OpenCV3中的SURF特征点的寻找和匹配
不多说什么了,直接上代码吧:
#include <iostream>
#include <stdio.h>
#include "opencv2/core.hpp"
#include "opencv2/core/utility.hpp"
#include "opencv2/core/ocl.hpp"
#include "opencv2/imgcodecs.hpp"
#include "opencv2/highgui.hpp"
#include "opencv2/features2d.hpp"
#include "opencv2/calib3d.hpp"
#include "opencv2/imgproc.hpp"
#include"opencv2/flann.hpp"
#include"opencv2/xfeatures2d.hpp"
#include"opencv2/ml.hpp"
using namespace cv;
using namespace std;
using namespace cv::xfeatures2d;
using namespace cv::ml;
int main()
{
Mat a = imread("box.png", IMREAD_GRAYSCALE); //读取灰度图像
Mat b = imread("box_in_scene.png", IMREAD_GRAYSCALE);
Ptr<SURF> surf; //创建方式和2中的不一样
surf = SURF::create(800);
BFMatcher matcher;
Mat c, d;
vector<KeyPoint>key1, key2;
vector<DMatch> matches;
surf->detectAndCompute(a, Mat(), key1, c);
surf->detectAndCompute(b, Mat(), key2, d);
matcher.match(c, d, matches); //匹配
sort(matches.begin(), matches.end()); //筛选匹配点
vector< DMatch > good_matches;
int ptsPairs = std::min(50, (int)(matches.size() * 0.15));
cout << ptsPairs << endl;
for (int i = 0; i < ptsPairs; i++)
{
good_matches.push_back(matches[i]);
}
Mat outimg;
drawMatches(a, key1, b, key2, good_matches, outimg, Scalar::all(-1), Scalar::all(-1),vector<char>(), DrawMatchesFlags::NOT_DRAW_SINGLE_POINTS); //绘制匹配点
std::vector<Point2f> obj;
std::vector<Point2f> scene;
for (size_t i = 0; i < good_matches.size(); i++)
{
obj.push_back(key1[good_matches[i].queryIdx].pt);
scene.push_back(key2[good_matches[i].trainIdx].pt);
}
std::vector<Point2f> obj_corners(4);
obj_corners[0] = Point(0, 0);
obj_corners[1] = Point(a.cols, 0);
obj_corners[2] = Point(a.cols, a.rows);
obj_corners[3] = Point(0, a.rows);
std::vector<Point2f> scene_corners(4);
Mat H = findHomography(obj, scene, RANSAC); //寻找匹配的图像
perspectiveTransform(obj_corners, scene_corners, H);
line(outimg,scene_corners[0] + Point2f((float)a.cols, 0), scene_corners[1] + Point2f((float)a.cols, 0),Scalar(0, 255, 0), 2, LINE_AA); //绘制
line(outimg,scene_corners[1] + Point2f((float)a.cols, 0), scene_corners[2] + Point2f((float)a.cols, 0),Scalar(0, 255, 0), 2, LINE_AA);
line(outimg,scene_corners[2] + Point2f((float)a.cols, 0), scene_corners[3] + Point2f((float)a.cols, 0),Scalar(0, 255, 0), 2, LINE_AA);
line(outimg,scene_corners[3] + Point2f((float)a.cols, 0), scene_corners[0] + Point2f((float)a.cols, 0),Scalar(0, 255, 0), 2, LINE_AA);
imshow("aaaa",outimg);
cvWaitKey(0);
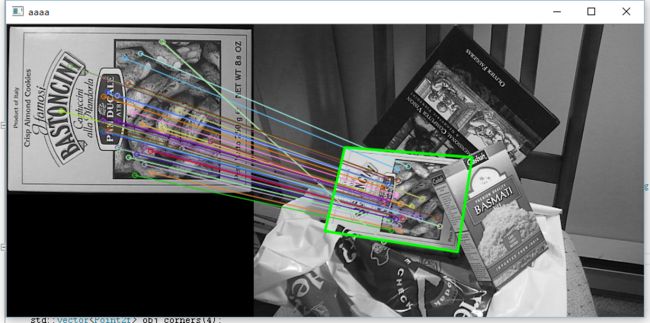
}运行图: