '42'. Driver IDs are simply
* "<name>". So, extract the <name> from the platform_device structure,
* and compare it against the name of the driver. Return whether they match
* or not.
*/
static int platform_match(struct device *dev, struct device_driver *drv)
{
struct platform_device *pdev = to_platform_device(dev);
struct platform_driver *pdrv = to_platform_driver(drv);
/* match against the id table first */
if (pdrv->id_table)
return platform_match_id(pdrv->id_table, pdev) != NULL;
/* fall-back to driver name match */
return (strcmp(pdev->name, drv->name) == 0);
}
该方法的核心其实就是使用stcmp进行字符匹配,判断pdev->name和drv->name是否相等。
在本例中两者同为s3c2410-spi。因此匹配完成,返回1。
返回后,由于dev->driver为NULL,将调用driver_probe_device函数。我们来看下:
/**
* driver_probe_device - attempt to bind device & driver together
* @drv: driver to bind a device to
* @dev: device to try to bind to the driver
*
* This function returns -ENODEV if the device is not registered,
* 1 if the device is bound sucessfully and 0 otherwise.
*
* This function must be called with @dev->sem held. When called for a
* USB interface, @dev->parent->sem must be held as well.
*/
int driver_probe_device(struct device_driver *drv, struct device *dev)
{
int ret = 0;
if (!device_is_registered(dev))
return -ENODEV;
pr_debug("bus: '%s': %s: matched device %s with driver %s\n",
drv->bus->name, __func__, dev_name(dev), drv->name);
ret = really_probe(dev, drv);
return ret;
}
static inline int device_is_registered(struct device *dev)
{
return dev->kobj.state_in_sysfs;
}
该函数将调用really_probe来绑定设备和它的驱动。
static int really_probe(struct device *dev, struct device_driver *drv)
{
int ret = 0;
atomic_inc(&probe_count);
pr_debug("bus: '%s': %s: probing driver %s with device %s\n",
drv->bus->name, __func__, drv->name, dev_name(dev));
WARN_ON(!list_empty(&dev->devres_head));
dev->driver = drv;
if (driver_sysfs_add(dev)) { /*创建两个symlink,更新sysfs*/
printk(KERN_ERR "%s: driver_sysfs_add(%s) failed\n",
__func__, dev_name(dev));
goto probe_failed;
}
if (dev->bus->probe) {
ret = dev->bus->probe(dev);/*调用总线的probe方法*/
if (ret)
goto probe_failed;
} else if (drv->probe) {
ret = drv->probe(dev); /*调用驱动的probe方法*/
if (ret)
goto probe_failed;
}
driver_bound(dev); /*绑定设备和驱动*/
ret = 1;
pr_debug("bus: '%s': %s: bound device %s to driver %s\n",
drv->bus->name, __func__, dev_name(dev), drv->name);
goto done;
probe_failed:
devres_release_all(dev);
driver_sysfs_remove(dev);
dev->driver = NULL;
if (ret != -ENODEV && ret != -ENXIO) {
/* driver matched but the probe failed */
printk(KERN_WARNING
"%s: probe of %s failed with error %d\n",
drv->name, dev_name(dev), ret);
}
/*
* Ignore errors returned by ->probe so that the next driver can try
* its luck.
*/
ret = 0;
done:
atomic_dec(&probe_count);
wake_up(&probe_waitqueue);
return ret;
}
在这个函数中调用4个函数。
第一个函数driver_sysfs_add将更新sysfs。
static int driver_sysfs_add(struct device *dev)
{
int ret;
/* 在/sys/bus/XXX/drivers/XXX目录下建立symlink,链接名为kobj->name,
链接指向/sys/devices/platform/XXX */
ret = sysfs_create_link(&dev->driver->p->kobj, &dev->kobj,
kobject_name(&dev->kobj));
if (ret == 0) {
/* 在/sys/devices/platform/XXX/下建立symlink,链接名为driver,
指向/sys/bus/xxx/drivers目录下的某个目录*/
ret = sysfs_create_link(&dev->kobj, &dev->driver->p->kobj,
"driver");
if (ret)
sysfs_remove_link(&dev->driver->p->kobj,
kobject_name(&dev->kobj));
}
return ret;
}
执行完以后,建立了两个链接。
在/sys/bus/platform/drivers/s3c2410-spi下建立链接,指向/sys/devices/platform/s3c2410-spi.0
在/sys/devices/platform/s3c2410-spi.0下建立链接,指向/sys/devices/platform/s3c2410-spi.0。
这样就在用户空间呈现出驱动和设备的关系了。我们来验证下。
[root@yj423 s3c2410-spi]#pwd
/sys/bus/platform/drivers/s3c2410-spi
[root@yj423 s3c2410-spi]#ll s3c2410-spi.0
lrwxrwxrwx 1 root root 0 Jan 1 02:28 s3c2410-spi.0 -> ../../../../devices/platform/s3c2410-spi.0
[root@yj423 s3c2410-spi.0]#pwd
/sys/devices/platform/s3c2410-spi.0
[root@yj423 s3c2410-spi.0]#ll driver
lrwxrwxrwx 1 root root 0 Jan 1 02:26 driver -> ../../../bus/platform/drivers/s3c2410-spi
第2个函数执行总线的probe方法,由于platform总线没有提供probe方法,因此不执行。
第3个函数执行驱动的probe方法,驱动提供了probe,因此调用它,该函数的细节超过了本文的讨论内容,所以略过。
第4个函数执行driver_bound,用来绑定设备和驱动,来看下这个函数。
static void driver_bound(struct device *dev)
{
if (klist_node_attached(&dev->p->knode_driver)) {
printk(KERN_WARNING "%s: device %s already bound\n",
__func__, kobject_name(&dev->kobj));
return;
}
pr_debug("driver: '%s': %s: bound to device '%s'\n", dev_name(dev),
__func__, dev->driver->name);
if (dev->bus)
blocking_notifier_call_chain(&dev->bus->p->bus_notifier,
BUS_NOTIFY_BOUND_DRIVER, dev);
klist_add_tail(&dev->p->knode_driver, &dev->driver->p->klist_devices);
}
其实,所谓的绑定,就是将设备的驱动节点添加到驱动支持的设备链表中。
至此,通过内核链表,这个platform device 和platform driver 已经绑定完成,将继续遍历内核链表尝试匹配和绑定,直到链表结束。
