计算机视觉与模式识别(1)—— A4纸边缘提取
最近跟着老师学习了计算机视觉领域中,一个教科书般的知识点 —— 图形的边缘提取。随后自己写了一个A4纸边缘提取的小程序(200行),觉得蛮有意思的,测试的效果也不错,于是心血来潮,打算把自己整个设计的感想写下来。代码可能不是很规范,因为精力都侧重在理论知识上了,本章的全部难点几乎都在图形处理的理论知识+_+!
那么首先说说这次的目标是什么:
输入:普通的A4打印纸,上面可能有手写或打印字体,而且拍照时角度不正。

输出:
1. 图像的边缘
2. 计算A4纸边缘的各直线方程
3. 提取A4纸的4个角点
我的环境:
Windows10、C++11、Visual Studio2013
有很多图形处理的相关库文件,这里我使用了老师推荐的CImg库,可以在官网下载:http://www.cimg.eu/,库的使用十分简单,只需将解压文件中的CImg.h头文件加入工程中即可。更多的有关库的使用这里不过多描述,在后面代码讲解中,我会对关键的函数进行解释。事实上,CImg作为专业的图形库,自身已经实现了类似边缘提取的函数,不过我们这里不会使用,因为这样不就没有意义了吗╮(╯▽╰)╭。
话不多说,从输入来看要提取出A4纸的边缘绝非易事。从我们最直观的感觉来看,首先我们要区分颜色,然后把白色的那块圈起来就得到我们的边缘了。说实话,我一开始也是这么想的,典型的小白思想。注意上面的第一张图,A4纸中会有手写体,所以并不是全白的,而且由于拍照时的光线原因,纸上还有阴影。除此以外,图像中还存在其他物体,比如桌子、地板、腿等。第二张图中还被另一张A4纸抢镜,我们不能把它也算进来。
卧cao( ‵o′),那还怎么做!
莫慌!但不用抱紧我。现在把我的姿势告诉你:
1. 把彩色图像灰度化。
2. 高斯模糊一下。
3. 计算灰度图的梯度。
4. 把梯度高的坐标映射到Hough图坐标上。(Hough转换,一种Voting算法,关键!)
5. 提取Hough图峰值
6. 计算直线方程和角点
经过这一系列的处理,我们就可以得到这样的结果:

效果还不错吧,没有出现上述任何一项问题,A4纸4条边缘和角点的位置也十分贴近真实情况。
我们一步步来。
一、彩色图像灰度化处理。
首先读入BMP格式的原图片:
#include "CImg.h"
using namespace cimg_library;
#define FILE "A4.bmp"
int main() {
CImg<double> image(FILE); // 原始图
CImg<double> grayImg(image); // 灰度图
image.display();
} CImg类是CImg.h中的主要图形类,存储了图片的所有数据,包括长宽高,色彩通道和像素值等。它的初始化很简单,可以是文件路径或者是自身对象,也可以通过指定长宽高创建一张默认图片。CImg只是默认支持了BMP格式的图像,如果需要读取JPG等其它格式的图片,要配置GraphicsMagick或者ImageMagick,这里不多讲。
接下来是遍历image的所有像素,将它们变为灰度值。灰度值的计算公式:
Gray = (R * 299 + G * 587 + B * 114 + 500) / 1000;
// Gray scale;
cimg_forXY(grayImg, x, y) {
double R = grayImg(x, y, 0, 0);
double G = grayImg(x, y, 0, 1);
double B = grayImg(x, y, 0, 2);
double Gray = (R * 299 + G * 587 + B * 114 + 500) / 1000;
grayImg(x, y, 0, 0) = Gray;
grayImg(x, y, 0, 1) = Gray;
grayImg(x, y, 0, 2) = Gray;
}
grayImg.display(); cimg_forXY函数等价于:
for (int y = 0; y < grayImg.height(); ++y) {
for (int x = 0; x < grayImg.width(); ++x) {
// do something
}
} 由于每个坐标的像素有RGB三个色彩通道,所以需要将所有通道设置成灰度值。
完成这部分代码,运行后应有如下结果:
二、高斯模糊。
