图像频域变换及应用
图像频域变换及应用
1.名词解释:
(1)空间域:英文:spatial domain。释文:又称图像空间(imagespace)。由图像像元组成的空间。在图像空间中以长度(距离)为自变量直接对像元值进行处理称为空间域处理。
(2)频率域:英文:spatial frequency domain。释文:以空间频率(即波数)为自变量描述图像的特征,可以将一幅图像像元值在空间上的变化分解为具有不同振幅、空间频率和相位的简振函数的线性叠加,图像中各种空间频率成分的组成和分布称为空间频谱。这种对图像的空间频率特征进行分解、处理和分析称为空间频率域处理或波数域处理。
(3)二者关系:
空间域与频率域可互相转换。在空间频率域中可以引用已经很成熟的频率域技术,处理的一般步骤为:
①对图像施行二维离散傅立叶变换或小波变换,将图像由图像空间转换到频域空间。
②在频率域中对图像的频谱作分析处理,以改变图像的频率特征。即设计不同的数字滤波器,对图像的频谱进行滤波。频率域处理主要用于与图像空间频率有关的处理中。如图像恢复、图像重建、辐射变换、边缘增强、图像锐化、图像平滑、噪声压制、频谱分析、纹理分析等处理和分析中。须注意,空间频率(波数)的单位为米 -l或(毫米)-1等。
2.应用:
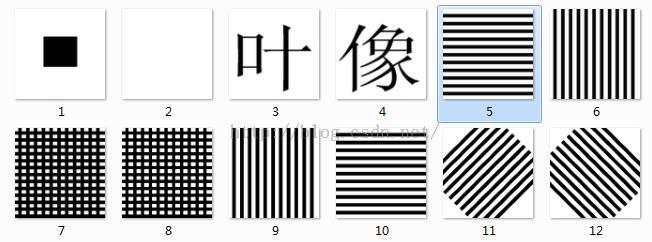
(1)对test 目录下的图像:
查看不同图像的傅立叶变换的图像;
查看不同图像的DCT(离散余弦)变换;
(2)对变换后的图像使用空间域图像增强的方法增强效果;
比较5.bmp和10.bmp、6.bmp和9.bmp频率域图像的不同;
(3)使用低通滤波器,查看结果;
(4)使用高通滤波器,查看结果。
3.常用函数:
(1)频率域处理函数:
① 傅里叶变换fft2();
② 傅里叶逆变换ifft2();
③ 离散余弦变换dct2();
④ 频域滤波函数:dftfilt(f,H)。
查看不同图像的DCT(离散余弦)变换;
(3)使用低通滤波器,查看结果;
(4)使用高通滤波器,查看结果。
3.常用函数:
(1)频率域处理函数:
① 傅里叶变换fft2();
② 傅里叶逆变换ifft2();
③ 离散余弦变换dct2();
④ 频域滤波函数:dftfilt(f,H)。
(2)空间域图像增强
① 线性变换 transfor();
② 指数变换 exp();
③ 对数变换 log();
④ 幂次变换 power();
⑤ 查看直方图 imhist();
⑥ 使用直方图均衡Histeq();
⑦ 使用平滑滤波器(imfilter实现函数滤波);
⑧ 使用锐化滤波器。
(3)傅里叶变换过程:
F = fft2(f)
S = abs(F); 傅里叶谱
Fc = fftshift(F); 象限变换
S2 = log(1+abs(Fc)); 对数变换
Im2uint8(mat2gray(g))
4.matlab源码:
全部文件截图如下:
(1) adjusttoday.m
function adjusttoday(strFileName); I = imread(strFileName); J = imadjust(I,[0.3 0.7],[0.1 0.9],[]); J = uint8(I); imshow(J);
(2) dcttoday.m
function dcttoday(strFileName); RGB = imread(strFileName); I = rgb2gray(RGB); J = dct2(I); figure, imshow(log(abs(J)), []); colormap(jet(64)); colorbar;
(3) dftfilt.m
function g = dftfilt(f, H) %DFTFILT Performs frequency domain filtering. % G = DFTFILT(F, H) filters F in the frequency domain using the % filter transfer function H. The output, G, is the filtered % image, which has the same size as F. DFTFILT automatically pads % F to be the same size as H. Function PADDEDSIZE can be used to % determine an appropriate size for H. % % DFTFILT assumes that F is real and that H is a real, uncentered % circularly-symmetric filter function. % Copyright 2002-2004 R. C. Gonzalez, R. E. Woods, & S. L. Eddins % Digital Image Processing Using MATLAB, Prentice-Hall, 2004 % $Revision: 1.5 $ $Date: 2003/08/25 14:28:22 $ % Obtain the FFT of the padded input. F = fft2(f, size(H, 1), size(H, 2)); % Perform filtering. g = real(ifft2(H.*F)); % Crop to original size. g = g(1:size(f, 1), 1:size(f, 2));
(4) FFTShow.m
function FFTShow(strFilename); I=imread(strFilename); I=rgb2gray(I); figure,imshow(I); str=strcat(strFilename, 'FFT'); F = fft2(I); F2 = log(abs(F)); figure,imshow(F,[-1 5],'notruesize'),Title(str); colormap(jet); colorbar D=dct2(I); D2 = log(abs(D)); figure,imshow(D2,[-1 5],'notruesize'); %colormap(jet); colorbar(5) ffttoday.m
function ffttoday(strFileName); I = imread(strFileName); F = fft2(I); S = abs(F); Fc = fftshift(F); S2 = log(1+abs(Fc)); outcome = Im2uint8(mat2gray(S2)); subplot(221); imshow(I); subplot(222); imshow(F); subplot(223); imshow(S); subplot(224); imshow(Fc); figure, imshow(S2); figure, imshow(outcome);
(6) Freq.m
function FFTShow(strFilename); I=imread(strFilename); % I=rgb2gray(I); figure,imshow(I); F = fft2(I); F2 = log(abs(F)); figure,imshow(F2,[-1 5],'notruesize'),Title(strFilename+ 'FFT');% colormap(jet); colorbar D=dct2(I); % D2 = log(abs(D)); figure,imshow(D,[-1 5],'notruesize'); % colormap(jet); colorbar(7) hpfilter.m