在driver_attach执行完毕以后,bus_add_driver函数还有些剩余工作要完成。
首先,将驱动添加到总线的驱动列表中。
接着,如果定义了驱动属性文件,则创建。
最后,在/sys/bus/platform/drivers/s3c2410-spi/下建立属性文件uevent,并在同一目录下建立文件bind和unbind。
我们来验证下:
[root@yj423 s3c2410-spi]#pwd
/sys/bus/platform/drivers/s3c2410-spi
[root@yj423 s3c2410-spi]#ls
bind s3c2410-spi.0 uevent unbind
7.7 小结
在本节中,我们看到了platform driver是如何注册到内核中,在注册过程中,通过更新了sysfs,向用户空间展示总线,设备和驱动之间的关系。
同时,还更新了链表的指向,在内核中体现了同样的关系。
最后以platform driver的注册过程结束本章。
8. sysfs底层函数
下面讲述的内容将基于VFS,有关VFS的基本内容超过本文的范围,请参考<<深入理解Linux内核>>一书的第12章。
在前面讲述的过程中,我们知道设备驱动模型是如何通过kobject将总线,设备和驱动间的层次关系在用户空间呈现出来的。事实上,就是通过目录,文件和symlink来呈现相互之间的关系。在前面的叙述中,我们并没有对目录,文件和symlink的创建进行 讲解,本章就对这些底层函数进行讲解。在讲解这些函数之前,我们先来看下,sysfs文件系统是如何注册的。
8.1 注册sysfs文件系统
sysfs文件系统的注册是调用sysfs_init函数来完成的,该函数在内核启动阶段被调用,我们来看下大致函数调用流程,这里不作分析。
start_kernel( ) -> vfs_caches_init( ) -> mnt_init( ) -> mnt_init( ) -> sysfs_init( )。
int __init sysfs_init(void)
{
int err = -ENOMEM;
/*建立cache,名字为sysfs_dir_cache*/
sysfs_dir_cachep = kmem_cache_create("sysfs_dir_cache",
sizeof(struct sysfs_dirent),
0, 0, NULL);
if (!sysfs_dir_cachep)
goto out;
err = sysfs_inode_init();
if (err)
goto out_err;
/*注册文件系统*/
err = register_filesystem(&sysfs_fs_type);
if (!err) {
/*注册成功,加载文件系统*/
sysfs_mount = kern_mount(&sysfs_fs_type);
if (IS_ERR(sysfs_mount)) {
printk(KERN_ERR "sysfs: could not mount!\n");
err = PTR_ERR(sysfs_mount);
sysfs_mount = NULL;
unregister_filesystem(&sysfs_fs_type);
goto out_err;
}
} else
goto out_err;
out:
return err;
out_err:
kmem_cache_destroy(sysfs_dir_cachep);
sysfs_dir_cachep = NULL;
goto out;
}
static struct file_system_type sysfs_fs_type = {
.name = "sysfs",
.get_sb = sysfs_get_sb,
.kill_sb = kill_anon_super,
};
8.1.1 register_filesystem
下列代码位于fs/filesystems.c。
/**
* register_filesystem - register a new filesystem
* @fs: the file system structure
*
* Adds the file system passed to the list of file systems the kernel
* is aware of for mount and other syscalls. Returns 0 on success,
* or a negative errno code on an error.
*
* The &struct file_system_type that is passed is linked into the kernel
* structures and must not be freed until the file system has been
* unregistered.
*/
int register_filesystem(struct file_system_type * fs)
{
int res = 0;
struct file_system_type ** p;
BUG_ON(strchr(fs->name, '.'));
if (fs->next)
return -EBUSY;
INIT_LIST_HEAD(&fs->fs_supers);
write_lock(&file_systems_lock);
p = find_filesystem(fs->name, strlen(fs->name)); /*查找要住的文件是同是否存在,返回位置*/
if (*p)
res = -EBUSY; /*该文件系统已存在,返回error*/
else
*p = fs; /*将新的文件系统加入到链表中*/
write_unlock(&file_systems_lock);
return res;
}
static struct file_system_type **find_filesystem(const char *name, unsigned len)
{
struct file_system_type **p;
for (p=&file_systems; *p; p=&(*p)->next)
if (strlen((*p)->name) == len &&
strncmp((*p)->name, name, len) == 0)
break;
return p;
}
该函数将调用函数file_system_type,此函数根据name字段(sysfs)来查找要注册的文件系统是否已经存在。
如果不存在,表示还未注册,则将新的fs添加到链表中,链表的第一项为全局变量file_systems。
该全局变量为单项链表,所有已注册的文件系统都被插入到这个链表当中。
8.1.2 kern_mount函数
下列代码位于include/linux/fs.h
#define kern_mount(type) kern_mount_data(type, NULL)
下列代码位于fs/sysfs/mount.c
struct vfsmount *kern_mount_data(struct file_system_type *type, void *data)
{
return vfs_kern_mount(type, MS_KERNMOUNT, type->name, data);
}
EXPORT_SYMBOL_GPL(kern_mount_data);
kern_mount实际上最后是调用了vfs_kern_mount函数。我们来看下:
struct vfsmount *
vfs_kern_mount(struct file_system_type *type, int flags, const char *name, void *data)
{
struct vfsmount *mnt;
char *secdata = NULL;
int error;
if (!type)
return ERR_PTR(-ENODEV);
error = -ENOMEM;
mnt = alloc_vfsmnt(name); /*分配struct vfsmount*/
if (!mnt)
goto out;
if (data && !(type->fs_flags & FS_BINARY_MOUNTDATA)) {
secdata = alloc_secdata();
if (!secdata)
goto out_mnt;
error = security_sb_copy_data(data, secdata);
if (error)
goto out_free_secdata;
}
/*get_sb方法,分配superblock对象,并初始化*/
error = type->get_sb(type, flags, name, data, mnt);
if (error < 0)
goto out_free_secdata;
BUG_ON(!mnt->mnt_sb);
error = security_sb_kern_mount(mnt->mnt_sb, flags, secdata);
if (error)
goto out_sb;
mnt->mnt_mountpoint = mnt->mnt_root;/*设置挂载点的dentry*/
mnt->mnt_parent = mnt; /*设置所挂载的fs为自己本身*/
up_write(&mnt->mnt_sb->s_umount);
free_secdata(secdata);
return mnt;
out_sb:
dput(mnt->mnt_root);
deactivate_locked_super(mnt->mnt_sb);
out_free_secdata:
free_secdata(secdata);
out_mnt:
free_vfsmnt(mnt);
out:
return ERR_PTR(error);
}
该函数在首先调用alloc_vfsmnt来分配struct vfsmount结构,并做了一些初试化工作。
下列函数位于fs/super.c
struct vfsmount *alloc_vfsmnt(const char *name)
{
struct vfsmount *mnt = kmem_cache_zalloc(mnt_cache, GFP_KERNEL);
if (mnt) {
int err;
err = mnt_alloc_id(mnt); /*设置mnt->mnt_id*/
if (err)
