数据结构(20)--DAG应用之AOE网的关键路径
参考书籍:数据结构(C语言版)严蔚敏吴伟民编著清华大学出版社
1.关键路径
对整个工程和系统,人们关心的是两个方面的问题:
1)工程能否顺利进行
对AOV网进行拓扑排序
2)估算整个工程完成所必须的最短时间
对AOE网求关键路径
AOE-网(Activity On Edge Network):即边表示活动的网。AOE网是一个带权的有向无环图。其中:顶点表示事件(Event),边表示活动(Activity),权值表示活动持续的时间。通常可用AOE网来估算工程的完成时间。
由于整个工程只有一个开始点和一个完成点,在正常的情况(无环)下,网中只有一个入度为零的点(称作源点)和一个出度为零的点(称作汇点)
依据AOE-网可以研究什么问题?
(1)完成整项工程至少需要多少时间?
(2)哪些活动是影响工程进度的关键?
完成工程的最短时间是从源点到汇点的最长路径的长度。路径长度最长的路径叫做关键路径。
假设开始点是v1,从v1到vi的最长路径长度叫做事件vi的最早发生时间。这个时间决定了所有以vi为尾的弧所表示的活动的最早开始时间。
用e(i)表示活动ai的最早开始时间。
活动的最迟开始时间l(i),这是在不推迟整个工程完成的前提下,活动ai最迟必须开始进行的时间。
l(i)-e(i)两者之差意味着完成活动ai的时间余量。我们把l(i)=e(i)的活动叫做关键活动。
显然,关键路径上的所有活动都是关键活动,因此提前完成非关键活动并不能加快工程的进度。
由此可知:辨别关键活动就是找e(i)=l(i)的活动。为求得AOE网中活动的e(i)和l(i),首先应求得事件的最早发生时间 ve(j)和 最迟发生时间vl(j)。
若活动ai由弧<i,j>表示,持续时间记为dut(<i,j>),则有如下关系:
活动i的最早开始时间等于事件i的最早发生时间:e(i)= ve(i)
活动i的最迟开始时间等于事件j的最迟时间减去活动i的持续时间: l(i)= vl(j) - dut(<i,j>)
求ve(j)和 vl(j)需分两步进行:
ve[j]和vl[j]可以采用下面的递推公式计算:
(1)向汇点递推
ve(源点) = 0 ;
ve(j) = Max{ ve(i) + dut(<i, j>)}
公式意义:从指向顶点Vj的弧的活动中取最晚完成的一个活动的完成时间作为Vj的最早发生时间ve[j]
2) 向源点递推
由上一步的递推,最后总可求出汇点的最早发生时间ve[n]。因汇点就是结束点,最迟发生时间与最早发生时间相同,即vl[n]=ve[n]。从汇点最迟发生时间vl[n]开始,利用下面公式:
vl(汇点) = ve(汇点);
vl(i) = Min{ vl(j) – dut(<i, j>) }
公式意义:由从Vi顶点指出的弧所代表的活动中取最早开始的一个开始时间作为Vi的最迟发生时间。
2.算法描述
由此得到下述求关键路径的算法:
1)输入e条弧<i,j>,建立AOE网的存储结构。
2)从源点v0出发,令ve[0]=0按拓扑有序求其余各顶点的最早发生时ve[i](1≤i≤ n-1)。如果得到的拓扑有序序列中顶点个数小于网中顶点数n,则说明网中存在环,不能求关键路径,算法终止;否则执行步骤(3)。
3)从汇点vn出发,令vl[n-1]= ve[n-1],按逆拓扑有序求其余各顶点的最迟发生时间vl[i] (n-2 ≥i≥ 0);
4)根据各顶点的ve和vl值,求每条弧s的最早开始时间e(s)和最迟开始时间l(s)。若某条弧满足条件e(s)=l(s),则为关键活动。
如上所述,计算顶点的ve值是在拓扑排序的过程中进行的,需对拓扑排序的算法作如下修改:
1)在拓扑排序之前设初值,令ve(i)=0(0<=i<n-1);
2)在算法中增加一个计算vi的直接后继vj的最早发生时间的操作:若 ve(i)+dut(<i,j>) > ve(j), 则 ve(j) = ve(i)+dut(<i,j>);
3)为了能按逆拓扑有序序列的顺序计算各顶点的vl值,需记下在拓扑排序的过程中求得的拓扑有序序列,则需要在拓扑排序算法中,增设一个栈以记录拓扑有序序列,则在计算求得各顶点的 ve 值之后,从栈顶至栈底便为逆拓扑有序序列。
示例:求下图AOE网的关键路径
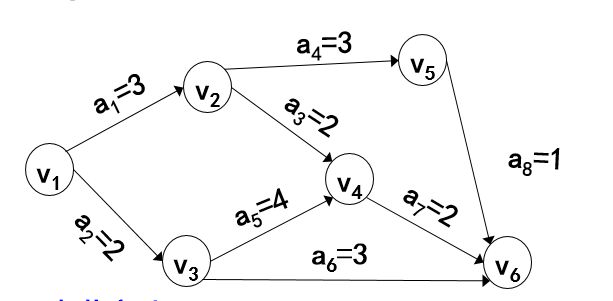
AOE网中顶点事件和活动的发生时间:

总结:总之,关键路径的求解操作包括:
1)计算 ve[j] 和 vl[j]
① 向汇点递推
ve(源点) = 0 ;