注意到灰度图中有很多噪声点,这不利于待会儿的梯度计算。梯度计算的目的就是把色差较大的像素找出来,通过这种方法找出边缘(注意我没说A4纸的边缘),我们不希望把噪声点也当做边缘。CImg里面有自带的模糊函数,我只需要调用一下就好了,定义一个BLUR宏变量,方便日后修改。
#define BLUR 2
grayImg.blur(BLUR);
三、计算灰度图的梯度。
接下来就涉及专业的理论知识了,如何计算一个像素点的梯度呢?我要介绍一下Prewitt算子。Prewitt算子是一个3*3的矩阵,它长这样:
横向模板  纵向模板:
纵向模板:
3*3矩阵的位置描述:9个位置依次是Ipp、Icp、Inp、Ipc、Icc、Inc、Ipn、Icn、Inn。
(p表示previous,c表示current,n表示next,Ipp = img(x-1,y-1),Icn=img(x,y+1),...)
计算一个点的梯度首先要找出它的邻域矩阵,此时被计算的点位于邻域矩阵的中心,如果是3*3邻域矩阵,则被计算的点位于Icc位置,其它8个点是被计算点的相邻点。通过Prewitt算子,我们可以计算出点的横向平均梯度是(Inc - Ipc),纵向平均梯度是(Icp - Icn)。
梯度的值 = sqrt ( (Inc-Ipc)^2 + (Icp-Icn)^2 )
#define GRADLIMIT 20
CImg<double> gradnum(image.width(), image.height(), 1, 1, 0);
// 定义3*3领域矩阵I
CImg_3x3(I, double);
// 遍历计算梯度值
cimg_for3x3(grayImg, x, y, 0, 0, I, double) {
const double ix = Inc - Ipc;
const double iy = Icp - Icn;
double grad = std::sqrt(ix*ix + iy*iy);
// 梯度大于阈值才赋值
if (grad > GRADLIMIT) {
gradnum(x, y) = grad;
}
}
gradnum.display(); CImg_3x3是CImg提供的定义领域矩阵的函数,第一个参数是邻域矩阵的名字,第二个参数是邻域矩阵的数据类型。通过将邻域矩阵传入cimg_for3x3循环函数,数据就会自动保存在 Ipp~Inn 九个变量中。我们只打算找出梯度值较大的像素点,因此设置了一个阈值GRADLIMIT,声明为宏变量,只有比阈值大的点才能显示在新创建的图片gradnum里。注意gradnum初始化时只有一个色彩通道,这样就只用修改一个通道值。
完成这部分代码,运行后应有如下结果:
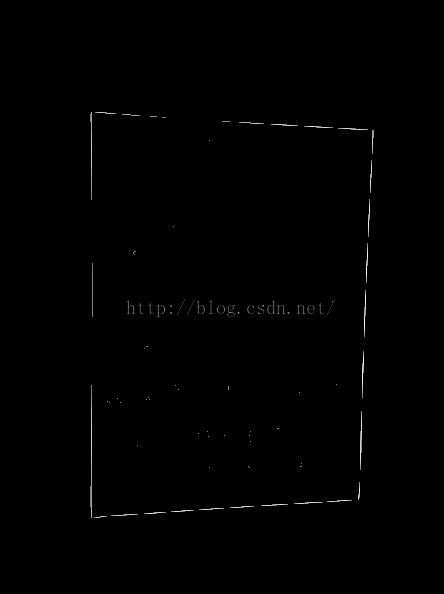
四、梯度图映射到Hough图(Voting算法)
细心的你可能已经发现,经过梯度处理,我们得到的图片已经得到了A4纸的大概边缘,并且消去了很多字体的边缘和其它物体的边缘。但是,仍有一些顽强的噪声点幸存下来了,它们可能是纸上的浓墨重彩,也可能是另一些边缘明显的物体,比如另一张A4纸的一角。因此我们不能利用最小二乘法或者线性回归方法来拟合A4纸的边缘,这些方法受干扰点的影响很大。
伟大的Paul Hough提出了一种解决的办法,称为Hough变换,中文叫霍夫变换。它的主要思路是通过投票的方式,让原始数据点们自己选出一个可以代表他们的函数表达式,因此是一种投票算法。说得这么玄,不如举个例子来说明:
假设我们现在有这么一些数据点:
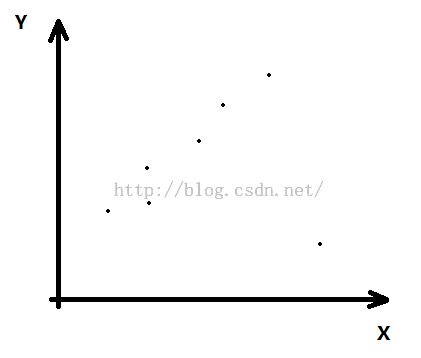
我们知道直线的表达式形式是:y = mx + b。通常我们把x和y看成自变量,把m和b看成是常数。
现在我们做一次变换,把x和y看成常数,把m和b看成变量:b = -xm + y
由于我们已经获得了所有的坐标 (x,y) ,每个坐标(x,y)代进表达式 b = -xm + y 都表示一条关于m和b的直线,因此可以在mb坐标系上画出一簇直线:
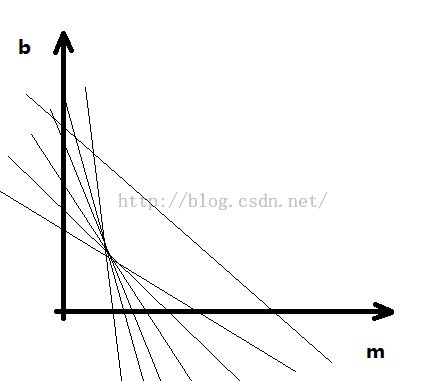

这些直线会近乎相交于一点(注意是近乎不是完全),这一点的坐标(1,1)就是原始点们选举出来的值,这个值能最好地表示原始点的直线表达式,也就是:y = x + 1。
为什么原始图中,右下方的噪声点没有影响到直线表达式呢?我们可以看到,噪声点在mb坐标系上表示的直线偏离了大众交点,它固然也会和其它直线相交,但是那些交点的值(每有一条直线经过就加一),远远比不上大众交点的值,因此被毫不留情地淘汰掉了,这不正体现了投票的精髓吗——少数服从多数。