goto out_free_cache;
if (name) {
mnt->mnt_devname = kstrdup(name, GFP_KERNEL); /*拷贝name,并赋值*/
if (!mnt->mnt_devname)
goto out_free_id;
}
atomic_set(&mnt->mnt_count, 1);
INIT_LIST_HEAD(&mnt->mnt_hash);
INIT_LIST_HEAD(&mnt->mnt_child);
INIT_LIST_HEAD(&mnt->mnt_mounts);
INIT_LIST_HEAD(&mnt->mnt_list);
INIT_LIST_HEAD(&mnt->mnt_expire);
INIT_LIST_HEAD(&mnt->mnt_share);
INIT_LIST_HEAD(&mnt->mnt_slave_list);
INIT_LIST_HEAD(&mnt->mnt_slave);
atomic_set(&mnt->__mnt_writers, 0);
}
return mnt;
out_free_id:
mnt_free_id(mnt);
out_free_cache:
kmem_cache_free(mnt_cache, mnt);
return NULL;
}
分配好结构体以后,由于参数data为NULL,将直接调用文件系统类型提供的get_sb方法,该方法就是函数sysfs_get_sb。我们来看下:
下列函数位于fs/sysfs/mount.c。
static int sysfs_get_sb(struct file_system_type *fs_type,
int flags, const char *dev_name, void *data, struct vfsmount *mnt)
{
return get_sb_single(fs_type, flags, data, sysfs_fill_super, mnt);
}
这里直接调用了get_sb_single函数,注意这里的第4个实参sysfs_fill_super,该参数是函数名,后面将会调用该函数。
该函数将分配sysfs文件系统的superblock,获取文件系统根目录的inode和dentry。
该函数的执行过程相当复杂,在下一节单独讲述。
8.2 get_sb_single函数
下列函数位于fs/sysfs/mount.c。
int get_sb_single(struct file_system_type *fs_type,
int flags, void *data,
int (*fill_super)(struct super_block *, void *, int),
struct vfsmount *mnt)
{
struct super_block *s;
int error;
/*查找或者创建super_block*/
s = sget(fs_type, compare_single, set_anon_super, NULL);
if (IS_ERR(s))
return PTR_ERR(s);
if (!s->s_root) { /*没有根目录dentry*/
s->s_flags = flags;
/*获取root( / )的 inode和dentry*/
error = fill_super(s, data, flags & MS_SILENT ? 1 : 0);
if (error) {
deactivate_locked_super(s);
return error;
}
s->s_flags |= MS_ACTIVE;
}
do_remount_sb(s, flags, data, 0);
simple_set_mnt(mnt, s); /*设置vfsmount的superblock和根dentry*/
return 0;
}
EXPORT_SYMBOL(get_sb_single);
8.2.1 sget函数
首先调用了sget函数来查找是否
下列函数位于fs/super.c。
/**
* sget - find or create a superblock
* @type: filesystem type superblock should belong to
* @test: comparison callback
* @set: setup callback
* @data: argument to each of them
*/
struct super_block *sget(struct file_system_type *type,
int (*test)(struct super_block *,void *),
int (*set)(struct super_block *,void *),
void *data)
{
struct super_block *s = NULL;
struct super_block *old;
int err;
retry:
spin_lock(&sb_lock);
if (test) {
/*遍历所有属于该文件系统的super_block*/
list_for_each_entry(old, &type->fs_supers, s_instances) {
if (!test(old, data))
continue;
if (!grab_super(old))
goto retry;
if (s) {
up_write(&s->s_umount);
destroy_super(s);
}
return old;
}
}
if (!s) {
spin_unlock(&sb_lock);
s = alloc_super(type); /*创建新的super_block并初始化*/
if (!s)
return ERR_PTR(-ENOMEM);
goto retry;
}
err = set(s, data); /*设置s->s_dev */
if (err) {
spin_unlock(&sb_lock);
up_write(&s->s_umount);
destroy_super(s);
return ERR_PTR(err);
}
s->s_type = type;
strlcpy(s->s_id, type->name, sizeof(s->s_id)); /*拷贝name*/
list_add_tail(&s->s_list, &super_blocks); /*将新的super_block添加到链表头super_blocks中*/
list_add(&s->s_instances, &type->fs_supers); /*将新的super_block添加到相应的文件系统类型的链表中*/
spin_unlock(&sb_lock);
get_filesystem(type);
return s;
}
EXPORT_SYMBOL(sget);
该函数将遍历属于sysfs文件系统的所有superblock,本例中由于之前没有任何superblock创建,遍历立即结束。
然后调用alloc_super函数来创建新的struct super_block。
下列函数位于fs/super.c。
/**
* alloc_super - create new superblock
* @type: filesystem type superblock should belong to
*
* Allocates and initializes a new &struct super_block. alloc_super()
* returns a pointer new superblock or %NULL if allocation had failed.
*/
static struct super_block *alloc_super(struct file_system_type *type)
{
struct super_block *s = kzalloc(sizeof(struct super_block), GFP_USER);/*分配并清0super_block*/
static struct super_operations default_op;
if (s) {
if (security_sb_alloc(s)) {
kfree(s);
s = NULL;
goto out;
}
INIT_LIST_HEAD(&s->s_dirty);
INIT_LIST_HEAD(&s->s_io);
INIT_LIST_HEAD(&s->s_more_io);
INIT_LIST_HEAD(&s->s_files);
INIT_LIST_HEAD(&s->s_instances);
INIT_HLIST_HEAD(&s->s_anon);
INIT_LIST_HEAD(&s->s_inodes);
INIT_LIST_HEAD(&s->s_dentry_lru);
INIT_LIST_HEAD(&s->s_async_list);
init_rwsem(&s->s_umount);
mutex_init(&s->s_lock);
lockdep_set_class(&s->s_umount, &type->s_umount_key);
/*
* The locking rules for s_lock are up to the
* filesystem. For example ext3fs has different
* lock ordering than usbfs:
*/
lockdep_set_class(&s->s_lock, &type->s_lock_key);
/*
* sget() can have s_umount recursion.
*
* When it cannot find a suitable sb, it allocates a new
* one (this one), and tries again to find a suitable old
* one.
*
* In case that succeeds, it will acquire the s_umount
* lock of the old one. Since these are clearly distrinct
* locks, and this object isn't exposed yet, there's no
* risk of deadlocks.
*
* Annotate this by putting this lock in a different
* subclass.