function H = hpfilter(type, M, N, D0, n) %HPFILTER Computes frequency domain highpass filters. % H = HPFILTER(TYPE, M, N, D0, n) creates the transfer function of % a highpass filter, H, of the specified TYPE and size (M-by-N). % Valid values for TYPE, D0, and n are: % % 'ideal' Ideal highpass filter with cutoff frequency D0. n % need not be supplied. D0 must be positive. % % 'btw' Butterworth highpass filter of order n, and cutoff % D0. The default value for n is 1.0. D0 must be % positive. % % 'gaussian' Gaussian highpass filter with cutoff (standard % deviation) D0. n need not be supplied. D0 must be % positive. % Copyright 2002-2004 R. C. Gonzalez, R. E. Woods, & S. L. Eddins % Digital Image Processing Using MATLAB, Prentice-Hall, 2004 % $Revision: 1.4 $ $Date: 2003/08/25 14:28:22 $ % The transfer function Hhp of a highpass filter is 1 - Hlp, % where Hlp is the transfer function of the corresponding lowpass % filter. Thus, we can use function lpfilter to generate highpass % filters. if nargin == 4 n = 1; % Default value of n. end % Generate highpass filter. Hlp = lpfilter(type, M, N, D0, n); H = 1 - Hlp;(8) lpfilter.m
function H = lpfilter(type, M, N, D0, n)
%LPFILTER Computes frequency domain lowpass filters.
% H = LPFILTER(TYPE, M, N, D0, n) creates the transfer function of
% a lowpass filter, H, of the specified TYPE and size (M-by-N). To
% view the filter as an image or mesh plot, it should be centered
% using H = fftshift(H).
%
% Valid values for TYPE, D0, and n are:
%
% 'ideal' Ideal lowpass filter with cutoff frequency D0. n need
% not be supplied. D0 must be positive.
%
% 'btw' Butterworth lowpass filter of order n, and cutoff
% D0. The default value for n is 1.0. D0 must be
% positive.
%
% 'gaussian' Gaussian lowpass filter with cutoff (standard
% deviation) D0. n need not be supplied. D0 must be
% positive.
% Copyright 2002-2004 R. C. Gonzalez, R. E. Woods, & S. L. Eddins
% Digital Image Processing Using MATLAB, Prentice-Hall, 2004
% $Revision: 1.7 $ $Date: 2003/10/13 00:46:25 $
% Use function dftuv to set up the meshgrid arrays needed for
% computing the required distances.
%[U, V] = dftuv(M, N);
U = M;V= N;
% Compute the distances D(U, V).
D = sqrt(U.^2 + V.^2);
% Begin filter computations.
switch type
case 'ideal'
H = double(D = D0);
case 'btw'
if nargin == 4
n = 1;
end
H = 1./(1 + (D./D0).^(2*n));
case 'gaussian'
H = exp(-(D.^2)./(2*(D0^2)));
otherwise
error('Unknown filter type.')
end
(9) paddedsize.m
function PQ = paddedsize(AB, CD, PARAM)
%PADDEDSIZE Computes padded sizes useful for FFT-based filtering.
% PQ = PADDEDSIZE(AB), where AB is a two-element size vector,
% computes the two-element size vector PQ = 2*AB.
%
% PQ = PADDEDSIZE(AB, 'PWR2') computes the vector PQ such that
% PQ(1) = PQ(2) = 2^nextpow2(2*m), where m is MAX(AB).
%
% PQ = PADDEDSIZE(AB, CD), where AB and CD are two-element size
% vectors, computes the two-element size vector PQ. The elements
% of PQ are the smallest even integers greater than or equal to
% AB + CD -1.
%
% PQ = PADDEDSIZE(AB, CD, 'PWR2') computes the vector PQ such that
% PQ(1) = PQ(2) = 2^nextpow2(2*m), where m is MAX([AB CD]).
if nargin == 1
PQ = 2*AB;
elseif nargin == 2 & ~ischar(CD)
PQ = AB + CD - 1;
PQ = 2 * ceil(PQ / 2);
elseif nargin == 2
m = max(AB); % Maximum dimension.
% Find power-of-2 at least twice m.
P = 2^nextpow2(2*m);
PQ = [P, P];
elseif nargin == 3
m = max([AB CD]); %Maximum dimension.
P = 2^nextpow2(2*m);
PQ = [P, P];
else
error('Wrong number of inputs.')
end
(10) 测试用的图片:test