回到我们的程序,现实是,我们不可能定义一个无限长的m轴和b轴,因此需要把直角坐标系转换为极坐标系。这样就有:p = x*cos(a)+y*sin(a)
极坐标系的好处是,角度a的定义域是 [0, 360] 度,距离p的定义域是 [0, sqrt(x^2+y^2)]。
为了完成hough变换,首先创建一个新的CImg对象hough,用来记录点的值:
int maxDistance = distance(image.width(), image.height()); CImg<double> hough(360, maxDistance, 1, 1, 0);distance的函数定义如下:
// 计算两点间距离
double distance(double x, double y) {
return sqrt(x*x + y*y);
} 修改计算梯度的代码,因为我们只对梯度值大于阈值的像素点感兴趣。找出该点后在hough图上对经过 p = x*cos(a)+y*sin(a) 的点值加1:
// 定义3*3领域矩阵I
CImg_3x3(I, double);
// 遍历计算梯度值
cimg_for3x3(grayImg, x, y, 0, 0, I, double) {
const double ix = Inc - Ipc;
const double iy = Icp - Icn;
double grad = std::sqrt(ix*ix + iy*iy);
// 梯度大于阈值才赋值
if (grad > GRADLIMIT) {
gradnum(x, y) = grad;
cimg_forX(hough, angle) { // 遍历x轴计算y,[x,y]+=1
double rangle = (double)angle*PI / 180.0;
int polar = (int)(x*cos(rangle) + y*sin(rangle));
if (polar >= 0 && polar < hough.height()) { // 确定y在图像高度内
hough(angle, polar) += 1;
}
}
}
} 显示hough图:
hough.display();
完成这部分代码,运行后应有如下结果:(右边是局部放大)


五、提取Hough峰值。
在hough图上,我们可以找到4个亮点,那就是我们希望得到的4条直线。但是每个亮点放大后看,都不是规规矩矩的一个点,而是一簇相邻的亮点,所以要进行提取。Hough峰值的提取有很多种办法,比较理想的是质心算法。我使用了一种较为简单的算法,只是单纯的找出范围内最亮的点,这个范围通过一个阈值DIFF表示:
#define DIFF 200我希望把找到的峰值点信息都保存起来,所以使用了STL的Vector类,并且定义了一个新结构体Dot:
// 2D Dot(x, y) [value]
struct Dot {
int x, y, value;
Dot(int _x, int _y, int _value)
:x(_x), y(_y), value(_value){}
};
另外要注意,我们的峰值所表示的关于x和y的直线方程
并不一定合法,一般是由极坐标转换回直线坐标的正负误差等造成的。因此首先要进行一番筛选,判断直线是否经过我们的图像。我的判断方法是,如果直线与图像任意一条边有交点,则直线是合法的。该方法涉及两个函数CrossX和CrossY,分别计算直线在指定x或者y上的交点。先看峰值提取代码:
// Find peaks
std::vector<Dot*> peaks;
cimg_forXY(hough, angle, polar) {
if (hough(angle, polar) > THRESHOLD) { // 是否是峰值
bool flag = false;
const int ymin = 0;
const int ymax = image.height() - 1;
const int x0 = CrossY(angle, polar, ymin);
const int x1 = CrossY(angle, polar, ymax);
const int xmin = 0;
const int xmax = image.width() - 1;
const int y0 = CrossX(angle, polar, xmin);
const int y1 = CrossX(angle, polar, xmax);