*/
down_write_nested(&s->s_umount, SINGLE_DEPTH_NESTING);
s->s_count = S_BIAS;
atomic_set(&s->s_active, 1);
mutex_init(&s->s_vfs_rename_mutex);
mutex_init(&s->s_dquot.dqio_mutex);
mutex_init(&s->s_dquot.dqonoff_mutex);
init_rwsem(&s->s_dquot.dqptr_sem);
init_waitqueue_head(&s->s_wait_unfrozen);
s->s_maxbytes = MAX_NON_LFS;
s->dq_op = sb_dquot_ops;
s->s_qcop = sb_quotactl_ops;
s->s_op = &default_op;
s->s_time_gran = 1000000000;
}
out:
return s;
}
分配完以后,调用作为参数传入的函数指针set,也就是set_anon_super函数,该函数用来设置s->s_dev。
下列函数位于fs/super.c。
int set_anon_super(struct super_block *s, void *data)
{
int dev;
int error;
retry:
if (ida_pre_get(&unnamed_dev_ida, GFP_ATOMIC) == 0)/*分配ID号*/
return -ENOMEM;
spin_lock(&unnamed_dev_lock);
error = ida_get_new(&unnamed_dev_ida, &dev);/*获取ID号,保存在dev中*/
spin_unlock(&unnamed_dev_lock);
if (error == -EAGAIN)
/* We raced and lost with another CPU. */
goto retry;
else if (error)
return -EAGAIN;
if ((dev & MAX_ID_MASK) == (1 << MINORBITS)) {
spin_lock(&unnamed_dev_lock);
ida_remove(&unnamed_dev_ida, dev);
spin_unlock(&unnamed_dev_lock);
return -EMFILE;
}
s->s_dev = MKDEV(0, dev & MINORMASK); /*构建设备号*/
return 0;
}
8.2.2 sysfs_fill_super函数
分配了super_block之后,将判断该super_block是否有root dentry。本例中,显然没有。然后调用形参fill_super指向的函数,也就是sysfs_fill_super函数。
下列函数位于fs/sysfs/mount.c。
struct super_block * sysfs_sb = NULL;
static int sysfs_fill_super(struct super_block *sb, void *data, int silent)
{
struct inode *inode;
struct dentry *root;
sb->s_blocksize = PAGE_CACHE_SIZE; /*4KB*/
sb->s_blocksize_bits = PAGE_CACHE_SHIFT; /*4KB*/
sb->s_magic = SYSFS_MAGIC; /*0x62656572*/
sb->s_op = &sysfs_ops;
sb->s_time_gran = 1;
sysfs_sb = sb; /*sysfs_sb即为sysfs的super_block*/
/* get root inode, initialize and unlock it */
mutex_lock(&sysfs_mutex);
inode = sysfs_get_inode(&sysfs_root); /*sysfs_root即为sysfs所在的根目录的dirent,,获取inode*/
mutex_unlock(&sysfs_mutex);
if (!inode) {
pr_debug("sysfs: could not get root inode\n");
return -ENOMEM;
}
/* instantiate and link root dentry */
root = d_alloc_root(inode); /*为获得的根inode分配root(/) dentry*/
if (!root) {
pr_debug("%s: could not get root dentry!\n",__func__);
iput(inode);
return -ENOMEM;
}
root->d_fsdata = &sysfs_root;
sb->s_root = root; /*保存superblock的根dentry*/
return 0;
}
struct sysfs_dirent sysfs_root = { /*sysfs_root即为sysfs所在的根目录的dirent*/
.s_name = "",
.s_count = ATOMIC_INIT(1),
.s_flags = SYSFS_DIR,
.s_mode = S_IFDIR | S_IRWXU | S_IRUGO | S_IXUGO,
.s_ino = 1,
};
在设置了一些字段后,设置了sysfs_sb这个全局变量,该全局变量表示的就是sysfs的super_block。
随后,调用了sysfs_get_inode函数,来获取sysfs的根目录的dirent。该函数的参数sysfs_root为全局变量,表示sysfs的根目录的sysfs_dirent。
我们看些这个sysfs_dirent数据结构:
/*
* sysfs_dirent - the building block of sysfs hierarchy. Each and
* every sysfs node is represented by single sysfs_dirent.
*
* As long as s_count reference is held, the sysfs_dirent itself is
* accessible. Dereferencing s_elem or any other outer entity
* requires s_active reference.
*/
struct sysfs_dirent {
atomic_t s_count;
atomic_t s_active;
struct sysfs_dirent *s_parent;
struct sysfs_dirent *s_sibling;
const char *s_name;
union {
struct sysfs_elem_dir s_dir;
struct sysfs_elem_symlink s_symlink;
struct sysfs_elem_attr s_attr;
struct sysfs_elem_bin_attr s_bin_attr;
};
unsigned int s_flags;
ino_t s_ino;
umode_t s_mode;
struct iattr *s_iattr;
};
其中比较关键的就是那个联合体,针对不同的形式(目录,symlink,属性文件和可执行文件)将使用不同的数据结构。
另外,sysfs_dirent将最为dentry的fs专有数据被保存下来,这一点会在下面中看到。
接着,在来看下sysfs_get_inode函数:
下列函数位于fs/sysfs/inode.c。
/**
* sysfs_get_inode - get inode for sysfs_dirent
* @sd: sysfs_dirent to allocate inode for
*
* Get inode for @sd. If such inode doesn't exist, a new inode
* is allocated and basics are initialized. New inode is
* returned locked.
*
* LOCKING:
* Kernel thread context (may sleep).
*
* RETURNS:
* Pointer to allocated inode on success, NULL on failure.
*/
struct inode * sysfs_get_inode(struct sysfs_dirent *sd)
{
struct inode *inode;
inode = iget_locked(sysfs_sb, sd->s_ino); /*在inode cache查找inode是否存在,不存在侧创建一个*/
if (inode && (inode->i_state & I_NEW)) /*如果是新创建的inode,则包含I_NEW*/
sysfs_init_inode(sd, inode);
return inode;
}
/**
* iget_locked - obtain an inode from a mounted file system
* @sb: super block of file system
* @ino: inode number to get
*
* iget_locked() uses ifind_fast() to search for the inode specified by @ino in
* the inode cache and if present it is returned with an increased reference
* count. This is for file systems where the inode number is sufficient for
* unique identification of an inode.
*
* If the inode is not in cache, get_new_inode_fast() is called to allocate a
* new inode and this is returned locked, hashed, and with the I_NEW flag set.
* The file system gets to fill it in before unlocking it via
* unlock_new_inode().
*/
struct inode *iget_locked(struct super_block *sb, unsigned long ino)
{
struct hlist_head *head = inode_hashtable + hash(sb, ino);
struct inode *inode;
inode = ifind_fast(sb, head, ino);/*在inode cache查找该inode*/
if (inode)
return inode; /*找到了该inode*/
/*
* get_new_inode_fast() will do the right thing, re-trying the search
* in case it had to block at any point.
*/
return get_new_inode_fast(sb, head, ino); /*分配一个新的inode*/
}
EXPORT_SYMBOL(iget_locked);
static void sysfs_init_inode(struct sysfs_dirent *sd, struct inode *inode)
{
struct bin_attribute *bin_attr;
inode->i_private = sysfs_get(sd);
inode->i_mapping->a_ops = &sysfs_aops;
inode->i_mapping->backing_dev_info = &sysfs_backing_dev_info;
inode->i_op = &sysfs_inode_operations;
inode->i_ino = sd->s_ino;
lockdep_set_class(&inode->i_mutex, &sysfs_inode_imutex_key);
if (sd->s_iattr) {
/* sysfs_dirent has non-default attributes
* get them for the new inode from persistent copy
* in sysfs_dirent
*/
set_inode_attr(inode, sd->s_iattr);
} else
set_default_inode_attr(inode, sd->s_mode);/*设置inode属性*/
/* initialize inode according to type */
switch (sysfs_type(sd)) {
case SYSFS_DIR:
inode->i_op = &sysfs_dir_inode_operations;
inode->i_fop = &sysfs_dir_operations;
inode->i_nlink = sysfs_count_nlink(sd);
break;
case SYSFS_KOBJ_ATTR:
inode->i_size = PAGE_SIZE;
inode->i_fop = &sysfs_file_operations;
break;
case SYSFS_KOBJ_BIN_ATTR:
bin_attr = sd->s_bin_attr.bin_attr;
inode->i_size = bin_attr->size;
inode->i_fop = &bin_fops;
break;
case SYSFS_KOBJ_LINK:
inode->i_op = &sysfs_symlink_inode_operations;
break;
default:
BUG();
}
unlock_new_inode(inode);
}
该函数首先调用了,iget_locked来查找该inode是否已存在,如果不存在则创建。如果是新创建的inode,则对inode进行初始化。
再获取了根目录的inode和sysfs_dirent后,调用d_alloc_root来获得dirent。
/**
* d_alloc_root - allocate root dentry
* @root_inode: inode to allocate the root for
*
* Allocate a root ("/") dentry for the inode given. The inode is
* instantiated and returned. %NULL is returned if there is insufficient
* memory or the inode passed is %NULL.
*/
struct dentry * d_alloc_root(struct inode * root_inode)
{
struct dentry *res = NULL;
if (root_inode) {
static const struct qstr name = { .name = "/", .len = 1 };
res = d_alloc(NULL, &name); /*分配struct dentry,没有父dentry*/
if (res) {
res->d_sb = root_inode->i_sb;
res->d_parent = res;
d_instantiated_instantiate(res, root_inode); /*绑定inode和dentry之间的关系*/
}
}
return res;
}
/**
* d_alloc - allocate a dcache entry
* @parent: parent of entry to allocate
* @name: qstr of the name
*
* Allocates a dentry. It returns %NULL if there is insufficient memory
* available. On a success the dentry is returned. The name passed in is
* copied and the copy passed in may be reused after this call.
*/
struct dentry *d_alloc(struct dentry * parent, const struct qstr *name)
{
struct dentry *dentry;
char *dname;
dentry = kmem_cache_alloc(dentry_cache, GFP_KERNEL);/*分配struct dentry*/
if (!dentry)
return NULL;
if (name->len > DNAME_INLINE_LEN-1) {
dname = kmalloc(name->len + 1, GFP_KERNEL);
if (!dname) {
kmem_cache_free(dentry_cache, dentry);
return NULL;
}
} else {
dname = dentry->d_iname;
}
dentry->d_name.name = dname;
dentry->d_name.len = name->len;
dentry->d_name.hash = name->hash;
memcpy(dname, name->name, name->len);
dname[name->len] = 0;
atomic_set(&dentry->d_count, 1);
dentry->d_flags = DCACHE_UNHASHED;
spin_lock_init(&dentry->d_lock);
dentry->d_inode = NULL;
dentry->d_parent = NULL;
dentry->d_sb = NULL;
dentry->d_op = NULL;
dentry->d_fsdata = NULL;
dentry->d_mounted = 0;
INIT_HLIST_NODE(&dentry->d_hash);
INIT_LIST_HEAD(&dentry->d_lru);
INIT_LIST_HEAD(&dentry->d_subdirs);
INIT_LIST_HEAD(&dentry->d_alias);
if (parent) { /*有父目录,则设置指针来表示关系*/
dentry->d_parent = dget(parent);
dentry->d_sb = parent->d_sb; /*根dentry的父对象为自己*/
} else {
INIT_LIST_HEAD(&dentry->d_u.d_child);
}
spin_lock(&dcache_lock);
if (parent) /*有父目录,则添加到父目录的儿子链表中*/
list_add(&dentry->d_u.d_child, &parent->d_subdirs);
dentry_stat.nr_dentry++;
spin_unlock(&dcache_lock);
return dentry;
}
/**
* d_instantiate - fill in inode information for a dentry
* @entry: dentry to complete
* @inode: inode to attach to this dentry
*
* Fill in inode information in the entry.
*
* This turns negative dentries into productive full members
* of society.
*
* NOTE! This assumes that the inode count has been incremented
* (or otherwise set) by the caller to indicate that it is now
* in use by the dcache.
*/
void d_instantiate(struct dentry *entry, struct inode * inode)
{
BUG_ON(!list_empty(&entry->d_alias));
spin_lock(&dcache_lock);
__d_instantiate(entry, inode);
spin_unlock(&dcache_lock);
security_d_instantiate(entry, inode);
}
/* the caller must hold dcache_lock */
static void __d_instantiate(struct dentry *dentry, struct inode *inode)
{
if (inode)
list_add(&dentry->d_alias, &inode->i_dentry);/*将dentry添加到inode的链表中*/
dentry->d_inode = inode; /*保存dentry对应的inode*/
fsnotify_d_instantiate(dentry, inode);
}
该函数首先调用了d_alloc来创建struct dentry,参数parent为NULL,既然是为根( / )建立dentry,自然没有父对象。
接着调用d_instantiate来绑定inode和dentry之间的关系。
在sysfs_fill_super函数执行的最后,将sysfs_root保存到了dentry->d_fsdata。
可见,在sysfs中用sysfs_dirent来表示目录,但是对于VFS,还是要使用dentry来表示目录。
8.2.3 do_remount_sb
下列代码位于fs/super.c。
/**
* do_remount_sb - asks filesystem to change mount options.
* @sb: superblock in question
* @flags: numeric part of options
* @data: the rest of options
* @force: whether or not to force the change
*
* Alters the mount options of a mounted file system.
