cvBlob windows7 安装说明
-----------------------------------------cvblob 介绍 -----------------------------------------------
计算机视觉的一个库。用来检测二进制数字图像中的连通区域。
效果如下图:
官网关于编译,安装,如何使用的解释都不够细致。作为小白极其容易失误。
所以我在这里按照我自己的成功过程来介绍。
FAQ里包含四部分问题 -- 介绍, 编译,使用这个库,杂记
http://code.google.com/p/cvblob/wiki/FAQ 但是也是不够细致
总体而言我觉得cvblob就是一个小众的库 但是我用着感觉效果还蛮不错的
--------------------------------------cvblob下载与安装-------------------------------------------
cvblob 官网 http://code.google.com/p/cvblob/
1. 下载库0.10.42. 安装opencv2.4.3
3. 安装cmake 2.8.12
4设置cvblob中文件CMakeLists.txt文件
即E:\cvblob\cvBlob\CMakeLists.txt文件中,在find_package(OpenCV REQUIRED) 这条语句下加入:
set(CMAKE_MODULE_PATH ${PROJECT_SOURCE_DIR}/CMakeScripts) set(OpenCV_DIR E:\OpenCV2.4.3\opencv\build)最终该文件非注释语句内容如下:find_package(OpenCV REQUIRED) set(CMAKE_MODULE_PATH ${PROJECT_SOURCE_DIR}/CMakeScripts) set(OpenCV_DIR E:\OpenCV2.4.3\opencv\build) set(cvBlob_CVBLOB cvblob.cpp cvlabel.cpp