if (x0 >= 0 && x0 <= xmax || // 表示的直线是否在图像内
x1 >= 0 && x1 <= xmax ||
y0 >= 0 && y0 <= ymax ||
y1 >= 0 && y1 <= ymax) {
for (int i = 0; i < peaks.size(); ++i) { // 遍历数组,找相邻峰值
if (distance(peaks[i]->x - angle, peaks[i]->y - polar) < DIFF) { // 存在相邻峰值
flag = true;
if (peaks[i]->value < hough(angle, polar)) { // 如果比相邻峰值还大
peaks[i] = new Dot(angle, polar, hough(angle, polar)); // 替换为当前峰值
}
}
}
if (flag == false) { // 当前峰值无相邻峰值
peaks.push_back(new Dot(angle, polar, hough(angle, polar))); // 加入新峰值
}
}
}
} CrossX和CrossY的定义如下:
// Polar coordinate intersection at x
const int CrossX(int theta, int distance, int x) {
double angle = (double)theta*PI / 180.0;
double m = -cos(angle) / sin(angle);
double b = (double)distance / sin(angle);
return m*x + b;
}
// Polar coordinate intersection at y
const int CrossY(int theta, int distance, int y) {
double angle = (double)theta*PI / 180.0;
double m = -cos(angle) / sin(angle);
double b = (double)distance / sin(angle);
return ((double)(y - b) / m);
} 如果你的阈值设置得当,那么你会得到一个含有4个值的峰值数组。
六、计算直线方程和角点坐标。
有了峰值数组,实际上我们已经得到了A4纸4条边缘的极坐标直线方程,我们要把它们转换成直角坐标方程,并且计算直线的交点:
// Transform polar coordinates to rectangular coordinates
std::vector<Line*> lines;
for (int i = 0; i < peaks.size(); ++i) {
double angle = (double)peaks[i]->x*PI / 180.0;
double m = -cos(angle) / sin(angle);
double b = (double)peaks[i]->y / sin(angle);
lines.push_back(new Line(m, b));
std::cout << "y = (" << m << ") x + (" << b << ")" << std::endl;
}
std::cout << std::endl << "intersections: " << std::endl;
// Calculate line intersections
std::vector<Dot*> intersections;
for (int i = 0; i < lines.size(); ++i) {
for (int j = i + 1; j < lines.size(); ++j) {
double m0 = lines[i]->m;
double m1 = lines[j]->m;
double b0 = lines[i]->b;
double b1 = lines[j]->b;
double x = (b1 - b0) / (m0 - m1);
double y = (m0*b1 - m1*b0) / (m0 - m1);
if (x >= 0 && x < result.width() && y >= 0 && y < result.height()) {
intersections.push_back(new Dot(x, y, 0));