ve(j) = Max { ve(i)+ dut(<i, j>)}
② 向源点递推
vl(汇点) = ve(汇点);
vl(i) = Min { vl(j) – dut(<i, j>)}
2)判断 l(i) = e(i)的活动(关键活动)
3.代码实现
3.1定义
/*DAG 有向无环图的应用--关键路径:能否顺利完成工程,即检查是否存在环(拓扑排序),如果无环,则求解整个工程完成所必须的最短时间
AOE网:边表示活动的网,是一个带权的DAG
关键路径即路径长度最长的路径
即完成工程的最短时间是从开始点到完成点的最长路径的长度(这里所说的路径长度是指各活动持续时间之和,不是路径上弧的数目)
关键活动:关键路径上的所有活动,特点:最早开始时间=最迟开始时间
*/
//本示例依然以邻接表作为有向图的存储结构
/*
DAG 有向无环图的应用--拓扑排序:能否顺利完成工程,即检查是否存在环,
AOV网:顶点表示活动的网
除了拓扑排序检查环以外,还可以用DFS
当有向图中无环时,从图中某点进行深度优先遍历时,最先退出DFS函数的顶点即出度为0的顶点,是拓扑序列中的最后一个顶点,由此,按退出DFS函数的先后记录下来的顶点序列,即为逆向的拓扑有序序列
*/
//本次示例采用邻接表作为有向图的存储结构
#include<stdio.h>
#include<stdlib.h>
/*
图的表示方法
DG(有向图)或者DN(有向网):邻接矩阵、邻接表(逆邻接表--为求入度)、十字链表
UDG(无向图)或者UDN(无向网):邻接矩阵、邻接表、邻接多重表
*/
#define MAX_VERTEX_NUM 10//最大顶点数目
#define NULL 0
typedef int VRType;//对于带权图或网,则为相应权值
typedef int VertexType;//顶点类型
//typedef enum GraphKind {DG, DN, UDG, UDN}; //有向图:0,有向网:1,无向图:2,无向
typedef struct ArcNode{
int adjvex;//该弧所指向的顶点的在图中位置
VRType w;//弧的相应权值
struct ArcNode *nextarc;//指向下一条弧的指针
}ArcNode;//弧结点信息
typedef struct VNode{
VertexType data;//顶点信息
ArcNode *firstarc;//指向第一条依附该顶点的弧的指针
}VNode, AdjVexList[MAX_VERTEX_NUM];//顶点结点信息
typedef struct{
AdjVexList vexs;//顶点向量
int vexnum, arcnum;//图的当前顶点数和弧数
//GraphKind kind;//图的种类标志
}ALGraph;//邻接表表示的图
#define OK 1
#define ERROR 0
typedef int status;
int indegree[MAX_VERTEX_NUM] = {0};//存放各个顶点的入度的数组
int ve[MAX_VERTEX_NUM];//事件的最早发生时间
int vl[MAX_VERTEX_NUM];//事件的最迟发生时间
typedef struct{
int s[MAX_VERTEX_NUM];
int top;
}stack;
3.2邻接表表示有向网
//若图G中存在顶点v,则返回v在图中的位置信息,否则返回其他信息
int locateVex(ALGraph G, VertexType v){
for(int i = 0; i < G.vexnum; i++){
if(G.vexs[i].data == v)
return i;
}
return -1;//图中没有该顶点
}
//采用邻接表表示法构造有向图G
void createDG(ALGraph &G){
printf("输入顶点数和弧数如:(5,3):");
scanf("%d,%d", &G.vexnum, &G.arcnum);
//构造顶点向量,并初始化
printf("输入%d个顶点(以空格隔开如:v1 v2 v3):", G.vexnum);
getchar();//吃掉换行符
for(int m = 0; m < G.vexnum; m++){
scanf("v%d", &G.vexs[m].data);
G.vexs[m].firstarc = NULL;//初始化为空指针////////////////重要!!!