*/
int do_remount_sb(struct super_block *sb, int flags, void *data, int force)
{
int retval;
int remount_rw;
#ifdef CONFIG_BLOCK
if (!(flags & MS_RDONLY) && bdev_read_only(sb->s_bdev))
return -EACCES;
#endif
if (flags & MS_RDONLY)
acct_auto_close(sb);
shrink_dcache_sb(sb);
fsync_super(sb);
/* If we are remounting RDONLY and current sb is read/write,
make sure there are no rw files opened */
if ((flags & MS_RDONLY) && !(sb->s_flags & MS_RDONLY)) {
if (force)
mark_files_ro(sb);
else if (!fs_may_remount_ro(sb))
return -EBUSY;
retval = vfs_dq_off(sb, 1);
if (retval < 0 && retval != -ENOSYS)
return -EBUSY;
}
remount_rw = !(flags & MS_RDONLY) && (sb->s_flags & MS_RDONLY);
if (sb->s_op->remount_fs) {
lock_super(sb);
retval = sb->s_op->remount_fs(sb, &flags, data);
unlock_super(sb);
if (retval)
return retval;
}
sb->s_flags = (sb->s_flags & ~MS_RMT_MASK) | (flags & MS_RMT_MASK);
if (remount_rw)
vfs_dq_quota_on_remount(sb);
return 0;
}
这个函数用来修改挂在选项,这个函数就不分析了,不是重点。
8.2.4simple_set_mnt
下列函数位于fs/namespace.c。
void simple_set_mnt(struct vfsmount *mnt, struct super_block *sb)
{
mnt->mnt_sb = sb;
mnt->mnt_root = dget(sb->s_root);
}
该函数设置了vfsmount的superblock和根dentry。
8.2.5 小结
这里,对sysfs的注册过程做一个总结。
sysfs_init函数调用过程示意图如下:
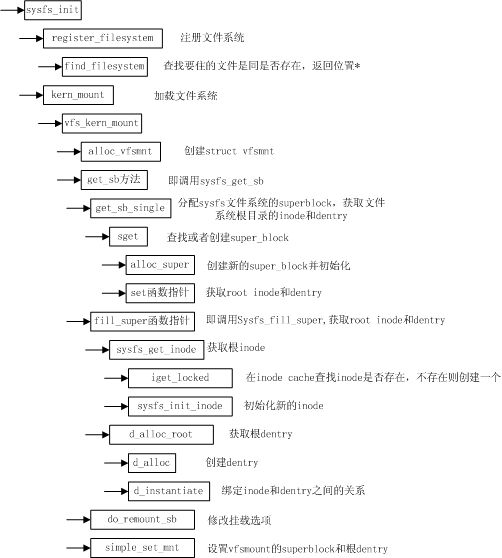
在整个过程中,先后使用和创建了许多struct
第一,根据file_system_type表示的sysfs文件系统的类型注册了sysfs。
第二,建立了vfsmount。
第三,创建了超级块super_block。
第四,根据sysfs_dirent表示的根目录,建立了inode。
最后,根据刚才建立的inode创建了dentry。
除了sysfs_dirent,其他5个结构体都是VFS中基本的数据结构,而sysfs_dirent则是特定于sysfs文件系统的数据结构。
8.3 创建目录
在前面的描述中,使用sysfs_create_dir在sysfs下建立一个目录。我们来看下这个函数是如何来建立目录的。
下列代码位于fs/sysfs/dir.c。
/**
* sysfs_create_dir - create a directory for an object.
* @kobj: object we're creating directory for.
*/
int sysfs_create_dir(struct kobject * kobj)
{
struct sysfs_dirent *parent_sd, *sd;
int error = 0;
BUG_ON(!kobj);
if (kobj->parent) /*如果有parent,获取parent对应的sys目录*/
parent_sd = kobj->parent->sd;
else /*没有则是在sys根目录*/
parent_sd = &sysfs_root;
error = create_dir(kobj, parent_sd, kobject_name(kobj), &sd);
if (!error)
kobj->sd = sd;
return error;
}
函数中,首先获取待建目录的父sysfs_dirent,然后将它作为参数 来调用create_dir函数。
很明显,就是要在父sysfs_dirent下建立新的sysfs_dirent,新建立的sysfs_dirent将保存到参数sd中。
下列代码位于fs/sysfs/dir.c。
static int create_dir(struct kobject *kobj, struct sysfs_dirent *parent_sd,
const char *name, struct sysfs_dirent **p_sd)
{
umode_t mode = S_IFDIR| S_IRWXU | S_IRUGO | S_IXUGO;
struct sysfs_addrm_cxt acxt;
struct sysfs_dirent *sd;
int rc;
/* allocate */ /*分配sysfs_dirent并初始化*/
sd = sysfs_new_dirent(name, mode, SYSFS_DIR);
if (!sd)
return -ENOMEM;
sd->s_dir.kobj = kobj; /*保存kobject对象*/
/* link in */
sysfs_addrm_start(&acxt, parent_sd);/*寻找父sysfs_dirent对应的inode*/
rc = sysfs_add_one(&acxt, sd); /*检查父sysfs_dirent下是否已有有该sysfs_dirent,没有则添加到父sysfs_dirent中*/
sysfs_addrm_finish(&acxt); /*收尾工作*/
if (rc == 0) /*rc为0表示创建成功*/
*p_sd = sd;
else
sysfs_put(sd); /*增加引用计数*/
return rc;
}
这里要注意一下mode变量,改变了使用了宏定义SYSFS_DIR,这个就表示要创建的是一个目录。
mode还有几个宏定义可以使用,如下:
#define SYSFS_KOBJ_ATTR 0x0002 #define SYSFS_KOBJ_BIN_ATTR 0x0004 #define SYSFS_KOBJ_LINK 0x0008 #define SYSFS_COPY_NAME (SYSFS_DIR | SYSFS_KOBJ_LINK)
8.3.1 sysfs_new_dirent
在create_dir函数中,首先调用了sysfs_new_dirent来建立一个新的sysfs_dirent结构体。
下列代码位于fs/sysfs/dir.c。
struct sysfs_dirent *sysfs_new_dirent(const char *name, umode_t mode, int type)
{
char *dup_name = NULL;
struct sysfs_dirent *sd;
if (type & SYSFS_COPY_NAME) {
name = dup_name = kstrdup(name, GFP_KERNEL);
if (!name)
return NULL;
}
/*分配sysfs_dirent并清0*/
sd = kmem_cache_zalloc(sysfs_dir_cachep, GFP_KERNEL);
if (!sd)
goto err_out1;
if (sysfs_alloc_ino(&sd->s_ino)) /*分配ID号*/
goto err_out2;
atomic_set(&sd->s_count, 1);
atomic_set(&sd->s_active, 0);
sd->s_name = name;
sd->s_mode = mode;
sd->s_flags = type;
return sd;
err_out2:
kmem_cache_free(sysfs_dir_cachep, sd);
err_out1:
kfree(dup_name);
return NULL;
}
8.3.2 有关sysfs_dirent中的联合体
分配了sysfs_dirent后,设置了该结构中的联合体数据。先来看下联合体中的四个数据结构。
/* type-specific structures for sysfs_dirent->s_* union members */
struct sysfs_elem_dir {
struct kobject *kobj;
/* children list starts here and goes through sd->s_sibling */
struct sysfs_dirent *children;
};
struct sysfs_elem_symlink {
struct sysfs_dirent *target_sd;
};
struct sysfs_elem_attr {
struct attribute *attr;
struct sysfs_open_dirent *open;
};
struct sysfs_elem_bin_attr {
struct bin_attribute *bin_attr;
struct hlist_head buffers;
};
根据sysfs_dirent所代表的类型不同,也就是目录,synlink,属性文件和bin文件,将分别使用该联合体中相应的struct。
在本例中要创建的是目录,自然使用sysfs_elem_dir结构体,然后保存了kobject对象。
在8.4和8.5中我们将分别看到sysfs_elem_attr和sysfs_elem_symlink的使用。
8.3.3 sysfs_addrm_start
在获取了父sysfs_dirent,调用sysfs_addrm_start来获取与之对应的inode。
下列代码位于fs/sysfs/dir.c。
/**
* sysfs_addrm_start - prepare for sysfs_dirent add/remove
* @acxt: pointer to sysfs_addrm_cxt to be used
* @parent_sd: parent sysfs_dirent
*
* This function is called when the caller is about to add or
* remove sysfs_dirent under @parent_sd. This function acquires
* sysfs_mutex, grabs inode for @parent_sd if available and lock
* i_mutex of it. @acxt is used to keep and pass context to
* other addrm functions.