std::cout << "(" << x << ", " << y << ")" << std::endl;
}
}
}
其中Line是新定义的结构体:
// 2D Straight Line(x, y) [y = m*x + b]
struct Line {
double m, b;
Line(double _m, double _b)
:m(_m), b(_b){}
}; 完成这部分代码,运行后可以在控制台看到直线方程和角点坐标:
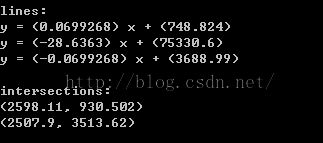
Oops!看来之前只找出了3条直线,不过不要紧,只需改一下阈值就好,后面会详细讲解如何调阈值。
七、绘图。
有了直线方程和角点坐标,我想把他们绘制在原图上,这样可以有直观的感受,知道是否出现了问题。直线和点的绘制可以直接使用CImg的draw_line和draw_circle函数:
CImg<double> result(image);
// Draw lines
for (int i = 0; i < lines.size(); ++i) {
const int ymin = 0;
const int ymax = result.height() - 1;
const int x0 = (double)(ymin - lines[i]->b) / lines[i]->m;
const int x1 = (double)(ymax - lines[i]->b) / lines[i]->m;
const int xmin = 0;
const int xmax = result.width() - 1;
const int y0 = xmin*lines[i]->m + lines[i]->b;
const int y1 = xmax*lines[i]->m + lines[i]->b;
const double color[] = { 255, 0, 255 };
if (abs(lines[i]->m) > SLOPE_FLAG) {
result.draw_line(x0, ymin, x1, ymax, color);
}
else {
result.draw_line(xmin, y0, xmax, y1, color);
}
}
// Draw intersections
for (int i = 0; i < intersections.size(); ++i) {
const double color[] = { 255, 100, 255 };
result.draw_circle(intersections[i]->x, intersections[i]->y, 50, color);
}
result.display();
注意特殊情况,要考虑直线是水平或者垂直情况下的绘制。
完成绘制后,我们终于可以看见结果了:
正如我们第6步结束后看到的,我们只找到了A4纸的3条边缘,左侧的边缘似乎被遗弃掉了。这是由于阈值设置不得当引起的,如果足够细心的话,会发现原图A4纸左侧是有阴影的,因此得到的梯度图中,左侧的点比较少,所以在hough图上亮点就不明显。
目前为止,整个程序的阈值有:
#define BLUR 3 #define GRADLIMIT 20 #define THRESHOLD 800 #define DIFF 200 #define SLOPE_FLAG 1其中SLOPE_FLAG是用来判断直线是否水平的,因此可以不用管它。我们来讨论剩下的4个阈值。
BLUR:模糊参数,通常在原图噪声点较多的时候适当增大。
GRADLIMIT:梯度阈值,如果边缘与周围物体的区分不明显,则应适当减小,反之则适当增大。
THRESHOLD:Hough峰值阈值,这里应通过调整阈值来获取到刚好4个峰值。
DIFF:峰值提取时判断相邻峰值的距离阈值,如果一条边提取后有两个斜率十分相近的直线方程,那么应增大该阈值。
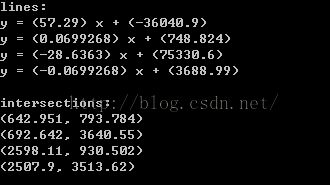
这里,我们应该减小THRESHOLD阈值,从原先的800降到650,这样就能得到正确的结果:
直线的方程和角点坐标显示在命令行窗口:
结果图的左侧边缘似乎并没有完全贴合我们的A4纸,只是由于我的峰值提取算法导致的,如果采用质心算法效果会更好。
Hough的强大之处是,如果我们把A4纸的一角盖住了,我们也能预测出A4纸原来的样子,仔细想想,是不是这样?
