【cocos2D-x学习】17.手势识别
【目标】:在cocos2dx中,识别如左滑、上滑之类的简单手势
【参考】:
《动态规划时间规整简介入门》:http://blog.csdn.net/detective_xin/article/details/7986834
《Mouse gestures recognition》:http://www.codeproject.com/Articles/1591/Mouse-gestures-recognition
《现代优化计算方法》:这个是我硕士时期学的一个课本,清华大学出版,才发现还挺有用。。。
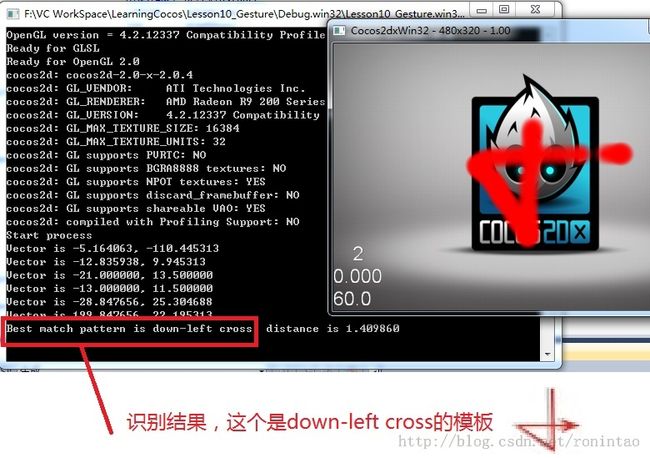
一、期望的效果
二、识别的方法
我现在会的是下面两种:动态时间规整和BP神经网络。另外还有:隐马尔科夫模型HMM,支持向量机SVM。另外,OPENCV中也有手势识别的现成算法,不过我暂时还不会OPENCV。
就动态时间规整和BP神经网络而言。我个人目前感觉动态时间规整更加适合这个场景(但我参考的Konstantin Boukreev的实现方式用的是BP神经网络),BP神经网络的话对输入维数有严格要求,因此对预处理方法要求更加高。而动态时间规整实现起来也很简单,上面示例的程序就是用DTW来实现的,识别率相当的高。当然神经网络的运用场景更广,掌握了当然没有坏处。
下面分别介绍两种算法。
三、DTW:动态时间规整
1、Dynamic Time Warping(DTW)要解决的问题
在识别过程中,最大的麻烦,不是噪声,而是每条边不确定的长度和位置。噪声可以通过平滑的方式,将那些小于一定阈值的边剔除,而轻易排除,但是对于不确定的边长,就很头疼,例如下面的三种图案:

