Make a Simple Gripper
本教程将会介绍如何制作一个简单的二栏捏抓手。
Setup your model directory
Make the model
1.生成world文件的目录mkdir ~/simple_gripper_tutorial; cd ~/simple_gripper_tutorial
2.我们将以简单的空world开始。生成world文件。
gedit ~/simple_gripper_tutorial/gripper.world复制如下例如
<?xml version="1.0"?>
<sdf version="1.4">
<world name="default">
<!-- A ground plane -->
<include>
<uri>model://ground_plane</uri>
</include>
<!-- A global light source -->
<include>
<uri>model://sun</uri>
</include>
<include>
<uri>model://my_gripper</uri>
</include>
</world>
</sdf>
3.生成一个模型的目录,来存放模型文件
mkdir -p ~/.gazebo/models/my_gripper
4.让我们来布置的抓手的基本结构。最简单的方法是让一个静态模型添加一个链接。静态模型意味着当模拟器开始时,链接不会移动。这将允许你开始模拟器,在添加关节之前,可视化观测链接位置。
5.生成model.config文件如下:
<?xml version="1.0"?>
<model>
<name>My Gripper</name>
<version>1.0</version>
<sdf version='1.4'>simple_gripper.sdf</sdf>
<author>
<name>My Name</name>
<email>[email protected]</email>
</author>
<description>
My awesome robot.
</description>
</model>
6.将下文复制到 simple_gripper.sdf文件中
<?xml version="1.0"?>
<sdf version="1.4">
<model name="simple_gripper">
<link name="riser">
<pose>-0.15 0.0 0.5 0 0 0</pose>
<inertial>
<pose>0 0 -0.5 0 0 0</pose>
<inertia>
<ixx>0.01</ixx>
<ixy>0</ixy>
<ixz>0</ixz>
<iyy>0.01</iyy>
<iyz>0</iyz>
<izz>0.01</izz>
</inertia>
<mass>10.0</mass>
</inertial>
<collision name="collision">
<geometry>
<box>
<size>0.2 0.2 1.0</size>
</box>
</geometry>
</collision>
<visual name="visual">
<geometry>
<box>
<size>0.2 0.2 1.0</size>
</box>
</geometry>
<material>
<script>Gazebo/Purple</script>
</material>
</visual>
</link>
<link name="palm">
<pose>0.0 0.0 0.05 0 0 0</pose>
<inertial>
<inertia>
<ixx>0.01</ixx>
<ixy>0</ixy>
<ixz>0</ixz>
<iyy>0.01</iyy>
<iyz>0</iyz>
<izz>0.01</izz>
</inertia>
<mass>0.5</mass>
</inertial>
<collision name="collision">
<geometry>
<box>
<size>0.1 0.2 0.1</size>
</box>
</geometry>
</collision>
<visual name="visual">
<geometry>
<box>
<size>0.1 0.2 0.1</size>
</box>
</geometry>
<material>
<script>Gazebo/Red</script>
</material>
</visual>
</link>
<link name="left_finger">
<pose>0.1 0.2 0.05 0 0 -0.78539</pose>
<inertial>
<inertia>
<ixx>0.01</ixx>
<ixy>0</ixy>
<ixz>0</ixz>
<iyy>0.01</iyy>
<iyz>0</iyz>
<izz>0.01</izz>
</inertia>
<mass>0.1</mass>
</inertial>
<collision name="collision">
<geometry>
<box>
<size>0.1 0.3 0.1</size>
</box>
</geometry>
</collision>
<visual name="visual">
<geometry>
<box>
<size>0.1 0.3 0.1</size>
</box>
</geometry>
<material>
<script>Gazebo/Blue</script>
</material>
</visual>
</link>
<link name="left_finger_tip">
<pose>0.336 0.3 0.05 0 0 1.5707</pose>
<inertial>
<inertia>
<ixx>0.01</ixx>
<ixy>0</ixy>
<ixz>0</ixz>
<iyy>0.01</iyy>
<iyz>0</iyz>
<izz>0.01</izz>
</inertia>
<mass>0.1</mass>
</inertial>
<collision name="collision">
<geometry>
<box>
<size>0.1 0.2 0.1</size>
</box>
</geometry>
</collision>
<visual name="visual">
<geometry>
<box>