*
* LOCKING:
* Kernel thread context (may sleep). sysfs_mutex is locked on
* return. i_mutex of parent inode is locked on return if
* available.
*/
void sysfs_addrm_start(struct sysfs_addrm_cxt *acxt,
struct sysfs_dirent *parent_sd)
{
struct inode *inode;
memset(acxt, 0, sizeof(*acxt));
acxt->parent_sd = parent_sd;
/* Lookup parent inode. inode initialization is protected by
* sysfs_mutex, so inode existence can be determined by
* looking up inode while holding sysfs_mutex.
*/
mutex_lock(&sysfs_mutex);
/*根据parent_sd来寻找父inode*/
inode = ilookup5(sysfs_sb, parent_sd->s_ino, sysfs_ilookup_test,
parent_sd);
if (inode) {
WARN_ON(inode->i_state & I_NEW);
/* parent inode available */
acxt->parent_inode = inode; /*保存找到的父inode*/
/* sysfs_mutex is below i_mutex in lock hierarchy.
* First, trylock i_mutex. If fails, unlock
* sysfs_mutex and lock them in order.
*/
if (!mutex_trylock(&inode->i_mutex)) {
mutex_unlock(&sysfs_mutex);
mutex_lock(&inode->i_mutex);
mutex_lock(&sysfs_mutex);
}
}
}
/*
* Context structure to be used while adding/removing nodes.
*/
struct sysfs_addrm_cxt {
struct sysfs_dirent *parent_sd;
struct inode *parent_inode;
struct sysfs_dirent *removed;
int cnt;
};
注意形参sysfs_addrm_cxt,该结构作用是临时存放数据。
8.3.4 sysfs_add_one
下列代码位于fs/sysfs/dir.c。
/**
* sysfs_add_one - add sysfs_dirent to parent
* @acxt: addrm context to use
* @sd: sysfs_dirent to be added
*
* Get @acxt->parent_sd and set sd->s_parent to it and increment
* nlink of parent inode if @sd is a directory and link into the
* children list of the parent.
*
* This function should be called between calls to
* sysfs_addrm_start() and sysfs_addrm_finish() and should be
* passed the same @acxt as passed to sysfs_addrm_start().
*
* LOCKING:
* Determined by sysfs_addrm_start().
*
* RETURNS:
* 0 on success, -EEXIST if entry with the given name already
* exists.
*/
int sysfs_add_one(struct sysfs_addrm_cxt *acxt, struct sysfs_dirent *sd)
{
int ret;
ret = __sysfs_add_one(acxt, sd);
if (ret == -EEXIST) {
char *path = kzalloc(PATH_MAX, GFP_KERNEL);
WARN(1, KERN_WARNING
"sysfs: cannot create duplicate filename '%s'\n",
(path == NULL) ? sd->s_name :
strcat(strcat(sysfs_pathname(acxt->parent_sd, path), "/"),
sd->s_name));
kfree(path);
}
return ret;
}
/**
* __sysfs_add_one - add sysfs_dirent to parent without warning
* @acxt: addrm context to use
* @sd: sysfs_dirent to be added
*
* Get @acxt->parent_sd and set sd->s_parent to it and increment
* nlink of parent inode if @sd is a directory and link into the
* children list of the parent.
*
* This function should be called between calls to
* sysfs_addrm_start() and sysfs_addrm_finish() and should be
* passed the same @acxt as passed to sysfs_addrm_start().
*
* LOCKING:
* Determined by sysfs_addrm_start().
*
* RETURNS:
* 0 on success, -EEXIST if entry with the given name already
* exists.
*/
int __sysfs_add_one(struct sysfs_addrm_cxt *acxt, struct sysfs_dirent *sd)
{
/*查找该parent_sd下有无将要建立的sd,没有返回NULL*/
if (sysfs_find_dirent(acxt->parent_sd, sd->s_name))
return -EEXIST;
sd->s_parent = sysfs_get(acxt->parent_sd); /*设置父sysfs_dirent,增加父sysfs_dirent的引用计数*/
if (sysfs_type(sd) == SYSFS_DIR && acxt->parent_inode) /*如果要创建的是目录或文件,并且有父inode*/
inc_nlink(acxt->parent_inode); /*inode->i_nlink加1*/
acxt->cnt++;
sysfs_link_sibling(sd);
return 0;
}
/**
* sysfs_find_dirent - find sysfs_dirent with the given name
* @parent_sd: sysfs_dirent to search under
* @name: name to look for
*
* Look for sysfs_dirent with name @name under @parent_sd.
*
* LOCKING:
* mutex_lock(sysfs_mutex)
*
* RETURNS:
* Pointer to sysfs_dirent if found, NULL if not.
*/
struct sysfs_dirent *sysfs_find_dirent(struct sysfs_dirent *parent_sd,
const unsigned char *name)
{
struct sysfs_dirent *sd;
for (sd = parent_sd->s_dir.children; sd; sd = sd->s_sibling)
if (!strcmp(sd->s_name, name))
return sd;
return NULL;
}
/**
* sysfs_link_sibling - link sysfs_dirent into sibling list
* @sd: sysfs_dirent of interest
*
* Link @sd into its sibling list which starts from
* sd->s_parent->s_dir.children.
*
* Locking:
* mutex_lock(sysfs_mutex)
*/
static void sysfs_link_sibling(struct sysfs_dirent *sd)
{
struct sysfs_dirent *parent_sd = sd->s_parent;
struct sysfs_dirent **pos;
BUG_ON(sd->s_sibling);
/* Store directory entries in order by ino. This allows
* readdir to properly restart without having to add a
* cursor into the s_dir.children list.
*/
/*children链表根据s_ino按升序排列,现在将sd插入到正确的儿子链表中*/
for (pos = &parent_sd->s_dir.children; *pos; pos = &(*pos)->s_sibling) {
if (sd->s_ino < (*pos)->s_ino)
break;
}
/*插入链表*/
sd->s_sibling = *pos;
*pos = sd;
}
该函数直接调用了__sysfs_add_one,后者先调用sysfs_find_dirent来查找该parent_sd下有无该的sysfs_dirent,如果没有,则设置创建好的新的sysfs_dirent的s_parent字段。也就是将新的sysfs_dirent添加到父sys_dirent中。接着调用sysfs_link_sibling函数,将新建的sysfs_dirent添加到sd->s_parent->s_dir.children链表中。
8.3.5 sysfs_addrm_finish
下列代码位于fs/sysfs/dir.c。
/**
* sysfs_addrm_finish - finish up sysfs_dirent add/remove
* @acxt: addrm context to finish up
*
* Finish up sysfs_dirent add/remove. Resources acquired by
* sysfs_addrm_start() are released and removed sysfs_dirents are
* cleaned up. Timestamps on the parent inode are updated.