从肉眼上看,这三个图案是非常相似的。但计算机要看出这一点,则很困难。
如果仅仅要使得图1和图2相似,还并不复杂,这两者之间实际上只有边长的区别,我们可以使用角度作为值,来进行比较,这样取值后,
图一:Data_1 = [ 0.0f, 90.0f];
图二:Data_2 = [ 0.0f, 90.0f];
图三:Data_3 = [-10.0f, 10.0f, 90.0f]
但是这个时候计算欧式距离
Distance( A, B ) = ( Data_A [0] - Data_B [0] ) ^ 2 + ( Data_A [1] - Data_B [1] ) ^ 2 + ...... + ( Data_A [n] - Data_B [n] ) ^ 2
会发现图3与图1和图2之间差距巨大,这显然与事实并不相符。
为了解决这个问题,DTW就应运而生了。
2、DTW的基本思路
欧式距离差距大的原因是因为 10 必须和 90 对应,如果 10 和 0 对应,90和90对应,那么距离不就缩小了吗?引用《动态规划时间规整简介入门》里面的话来说,DTW的基本思路,就是一种时间扭曲,感觉就像是音乐中的多拍音符,使得原来的0占两个身位,对应-10和10,从而缩小了他们之间的距离:
Data_2: __0__ 90
Data_3: -10 10 90
3、DTW的基本方法
那么,如果找到这样一种对应关系呢?这基于以下的递归:
对于两个数组 ABCDE 和 UVWX,他们之间的最佳对应关系,应该来源于以下三种方式之一:
1)E 与 X 对应,D 与 W 对应。这意味着,E 和 X都不需要扭曲,那么 Distance( ABCDE, UVWX ) = Distance( ABCD, UVW ) + Distance( E, X )
2)E 与 X 对应,D 与 X 对应。那么,E不需要扭曲,X需要扭曲,那么 Distance( ABCED, UVWX ) = Distance(ABCD, UVWX) + Distance( E, X )
3)E 与 X 对应,E 与 W对应。那么,X不需要扭曲,E需要扭曲,那么 Distance( ABCED, UVWX ) = Distance(ABCDE, UVW) + Distance( E, X )
其实还有两种情况:E 与 X 不对应,以及 E 与 X 都需要扭曲,不过很容易看出,都是不可能的。
所以,数组 ABCDE 和 UVWX 之间最佳对应关系的距离,应该是以上三种方式的最小者。
明眼人很可能会发现,这不明显就是动态规划嘛!没错,不然名字也不会那么接近了。
4、代码
这里的 mData 是经过平滑等预处理的触屏输入,记录的是鼠标滑动形成的边的角度,是normalized后的方向向量。
float GestureProcessor::getDTWDistance(const VecList & pattern, const int maxStride) {
//几个辅助宏
#define GET_INDEX(_n, _m) ( (_m) * MAX_N + (_n) )
#define GET_ELEMENT(_n, _m) ( output[GET_INDEX(_n, _m)] )
#define GET_DISTANT(_p, _d) ( ccpDistance(_p, _d) )
//术语解释:N是data的数据index,M是pattern的数据index
int MAX_N = mData.size();
int MAX_M = pattern.size();
float * output = new float[MAX_N * MAX_M];
memset(output, 0, sizeof(float) * MAX_M * MAX_N);
int n = 0;
int m = 0;
for ( VecItorC nItor = mData.begin(); nItor != mData.end(); nItor ++, n ++, m = 0 ) {
for ( VecItorC mItor = pattern.begin(); mItor != pattern.end(); mItor ++, m ++ ) {
//在 O[n-1][m], O[n][m-1], O[n-1][m-1] 中选最小值
float minValue;
if ( n == 0 && m == 0 )
minValue = 0;
else if ( n == 0 )
minValue = GET_ELEMENT(n, m-1);
else if ( m == 0 )
minValue = GET_ELEMENT(n-1, m);
else
minValue = MIIN( MIIN(GET_ELEMENT(n-1, m), GET_ELEMENT(n, m-1)), GET_ELEMENT(n-1, m-1) );
GET_ELEMENT(n, m) = GET_DISTANT(*nItor, *mItor) + minValue;
}
}
float ans = GET_ELEMENT( MAX_N - 1, MAX_M - 1 );
delete [] output;
return ans;
}
四、BP神经网络
以下省去了偏微分的推导,主要是因为贴公式太麻烦,本身并不复杂,对证明有兴趣的同学请参阅《现代优化计算方法》,我这里只介绍主体部分,在原书基础上对几个重要公式有部分化简和归并。
1、总体思路
BP神经网络的总体思路,就是设定一个权值矩阵,给定样本的输入,通过矩阵计算输出,然后将这个输出与期望的输出对比,将误差分解到矩阵各个分量进行调整。
2、如何正向取值
2.1 先研究单层神经网络:
(1)记输入为 X,输出为 Y。X 、Y 均为矩阵形式,X 有 n 个分量,是一个 n * 1 的矩阵;Y 有 m 个分量,是一个 m * 1 的矩阵
(2)将输入 X 输入网络。这个网络上有 m 个神经元,接受来自于 n 条神经的刺激。记总刺激为 Z:
![]()
【由于博客里面不好写上标,所以用 W^ 表示 W 的转置矩阵,为统一,后面公式中也这样写。】
非常需要注意的一点,是这里的公式中用的是转置矩阵,公式来自于《现代优化计算方法》,我也不知道为什么要这样绕。
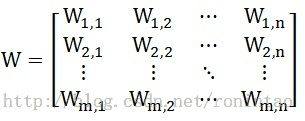
(3)式 2-1 中的 W 被称为权矩阵。W 是一个 m * n 的矩阵,W^ 就是一个 n * m 的矩阵:
(4)式 2-1 中的 θ 称为阈值。是一个 m * 1 的矩阵
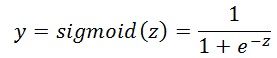
(5)得到 Z 之后,根据激活函数,确定 Y 的值
![]()
2.2 再研究多层神经网络
(1)对多层神经网络,包含隐层 Layer(1) 、 Layer(2) 、 …… 、 Layer(k)
输入层记为第0层 Layer(0),这个第0层实际并不存在,也没有任何神经元节点。
则 X 是整个网络的输入,我们可以把他当做是第0层的输出。整个网络的输出 Y 是 Layer(k) 的输出。记 L_i 的权矩阵为 W(i),则 W(i) 的输入 X(i) 是 Layer(i-1) 的输出,由其产生刺激矩阵,进而产生的输出 Y(i) 再作为下一层的输入,继续传递:
【其中,i = 1, 2, 3... k,表示层数】
(2)将式 2-4 带入 2-3,有
即,第 i 层的输入是 X(i),输出是 X(i+1),整个网络的输入是 X(1),输出是 X(k+1)
(4)若 X(i) 是 m(i) 维的,则 W(i) 是 m(i) * m(i+1) 维的矩阵。
3、如何反向学习
3.1 先讨论 θ(i) = 0 的情况,对不为0的情况可以通过后面的讨论归结到本情况
激活函数设置为
(1)偏差值 B
上面说到第 i 层的输出是 X(i+1),这个是根据神经网络的权矩阵算出来的,会与期望值有一定偏差。记其期望值为 D(i+1),记偏差为
可以看到 B(i) 是一个 m(i+1) * 1 的矩阵。(反复强调行列数的原因,是因为这个在程序里面想起来很麻烦。。。)
(2)根据 B(i+1) 计算 B(i)
显然,我们只对最终的输出值 Y,可以获得一个期望值,对于中间隐层的计算中间值,是没有什么期望值的。所以这里的偏差值不能通过式3-1计算,需要通过反向推算,这就是所谓的Back Propagation。
这里要省略一坨偏微分计算,直接给出最后的计算结果。还是那句话,有兴趣的同学可以参阅《现代优化计算方法》。