cvaux.cpp cvcontour.cpp cvtrack.cpp cvcolor.cpp ) set_source_files_properties(${cvBlob_SRC} PROPERTIES COMPILE_FLAGS "-O3" ) add_library(cvblob SHARED ${cvBlob_CVBLOB}) target_link_libraries(cvblob ${OpenCV_LIBS}) install(FILES cvblob.h DESTINATION include) install(TARGETS cvblob RUNTIME DESTINATION bin LIBRARY DESTINATION lib ARCHIVE DESTINATION lib )
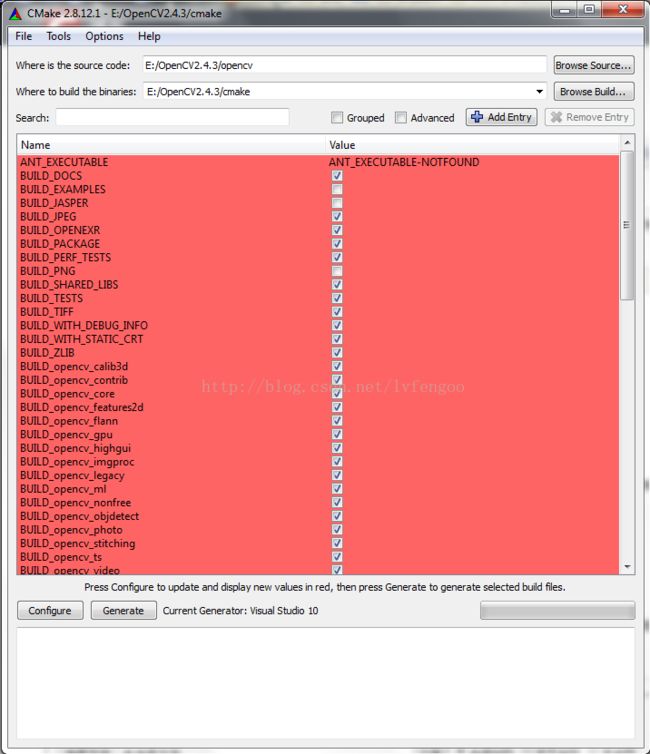
5. 编译 (cmake) opencv2.4.3 源码:
头一次用需要选择编译器 默认用vs2010 就好啦
1.填写:where is the source code和where to build the binaries
2. 点击:configure
3. 点击: Generate
注: 在生成configure和generate的结果过程中,关键是中间没有任何红色的错误显示。如果有错误会以红色来显示,自行处理,有些是因为自己电脑没有配置譬如TBB等等,如果没有就把勾去掉就好啦。
以下截图是我都已经弄好所有的配置之后的截图:
1.config前:
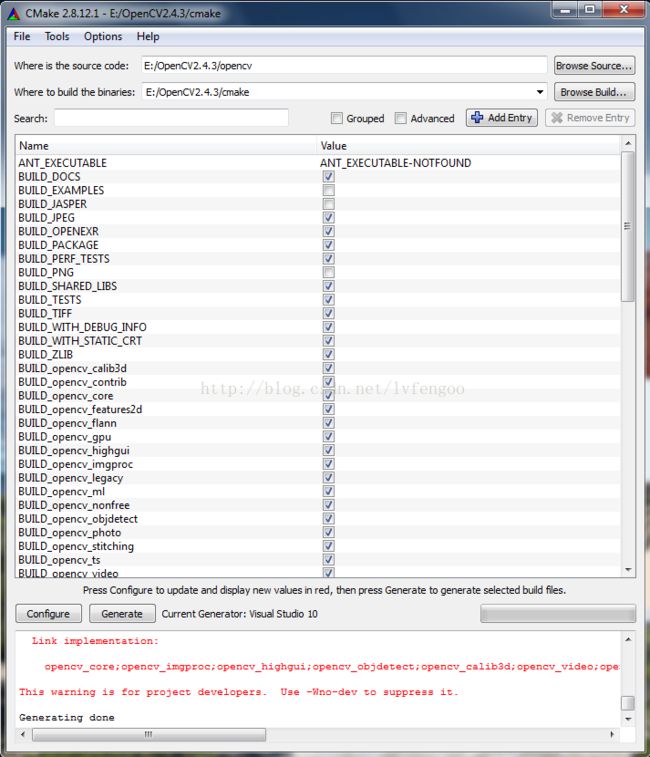
configure done:
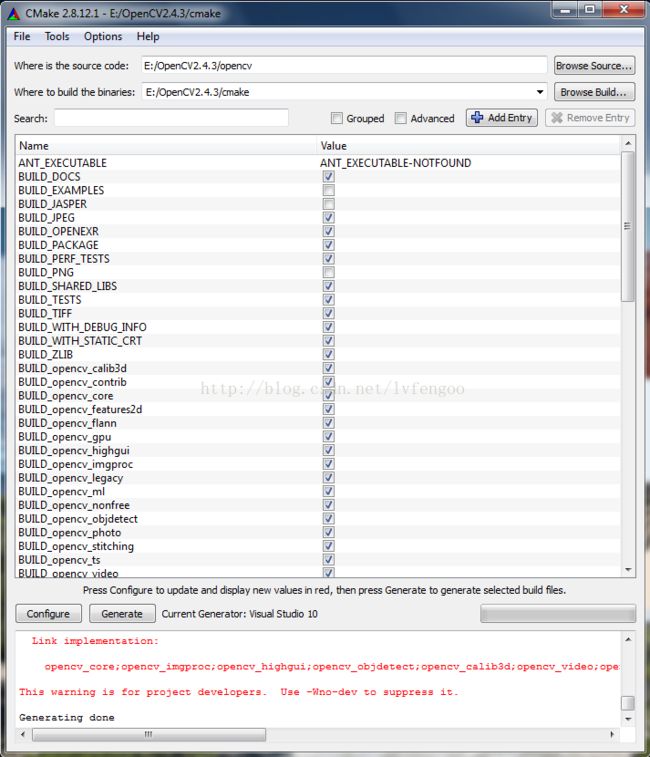
generate done:
5.5 在vs2010中运行OpenCV cmake项目:
打开E:\OpenCV2.4.3\cmake 文件夹中的opencv.sln。分别在debug和release模式下运行opencv项目。(介个应该不用解释吧?)
