Poj1696计算几何的叉积+极角排序+贪心
说下当时自己的证明(后来有人说这是个所谓极角排序问题,Anyway思路差不多,有点贪心意思,顺带考察了叉积应用),问题可以归结为如果这个虫来到点A,它应该选择的下一个plant的点的原则是?
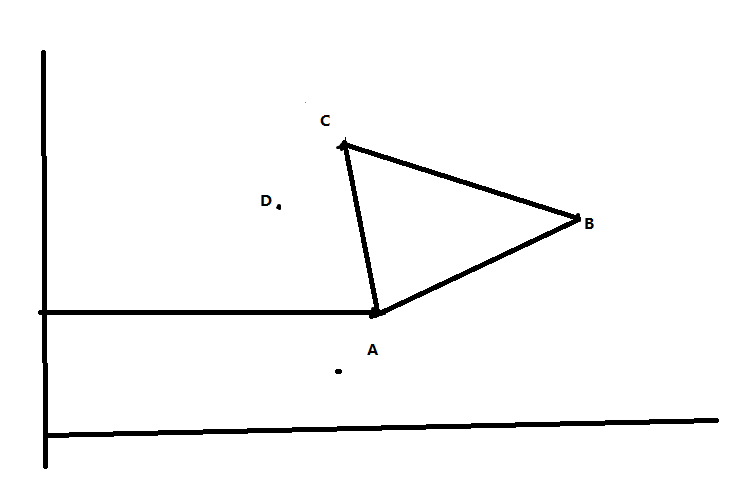
我们可以证明如果点A能够经点B,左转到点C,那么点A就应该选择跳到点B。
证明:
主要证明从点A跳到点B,虫子可以选择的后续点比跳到点C更加多。
(1 ) 如果点A跳到点C,那么点B就无法再到达。但是跳到点B,却可以再跳到点C. 所以从A 到点B的路径至少比从A跳到C的路径多了一个B。
(2) 点A跳到点C,后面所有可能的可以跳到的点,比如点D,从点A跳到点B后,也一样可以到达。证明:点D在边AC的左侧,边AC在AB的左侧,所以点D也在AB的左侧,所以点D可以从B到达。
由此我们可以定义一个 点极角大小关系 B >a C (如果点A能从点B到点C)。 至于如何从程序判断,就一个简单的叉积 BA * CA ,如果大于0,说明边BA左转到边CA,B >a C.
所以问题的算法最终变成了:从规定的第一个y值最小的点A开始,不断找后面对于当前点A的极角最大的点B(就一个排序)。
#include <iostream>
#include<stdio.h>
#include <cmath>
#include <algorithm>
using namespace std;
class Point
{
public:
Point(double tmpx,double tmpy,double tId)
{
x=tmpx;
y=tmpy;
id=tId;
}
Point(double tmpx,double tmpy)
{
x=tmpx;
y=tmpy;
}
Point()
{
x=0.0f;
y=0.0f;
}
double x,y;
int id;
};
//Returen (p2-p1)*(p3-p1)
double CrossProduct(Point point1,Point point2,Point point3)
{
Point vec1=Point(point1.x-point3.x,point1.y-point3.y);
Point vec2=Point(point2.x-point3.x,point2.y-point3.y);
return (vec1.x*vec2.y-vec1.y*vec2.x);
}
double Distance(Point p1,Point p2)
{
//double dis=abs(p1.x-p2.x)+abs(p1.y-p2.y);
double dis=sqrt(pow(p1.x-p2.x,2) + pow(p1.y-p2.y,2) );
return dis;
}
Point currentPoint;
//See if p1 can reach p2 starting from p3, or reverse
//If p1>p2 (p1 can reach p2 through p3), return 1;else return -1;
bool PointReachable(Point point1, Point point2)
{
double d = CrossProduct(point1,point2, currentPoint);
if(d>0)//p1 reach p2,p1 is better
{
return true;
}
else if(d<0)
{
return false;
}
else// p1,p2,p3 are in the same line.
{
double dis1=Distance(point1,currentPoint);
double dis2=Distance(point2,currentPoint);
if(dis1<dis2)
return true;
else
return false;
}
}
int main()
{
int iCases=0;
Point plantPoints[60];
Point sortedPoints[60][60];
scanf("%d",&iCases);
while(iCases>0)
{
int iPoints=0;
scanf("%d",&iPoints);
double minx=(double)(1<<30);
double minY=(double)(1<<30);
int firstIndex=-1;
for(int i=1;i<=iPoints;i++)
{
int tmpi;
scanf("%d",&tmpi);
scanf("%lf%lf",&plantPoints[tmpi].x,&plantPoints[tmpi].y);
plantPoints[tmpi].id=tmpi;
if(plantPoints[tmpi].y<=minY)
{
if(plantPoints[tmpi].y<minY || plantPoints[tmpi].x<minx)
{
minY=plantPoints[tmpi].y;
minx=plantPoints[tmpi].x;
firstIndex=tmpi;
}
}
}
//Swap
Point tmpPoint=plantPoints[1];
plantPoints[1]=plantPoints[firstIndex];
plantPoints[firstIndex]=tmpPoint;
printf("%d %d",iPoints,firstIndex);
currentPoint=plantPoints[1];
//Find plantPoints[i]'s best next point.
for(int i=2;i<iPoints;i++)
{
sort(plantPoints+i,plantPoints+iPoints+1,PointReachable);
currentPoint=plantPoints[i];
printf(" %d",plantPoints[i].id);
}
if(iPoints>1)
printf(" %d",plantPoints[iPoints].id);
printf("\n");
iCases--;
}
return 0;
}