其中 diag 是对角矩阵:

【这里和上面的矩阵,都假设数组从 1 开始计数】
(3)式3-2 有几点需要注意:
1)B(i) 可以由 i+1 层的数据完全确定
2)这里有个问题,对于 k 层神经网络,最后一层有:
B(k) = diag( X(k+1) * (1 - X(k+1)) ) * W(k+1) * B(k+1)
X(k+1) 和 B(k+1) 都没问题,但是并没有 W(k+1),所以直接令 W(k+1) 为单位矩阵 I
3)注意比较 [式 3-2] 和 [式 2-5],这里的 W 矩阵是没有转置的
(4)根据 B(i) 调整 W(i)
1)计算梯度矩阵
X(i) 是一个 m(i) * 1 矩阵,B(i) 是一个 m(i+1) * 1 的矩阵,则根据上面的式子(注意转置),可以知道 ▽W(i) 是一个 m(i) * m(i+1) 的矩阵,恰好与 W(i) 相同
2)学习
![]()
【其中 ε 是一个新出现的参数,被称为学习效率,设置的越大,收缩的速度越快,但是也可能会导致不收敛】
3)结合上面两个式子,就可以得到:
![]()
4)最后一个问题:
注意到 [式 3-2] 需要用到 W 矩阵,那么那里面用的是学习前的 W,还是调整后的 W' 呢?答案是:使用的是学习前的 W
(5)总结一下:

3.2 如何将 θ 融入 W 矩阵
总体的思路,类似于OPENGL中的齐次矩阵
(1)对第 i 层,将输入X(i)增加一维 -1 ,也就是要将 θ 前面的 -1 转换为输入: Xex(i) = (X(i)^, -1)^,即:
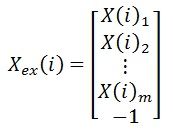
权矩阵变形为 Wex(i) = (W(i)^, θ(i))^,即:
(2)对正向计算的影响:
![]()
和原来的计算基本没有区别。
(3)对反向BP的影响:

也就是说,前两个式子不需要变化,只要改变最后的梯度计算和学习即可。
(4)对上面最后一个式子可以进行分解:

因此,可以得到
3.3 代码
这里给出了BP神经网络的一个简单实现:http://download.csdn.net/detail/ronintao/6754951