好了,今天给出的是满满的干货,要吸收还得多打打代码。我写得太急,代码一点都不优雅,大家千万别学我,最好把各个功能都结构化,方便日后重用。
最后贴出我的完整代码吧:
#include "CImg.h"
using namespace cimg_library;
#include <vector>
#include <iostream>
#define FILE "A4.bmp"
#define BLUR 3
#define GRADLIMIT 20
#define THRESHOLD 650
#define DIFF 200
#define SLOPE_FLAG 1
#define PI 3.14159265358979323846
// 2D Dot(x, y) [value]
struct Dot {
int x, y, value;
Dot(int _x, int _y, int _value)
:x(_x), y(_y), value(_value){}
};
// 2D Straight Line(x, y) [y = m*x + b]
struct Line {
double m, b;
Line(double _m, double _b)
:m(_m), b(_b){}
};
// Calculate the distance
double distance(double x, double y) {
return sqrt(x*x + y*y);
}
// Polar coordinate intersection at x
const int CrossX(int theta, int distance, int x) {
double angle = (double)theta*PI / 180.0;
double m = -cos(angle) / sin(angle);
double b = (double)distance / sin(angle);
return m*x + b;
}
// Polar coordinate intersection at y
const int CrossY(int theta, int distance, int y) {
double angle = (double)theta*PI / 180.0;
double m = -cos(angle) / sin(angle);
double b = (double)distance / sin(angle);
return ((double)(y - b) / m);
}
int main() {
CImg<double> image(FILE);
CImg<double> grayImg(image);
CImg<double> result(image);
// Gray scale;
cimg_forXY(grayImg, x, y) {
double R = grayImg(x, y, 0, 0);
double G = grayImg(x, y, 0, 1);
double B = grayImg(x, y, 0, 2);
double Gray = (R * 299 + G * 587 + B * 114 + 500) / 1000;
grayImg(x, y, 0, 0) = Gray;
grayImg(x, y, 0, 1) = Gray;
grayImg(x, y, 0, 2) = Gray;
}
// Blur
grayImg.blur(BLUR);
CImg<double> gradnum(image.width(), image.height(), 1, 1, 0);
int maxDistance = distance(image.width(), image.height());
CImg<double> hough(360, maxDistance, 1, 1, 0);
// 定义3*3领域矩阵I
CImg_3x3(I, double);
// 遍历计算梯度值
cimg_for3x3(grayImg, x, y, 0, 0, I, double) {
const double ix = Inc - Ipc;
const double iy = Icp - Icn;
double grad = std::sqrt(ix*ix + iy*iy);
// 梯度大于阈值才赋值
if (grad > GRADLIMIT) {
gradnum(x, y) = grad;
cimg_forX(hough, angle) {
double rangle = (double)angle*PI / 180.0;
int polar = (int)(x*cos(rangle) + y*sin(rangle));
if (polar >= 0 && polar < hough.height()) {
hough(angle, polar) += 1;
}
}
}
}
// Find peaks
std::vector<Dot*> peaks;
cimg_forXY(hough, angle, polar) {
if (hough(angle, polar) > THRESHOLD) { // 是否是峰值
bool flag = false;
const int ymin = 0;
const int ymax = image.height() - 1;
const int x0 = CrossY(angle, polar, ymin);
const int x1 = CrossY(angle, polar, ymax);
const int xmin = 0;