<size>0.1 0.2 0.1</size>
</box>gedit ~/.gazebo/models/my_gripper/simple_gripper.sdf
</geometry>
<material>
<script>Gazebo/Blue</script>
</material>
</visual>
</link>
<link name="right_finger">
<pose>0.1 -0.2 0.05 0 0 .78539</pose>
<inertial>
<inertia>
<ixx>0.01</ixx>
<ixy>0</ixy>
<ixz>0</ixz>
<iyy>0.01</iyy>
<iyz>0</iyz>
<izz>0.01</izz>
</inertia>
<mass>0.1</mass>
</inertial>
<collision name="collision">
<geometry>
<box>
<size>0.1 0.3 0.1</size>
</box>
</geometry>
</collision>
<visual name="visual">
<geometry>
<box>
<size>0.1 0.3 0.1</size>
</box>
</geometry>
<material>
<script>Gazebo/Green</script>
</material>
</visual>
</link>
<link name="right_finger_tip">
<pose>0.336 -0.3 0.05 0 0 1.5707</pose>
<inertial>
<inertia>
<ixx>0.01</ixx>
<ixy>0</ixy>
<ixz>0</ixz>
<iyy>0.01</iyy>
<iyz>0</iyz>
<izz>0.01</izz>
</inertia>
<mass>0.1</mass>
</inertial>
<collision name="collision">
<geometry>
<box>
<size>0.1 0.2 0.1</size>
</box>
</geometry>
</collision>
<visual name="visual">
<geometry>
<box>
<size>0.1 0.2 0.1</size>
</box>
</geometry>
<material>
<script>Gazebo/Green</script>
</material>
</visual>
</link>
<static>true</static>
</model>
</sdf>
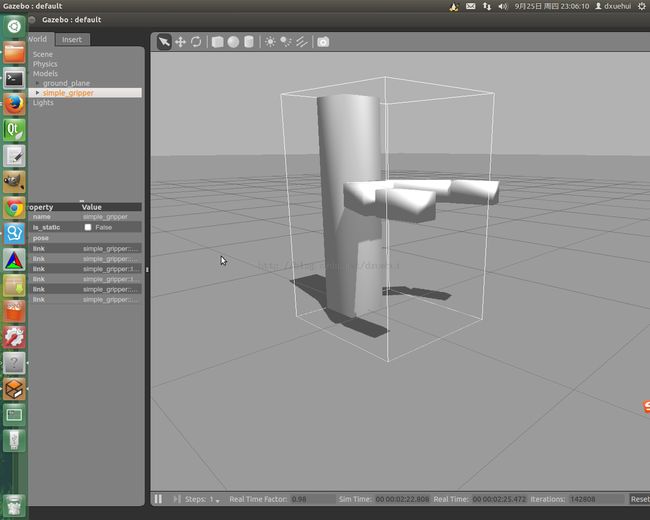
7.运行world文件,来可视化以上文件
gazebo ~/simple_gripper_tutorial/gripper.world
你将看到如上图所示。
1.一旦我们对链接的布局满意,我们可以通过复制以下代码到simple_gripper.sdf中的</model>行前来添加关节。
gedit ~/.gazebo/models/my_gripper/simple_gripper.sdf
<joint name="palm_left_finger" type="revolute">
<pose>0 -0.15 0 0 0 0</pose>
<child>left_finger</child>
<parent>palm</parent>
<axis>
<limit>
<lower>-0.4</lower>
<upper>0.4</upper>
</limit>
<xyz>0 0 1</xyz>
</axis>
</joint>
<joint name="left_finger_tip" type="revolute">
<pose>0 0.1 0 0 0 0</pose>
<child>left_finger_tip</child>
<parent>left_finger</parent>
<axis>
<limit>
<lower>-0.4</lower>
<upper>0.4</upper>
</limit>
<xyz>0 0 1</xyz>
</axis>
</joint>
<joint name="palm_right_finger" type="revolute">
<pose>0 0.15 0 0 0 0</pose>
<child>right_finger</child>
<parent>palm</parent>
<axis>
<limit>
<lower>-0.4</lower>
<upper>0.4</upper>
</limit>
<xyz>0 0 1</xyz>
</axis>
</joint>
<joint name="right_finger_tip" type="revolute">
<pose>0 0.1 0 0 0 0</pose>
<child>right_finger_tip</child>
<parent>right_finger</parent>
<axis>
<limit>
<lower>-0.4</lower>
<upper>0.4</upper>
</limit>
<xyz>0 0 1</xyz>
</axis>
</joint>
<joint name="palm_riser" type="prismatic">
<child>palm</child>
<parent>riser</parent>
<axis>
<limit>
<lower>0</lower>
<upper>0.9</upper>
</limit>
<xyz>0 0 1</xyz>
</axis>
</joint>
并且使其非静止。
...
<static>false</static>
...
2.重启gazebo
gazebo ~/simple_gripper_tutorial/gripper.world
3.右击模型,并且选择view->joints。新生成的关节将会显示:
1.你也可以通过用Joint Control widget来控制每个关节的力点击夹具模型,之后点击用户界面的右侧垂直手柄,拖拽到左边来扩大这个插件。这个插件显示滑动条列表。选择Force tab,并且用滑动条来对每个关节施加力,你将会看到抓手移动。例如,设置palm_riser为10,你将看到如下:

可选:
添加一个小盒子或者圆筒到world,并且用夹具定位。尝试用用户界面的joint control 来夹起对象。
你需要调整合理的惯性对象。