*
* LOCKING:
* All mutexes acquired by sysfs_addrm_start() are released.
*/
void sysfs_addrm_finish(struct sysfs_addrm_cxt *acxt)
{
/* release resources acquired by sysfs_addrm_start() */
mutex_unlock(&sysfs_mutex);
if (acxt->parent_inode) {
struct inode *inode = acxt->parent_inode;
/* if added/removed, update timestamps on the parent */
if (acxt->cnt)
inode->i_ctime = inode->i_mtime = CURRENT_TIME;/*更新父inode的时间*/
mutex_unlock(&inode->i_mutex);
iput(inode);
}
/* kill removed sysfs_dirents */
while (acxt->removed) {
struct sysfs_dirent *sd = acxt->removed;
acxt->removed = sd->s_sibling;
sd->s_sibling = NULL;
sysfs_drop_dentry(sd);
sysfs_deactivate(sd);
unmap_bin_file(sd);
sysfs_put(sd);
}
}
该函数结束了添加sysfs_dirent的工作,这个就不多做说明了。
至此,添加一个目录的工作已经完成了,添加目录的工作其实就是创建了一个新的sysfs_dirent,并把它添加到父sysfs_dirent中。
下面我们看下如何添加属性文件。
8.4 创建属性文件
添加属性文件使用sysfs_create_file函数。
下列函数位于fs/sysfs/file.c。
/**
* sysfs_create_file - create an attribute file for an object.
* @kobj: object we're creating for.
* @attr: attribute descriptor.
*/
int sysfs_create_file(struct kobject * kobj, const struct attribute * attr)
{
BUG_ON(!kobj || !kobj->sd || !attr);
return sysfs_add_file(kobj->sd, attr, SYSFS_KOBJ_ATTR);
}
int sysfs_add_file(struct sysfs_dirent *dir_sd, const struct attribute *attr,
int type)
{
return sysfs_add_file_mode(dir_sd, attr, type, attr->mode);
}
int sysfs_add_file_mode(struct sysfs_dirent *dir_sd,
const struct attribute *attr, int type, mode_t amode)
{
umode_t mode = (amode & S_IALLUGO) | S_IFREG;
struct sysfs_addrm_cxt acxt;
struct sysfs_dirent *sd;
int rc;
/*分配sysfs_dirent并初始化*/
sd = sysfs_new_dirent(attr->name, mode, type);
if (!sd)
return -ENOMEM;
sd->s_attr.attr = (void *)attr;
sysfs_addrm_start(&acxt, dir_sd); /*寻找父sysfs_dirent对应的inode*/
rc = sysfs_add_one(&acxt, sd); /*检查父sysfs_dirent下是否已有有该sysfs_dirent,没有则创建*/
sysfs_addrm_finish(&acxt); /*收尾工作*/
if (rc) /*0表示创建成功*/
sysfs_put(sd);
return rc;
}
sysfs_create_file用参数SYSFS_KOBJ_ATTR(表示建立属性文件)来调用了sysfs_add_file,后者又直接调用了sysfs_add_file_mode。
sysfs_add_file_mode函数的执行和8.3节的create_dir函数非常类似,只不过它并没有保存kobject对象,也就是说该sysfs_dirent并没有一个对应的kobject对象。
需要注意的是,这里是建立属性文件,因此使用了联合体中的结构体s_attr。
8.5 创建symlink
最后,来看下symlink的建立。
/**
* sysfs_create_link - create symlink between two objects.
* @kobj: object whose directory we're creating the link in.
* @target: object we're pointing to.
* @name: name of the symlink.
*/
int sysfs_create_link(struct kobject *kobj, struct kobject *target,
const char *name)
{
return sysfs_do_create_link(kobj, target, name, 1);
}
static int sysfs_do_create_link(struct kobject *kobj, struct kobject *target,
const char *name, int warn)
{
struct sysfs_dirent *parent_sd = NULL;
struct sysfs_dirent *target_sd = NULL;
struct sysfs_dirent *sd = NULL;
struct sysfs_addrm_cxt acxt;
int error;
BUG_ON(!name);
if (!kobj) /*kobj为空,表示在sysyfs跟目录下建立symlink*/
parent_sd = &sysfs_root;
else /*有父sysfs_dirent*/
parent_sd = kobj->sd;
error = -EFAULT;
if (!parent_sd)
goto out_put;
/* target->sd can go away beneath us but is protected with
* sysfs_assoc_lock. Fetch target_sd from it.
*/
spin_lock(&sysfs_assoc_lock);
if (target->sd)
target_sd = sysfs_get(target->sd); 、/*获取目标对象的sysfs_dirent*/
spin_unlock(&sysfs_assoc_lock);
error = -ENOENT;
if (!target_sd)
goto out_put;
error = -ENOMEM;
/*分配sysfs_dirent并初始化*/
sd = sysfs_new_dirent(name, S_IFLNK|S_IRWXUGO, SYSFS_KOBJ_LINK);
if (!sd)
goto out_put;
sd->s_symlink.target_sd = target_sd;/*保存目标sysfs_dirent*/
target_sd = NULL; /* reference is now owned by the symlink */
sysfs_addrm_start(&acxt, parent_sd);/*寻找父sysfs_dirent对应的inode*/
if (warn)
error = sysfs_add_one(&acxt, sd);/*检查父sysfs_dirent下是否已有有该sysfs_dirent,没有则创建*/
else
error = __sysfs_add_one(&acxt, sd);
sysfs_addrm_finish(&acxt); /*收尾工作*/
if (error)
goto out_put;
return 0;
out_put:
sysfs_put(target_sd);
sysfs_put(sd);
return error;
}
这个函数的执行也和8.3节的create_dir函数非常类似。其次,symlink同样没有对应的kobject对象。
因为sysfs_dirent表示的是symlink,这里使用了联合体中的s_symlink。同时设置了s_symlink.target_sd指向的目标sysfs_dirent为参数targed_sd。
8.6 小结
本节首先对syfs这一特殊的文件系统的注册过程进行了分析。接着对目录,属性文件和symlink的建立进行了分析。这三者的建立过程基本一致,但是目录
有kobject对象,而剩余两个没有。其次,这三者的每个sysfs_dirent中,都使用了自己的联合体数据。
9 总结
本文首先对sysfs的核心数据kobject,kset等数据结构做出了分析,正是通过它们才能向用户空间呈现出设备驱动模型。
接着,以/sys/bus目录的建立为例,来说明如何通过kobject和kset来建立该bus目录。
随后,介绍了驱动模型中表示总线,设备和驱动的三个数据结构。
然后,介绍了platform总线(bus/platform)的注册,再介绍了虚拟的platform设备(devices/platform)的添加过程。
之后 ,以spi主控制器的platform设备为例,介绍了该platform设备和相应的驱动的注册过程。
最后,介绍了底层sysfs文件系统的注册过程和如何建立目录,属性文件和symlink的过程。
更新说明:
2012.09.14 在6.2.9中,添加分析 bus_for_each_drv。