const int xmax = image.width() - 1;
const int y0 = CrossX(angle, polar, xmin);
const int y1 = CrossX(angle, polar, xmax);
if (x0 >= 0 && x0 <= xmax || // 表示的直线是否在图像内
x1 >= 0 && x1 <= xmax ||
y0 >= 0 && y0 <= ymax ||
y1 >= 0 && y1 <= ymax) {
for (int i = 0; i < peaks.size(); ++i) { // 遍历数组,找相邻峰值
if (distance(peaks[i]->x - angle, peaks[i]->y - polar) < DIFF) { // 存在相邻峰值
flag = true;
if (peaks[i]->value < hough(angle, polar)) { // 如果比相邻峰值还大
peaks[i] = new Dot(angle, polar, hough(angle, polar)); // 替换为当前峰值
}
}
}
if (flag == false) { // 当前峰值无相邻峰值
peaks.push_back(new Dot(angle, polar, hough(angle, polar))); // 加入新峰值
}
}
}
}
std::cout << "lines: " << std::endl;
// Transform polar coordinates to rectangular coordinates
std::vector<Line*> lines;
for (int i = 0; i < peaks.size(); ++i) {
double angle = (double)peaks[i]->x*PI / 180.0;
double m = -cos(angle) / sin(angle);
double b = (double)peaks[i]->y / sin(angle);
lines.push_back(new Line(m, b));
std::cout << "y = (" << m << ") x + (" << b << ")" << std::endl;
}
std::cout << std::endl << "intersections: " << std::endl;
// Calculate line intersections
std::vector<Dot*> intersections;
for (int i = 0; i < lines.size(); ++i) {
for (int j = i + 1; j < lines.size(); ++j) {
double m0 = lines[i]->m;
double m1 = lines[j]->m;
double b0 = lines[i]->b;
double b1 = lines[j]->b;
double x = (b1 - b0) / (m0 - m1);
double y = (m0*b1 - m1*b0) / (m0 - m1);
if (x >= 0 && x < result.width() && y >= 0 && y < result.height()) {
intersections.push_back(new Dot(x, y, 0));
std::cout << "(" << x << ", " << y << ")" << std::endl;
}
}
}
std::cout << std::endl;
// Draw lines
for (int i = 0; i < lines.size(); ++i) {
const int ymin = 0;
const int ymax = result.height() - 1;
const int x0 = (double)(ymin - lines[i]->b) / lines[i]->m;
const int x1 = (double)(ymax - lines[i]->b) / lines[i]->m;
const int xmin = 0;
const int xmax = result.width() - 1;
const int y0 = xmin*lines[i]->m + lines[i]->b;
const int y1 = xmax*lines[i]->m + lines[i]->b;
const double color[] = { 255, 0, 255 };
if (abs(lines[i]->m) > SLOPE_FLAG) {
result.draw_line(x0, ymin, x1, ymax, color);
}
else {
result.draw_line(xmin, y0, xmax, y1, color);
}
}
// Draw intersections
for (int i = 0; i < intersections.size(); ++i) {
const double color[] = { 255, 100, 255 };
result.draw_circle(intersections[i]->x, intersections[i]->y, 50, color);
}
result.display();
// Display
//grayimg.display();
//gradnum.display();
//hough.display();
result.display();
}