getchar();//吃掉空格符
}
//构造邻接表
VertexType v1, v2;//分别是一条弧的弧尾和弧头(起点和终点)
VRType w;//对于无权图或网,用0或1表示相邻否;对于带权图或网,则为相应权值
printf("\n每行输入一条弧依附的顶点(先弧尾后弧头)和权值(如:v1 v2 3):\n");
fflush(stdin);//清除残余后,后面再读入时不会出错
int i = 0, j = 0;
for(int k = 0; k < G.arcnum; k++){
scanf("v%d v%d %d",&v1, &v2, &w);
fflush(stdin);//清除残余后,后面再读入时不会出错
i = locateVex(G, v1);//弧起点
j = locateVex(G, v2);//弧终点
//采用“头插法”在各个顶点的弧链头部插入弧结点
ArcNode *p1 = (ArcNode *)malloc(sizeof(ArcNode));//构造一个弧结点,作为弧vivj的弧头(终点)
p1->adjvex = j;
p1->w = w;
p1->nextarc = G.vexs[i].firstarc;
G.vexs[i].firstarc = p1;
/*因为是有向图,所以不必创建2个弧结点
ArcNode *p2 = (ArcNode *)malloc(sizeof(ArcNode));//构造一个弧结点,作为弧vivj的弧尾(起点)
p2->adjvex = i;
//p2->w = w;
p2->nextarc = G.vexs[j].firstarc;
G.vexs[j].firstarc = p2;
*/
}
}
3.3关键路径求解算法的实现
改进的拓扑排序:
void findInDegree(ALGraph G, int indegree[]){
ArcNode *p;
for(int i = 0; i < G.vexnum; i++){
for(p = G.vexs[i].firstarc; p; p = p->nextarc){
indegree[p->adjvex]++;
}
}
}
//如有向图无回路,则产生G的顶点的一个拓扑序列并存到栈T中并返回OK,否则返回ERROR
//有向网G采用邻接表做存储结构,求解各个顶点事件的最早发生时间ve
status toplogicalOrder(ALGraph G, stack &T){
//先初始化各个顶点的入度
findInDegree(G, indegree);
stack S;//维护一个栈来存放入度为0的顶点,当栈为空时,则说明图中不存在无前驱的顶点了(即没有入度为0的顶点了),说明图中无环
S.top = 0;//否则如果此时仍然存在顶点,而且这些顶点有前驱,则说明有环
//将入度为0的顶点入栈
for(int i = 0; i < G.vexnum; i++){
if(!indegree[i]){
S.s[S.top++] = i;
}
}
//初始化事件的最早发生时间数组ve
for(i = 0; i < G.vexnum; i++){
ve[i] = 0;
}
int count = 0;//对输出的顶点计数
ArcNode *p;
while(S.top != 0){//栈不为空
int topElemVex_i = S.s[--S.top];//栈顶元素出栈,即第一个无前驱的顶点
//printf("v%d ", G.vexs[topElemVex_i].data);//输出当前结点
T.s[T.top++] = topElemVex_i;//入T栈,即为拓扑序列中的一份子
count++;
//去掉以该结点为前驱的点与他的弧,以将相关顶点的入度减1的操作来实现
for(p = G.vexs[topElemVex_i].firstarc; p; p = p->nextarc){
indegree[p->adjvex]--;
if(!indegree[p->adjvex]){
S.s[S.top++] = p->adjvex;//入度为0者入栈
}
//出S栈的栈顶元素是拓扑序列当前访问的结点,按拓扑序列,那么接下来以他为前驱的顶点的最早发生时间可能就会需要更新
//更新顶点vi到v(p->adjvex),v(p->adjvex)的最早发生时间
if(ve[topElemVex_i] + p->w > ve[p->adjvex]){
ve[p->adjvex] = ve[topElemVex_i] + p->w ;
}
}
}
