图像处理--角点检测
角点及角点检测
目标描述与识别以及运动估计、目标跟踪等领域,角点提取具有十分重要的意义。在计
算机视觉和图像处理中,对于角点的定义有着不同的表述,其具体定义和描述主要有如
下几种:
①角点是一阶导数的局部最大值所对应的像素点;
②角点是指两条以上的边缘的交点;
③角点指示了物体边缘变化不连续的方向;
④角点处的一阶导数最大,而且高阶导数为零;
⑤角点处不仅梯度的数值大,而且梯度方向的变化率也很大。也就是说,角点指示
了图像在二维空间内灰度变化剧烈的位置,是和周围的邻点有着明显差异的像素点。
第一类定义不能准确地定位角点,当检测到边缘时其一阶导数均局部最大,虽然能
较好的区分边缘和灰度平滑区域,但没有考虑角点处的曲率,故不能区分边缘与角点;
第二类定义不够准确,不易于数学表达,定义太抽象;第三类考虑到了角点处曲率的变
化与边缘处的不同,为更准确的角点定义奠定了基础;第四类定义不够准确,不能很好
的区分角点、边缘、平滑区域,不易于数学描述;第五类定义既考虑了梯度的局部最大
(角点也是边缘点的一部分),又考虑了梯度方向的变化率(只有当梯度方向剧烈变化时才
指示为角点)。
角点检测算法可归纳为3类:基于灰度图像的角点检测、基于二值图像的角点检测、基于轮廓曲线的角点检测。
基于灰度图像的角点检测又可分为基于梯度、基于模板和基于模板梯度组合3类方法,其中基于模板的方法主要考虑像素领域点的灰度变化,即图像亮度的变化,将与邻点亮度对比足够大的点定义为角点。常见的基于模板的角点检测算法有Kitchen-Rosenfeld角点检测算法,Harris角点检测算法、KLT角点检测算法及SUSAN角点检测算法。和其他角点检测算法相比,SUSAN角点检测算法具有算法简单、位置准确、抗噪声能力强等特点。
角点检测算法
1.FAST算法
1.1定义

1.2fast算法实现步骤
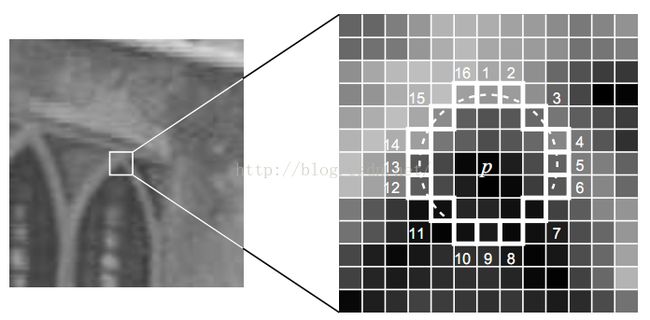
- 从图片中选取一个像素$P$,下面我们将判断它是否是一个特征点。我们首先把它的亮度值设为$I_p$。
- 设定一个合适的阈值$t$。
- 考虑以该像素点为中心的一个半径等于3像素的离散化的Bresenham圆,这个圆的边界上有16个像素(如图1所示)。
- 现在,如果在这个大小为16个像素的圆上有$n$个连续的像素点,它们的像素值要么都比$I_p + t$大,要么都比$I_p - t$小,那么它就是一个角点。(如图1中的白色虚线所示)。$n$的值可以设置为12或者9,实验证明选择9可能会有更好的效果。
上面的算法中,对于图像中的每一个点,我们都要去遍历其邻域圆上的16个点的像素,效率较低。我们下面提出了一种高效的测试(high-speed test)来快速排除一大部分非角点的像素。该方法仅仅检查在位置1,9,5和13四个位置的像素,首先检测位置1和位置9,如果它们都比阈值暗或比阈值亮,再检测位置5和位置13。如果$P$是一个角点,那么上述四个像素点中至少有3个应该必须都大于$I_p+t$或者小于$I_p-t$,因为若是一个角点,超过四分之三圆的部分应该满足判断条件。
如果不满足,那么$p$不可能是一个角点。对于所有点做上面这一部分初步的检测后,符合条件的将成为候选的角点,我们再对候选的角点,做完整的测试,即检测圆上的所有点。
上面的算法效率实际上是很高的,但是有点一些缺点:
- 当$n<12$时不能拒绝许多的候选点;
- 检测出来的角点不是最优的,这是因为它的效率取决于问题的排序与角点的分布;
- 对于角点分析的结果被丢弃了;
- 多个特征点容易挤在一起。
1.3采用非极大值抑制
从邻近的位置选取了多个特征点是另一个问题,我们可以使用Non-Maximal Suppression来解决。
- 为每一个检测到的特征点计算它的响应大小(score function)$V$。这里$V$定义为点$p$和它周围16个像素点的绝对偏差的和。
- 考虑两个相邻的特征点,并比较它们的$V$值。
- $V$值较低的点将会被删除。
1.4fast算法在opencv实现
在OpenCV中进行FAST特征提取的函数为FAST。它一共有4个参数,第一个参数是输入的图像,第二个是返回的特征点,第三个是定义的阈值,第四个决定是否使用非极大值抑制。
void FAST(InputArray image,vector<KeyPoint>& keypoints,int threshold,boolnonmaxSuppression=true ) C++:void FASTX(InputArray image,vector<KeyPoint>& keypoints,int threshold,boolnonmaxSuppression, int type)另外还有一个接口为FASTX,它提供了第五个参数type用来指定FAST检测中像素邻域圆的参数:TYPE_9_16、TYPE_7_12、TYPE_5_8。
#include <opencv2/core/core.hpp>
#include <opencv2/features2d/features2d.hpp>
#include <opencv2/highgui/highgui.hpp>
#include <vector>
using namespace cv;
void main()
{
Mat image;
image = imread("church01.jpg");
// vector of keyPoints
std::vector<KeyPoint> keyPoints;
// construction of the fast feature detector object
FastFeatureDetector fast(40); // 检测的阈值为40
// feature point detection
fast.detect(image,keyPoints);
drawKeypoints(image, keyPoints, image, Scalar::all(255), DrawMatchesFlags::DRAW_OVER_OUTIMG);
imshow("FAST feature", image);
cvWaitKey(0);
}


1.5fast算法总结
FAST算法比其他已知的角点检测算法要快很多倍,但是当图片中的噪点较多时,它的健壮性并不好,而且算法的效果还依赖于一个阈值$t$。
而且FAST不产生多尺度特征而且FAST特征点没有方向信息,这样就会失去旋转不变性。