printf("\n");
if(count < G.vexnum)//该有向图有回路
return ERROR;
else
return OK;
}
求解关键活动:
//G为有向网,输出G的各项关键活动
status criticalPath(ALGraph G, stack T){
if(!toplogicalOrder(G, T))
return ERROR;
//初始化事件的最迟开始时间数组vl
for(int i = 0; i < G.vexnum; i++){
vl[i] = ve[G.vexnum-1];//均初始化成汇点的最早发生时间
}
ArcNode *p;
while(T.top != 0){//不为空栈,栈T里存放了拓扑序列,从栈顶到栈底为拓扑逆序
int topElemVex_i = T.s[--T.top];//栈顶元素出栈,按拓扑逆序出栈
//按拓扑逆序求解各顶点的最迟开始时间
for(p = G.vexs[topElemVex_i].firstarc; p ; p = p->nextarc){//p指向的顶点是topElemVex_i顶点的直接后继
if(vl[p->adjvex] - p->w < vl[topElemVex_i]){
vl[topElemVex_i] = vl[p->adjvex] - p->w;
}
}
}
/*
//test
for(i = 0; i < G.vexnum; i++){
printf("%d %d\n", ve[i], vl[i]);
}
*/
printf("\n");
//然后开始求解活动的最早开始时间和最迟开始时间,有几个活动就有几条边,注意我们的存储结构是邻接表
//所以依次访问邻接表中的每个顶点指着的弧链表,就可以访问到所有的弧结点
int ee;//活动的最早发生时间
int el;//活动的最迟发生时间
char tag;//表示是否是关键活动,'*'表示是关键活动
for(i = 0; i < G.vexnum; i++){
for(p = G.vexs[i].firstarc; p ; p = p->nextarc){//P指向每个弧节点
//此时是弧:vi---v(p->adjvex),p指向vi的后继,弧p对应的最早开始时间与最迟开始时间分别为ee,el
ee = ve[i];//ee为活动前一时间的最早开始时间
el = vl[p->adjvex] - p->w;//el= 活动后事件的最迟开始时间-活动持续时间
tag = (ee == el) ? '*' : ' ';
printf("v%dv%d:%d, 活动最早开始时间:%d,活动最晚开始时间:%d,%c\n", G.vexs[i].data, G.vexs[p->adjvex].data, p->w, ee, el, tag);//输出活动的ee与el,标识有*号的代表关键活动
}
}
printf("\n");
return OK;
}
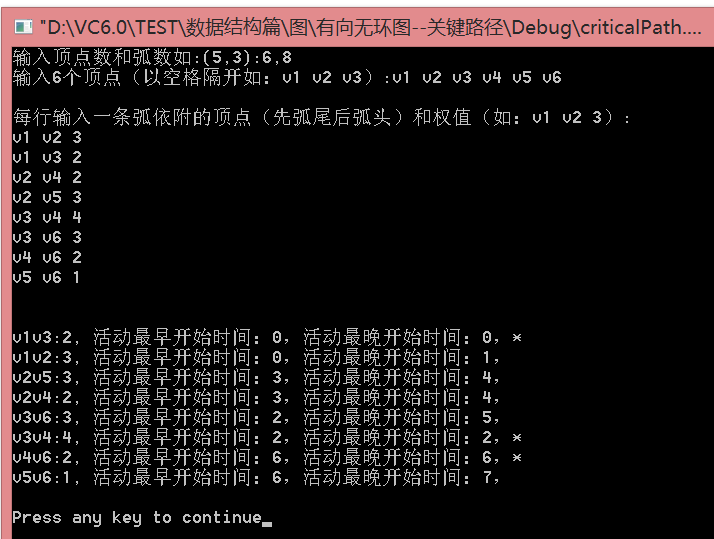
3.4演示
/*测试:
6,8
v1 v2 v3 v4 v5 v6
v1 v2 3
v1 v3 2
v2 v4 2
v2 v5 3
v3 v4 4
v3 v6 3
v4 v6 2
v5 v6 1
*/
void main(){
ALGraph G;
createDG(G);
//printAdjList(G);
stack T;//维护一个栈,用来存储拓扑有序序列
T.top = 0;
//toplogicalOrder(G, T);
/*
printf("该图的拓扑排序序列为:");
for(int i = 0; i < T.top; i++)//从栈底到栈顶是一个拓扑序
printf("v%d ", G.vexs[T.s[i]]);
printf("\n");
*/
criticalPath(G, T);
}
总结:
有向无环图是描述一项工程或系统的进行过程的有效工具。
AOV网(顶点表示活动的有向网)与拓扑排序--解决工程或系统能否顺利进行;
AOE网(边表示活动的有向网)和关键路径问题--估算整个工程完成所必须的最短时间,求解哪些活动为关键活动。
提高关键活动的速度,才有可能加快整个工程的进度,提高非关键活动则是不可能加快整个工程的的。但是关键活动的速度提高是有限度的,只有在不改变网的关键路径的情况下,提高关键活动的速度才有效。另一方面,若网中有几条关键路径,那么单单提高一条关键路径上的关键活动的速度,还不能导致整个工程缩短工期,而必须提高同时在几条关键路径上的活动的速度。