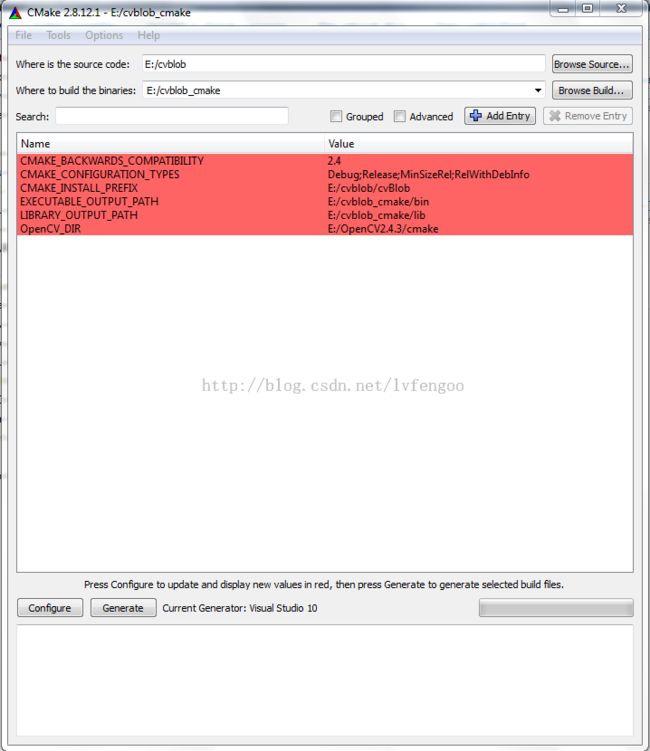
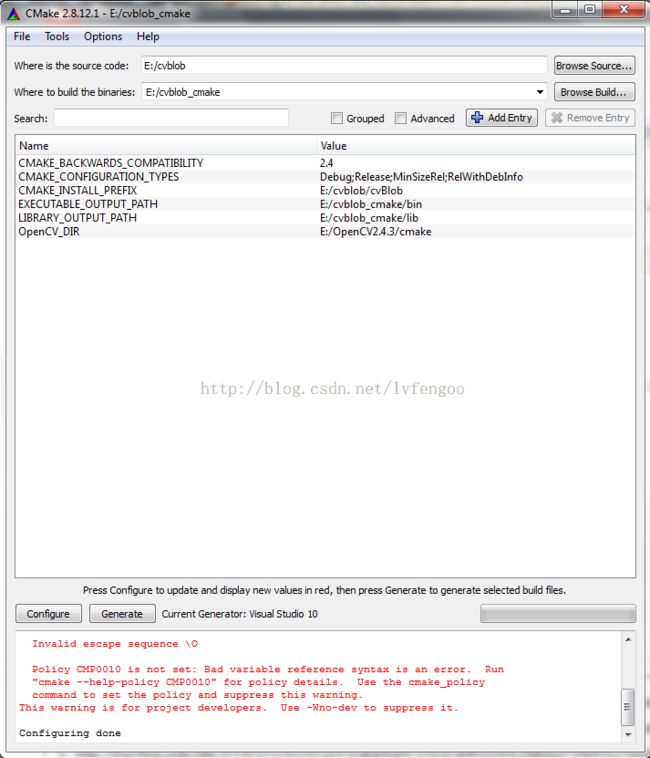
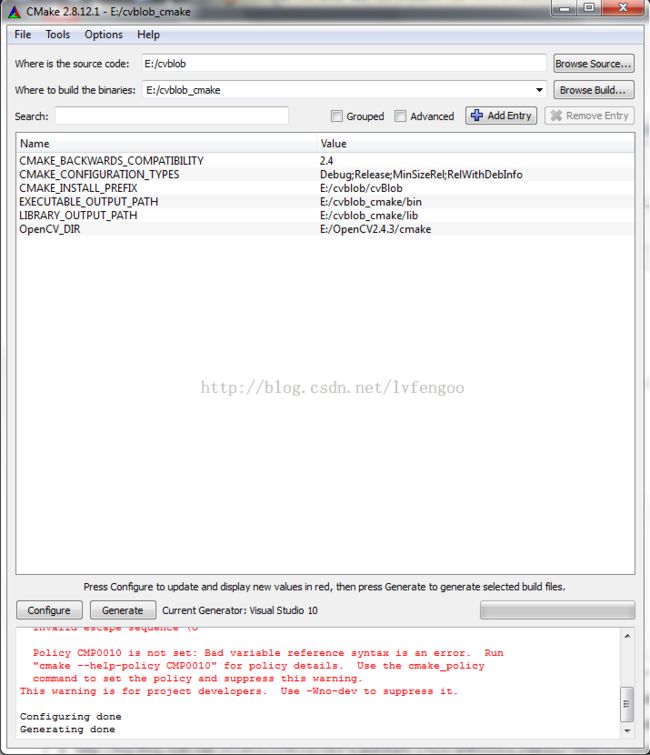
6. 用cmake软件编译(cmake)cvblob 源码: -- 我把cvblob 编译的结果文件夹命名为cvblob_cmake就是where to build the binaries要填写的就是cmake的根目录
其他步骤同上。最终generate成功cvblob_cmake这个vs2010的项目。
以下图像是我已经处理好所有的配置之后的截图:
设置好两个where路径:
configure done:
generation done:
7. 打开cvblob_cmake中生成 vs2010项目(嗯,对就是点击E:\cvblob_cmake目录下的cvBlob.sln)
找到cvblob.h文件
--a. 在其中添加:#define EXPORT __declspec (dllexport)
--b. 在extern "C"块中 每个函数前都添加EXPORT关键字
代码如下: 灰常长。。。我不知道怎么才能折叠。。。
// Copyright (C) 2007 by Cristóbal Carnero Liñán // [email protected] // // This file is part of cvBlob. // // cvBlob is free software: you can redistribute it and/or modify // it under the terms of the Lesser GNU General Public License as published by // the Free Software Foundation, either version 3 of the License, or // (at your option) any later version. // // cvBlob is distributed in the hope that it will be useful, // but WITHOUT ANY WARRANTY; without even the implied warranty of // MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the // Lesser GNU General Public License for more details. // // You should have received a copy of the Lesser GNU General Public License // along with cvBlob. If not, see <http://www.gnu.org/licenses/>. // /// \file cvblob.h /// \brief OpenCV Blob header file. #define EXPORT __declspec (dllexport) #ifdef SWIG %module cvblob %{ #include "cvblob.h" %} #endif #ifndef CVBLOB_H #define CVBLOB_H #include <iostream> #include <map> #include <list> #include <vector> #include <limits> #if (defined(_WIN32) || defined(__WIN32__) || defined(__TOS_WIN__) || defined(__WINDOWS__) || (defined(__APPLE__) & defined(__MACH__))) #include <cv.h> #else #include <opencv/cv.h> #endif #ifndef __CV_BEGIN__ #define __CV_BEGIN__ __BEGIN__ #endif #ifndef __CV_END__ #define __CV_END__ __END__ #endif #ifdef __cplusplus extern "C" { #endif namespace cvb { //////////////////////////////////////////////////////////////////////////////////////////////////////////// // Contours // Chain code: // 7 0 1 // 6 2 // 5 4 3 #define CV_CHAINCODE_UP 0 ///< Up. #define CV_CHAINCODE_UP_RIGHT 1 ///< Up and right. #define CV_CHAINCODE_RIGHT 2 ///< Right. #define CV_CHAINCODE_DOWN_RIGHT 3 ///< Down and right. #define CV_CHAINCODE_DOWN 4 ///< Down. #define CV_CHAINCODE_DOWN_LEFT 5 ///< Down and left. #define CV_CHAINCODE_LEFT 6 ///< Left. #define CV_CHAINCODE_UP_LEFT 7 ///< Up and left. /// \brief Move vectors of chain codes. /// \see CV_CHAINCODE_UP /// \see CV_CHAINCODE_UP_LEFT /// \see CV_CHAINCODE_LEFT /// \see CV_CHAINCODE_DOWN_LEFT /// \see CV_CHAINCODE_DOWN /// \see CV_CHAINCODE_DOWN_RIGHT /// \see CV_CHAINCODE_RIGHT /// \see CV_CHAINCODE_UP_RIGHT const char cvChainCodeMoves[8][2] = { { 0, -1}, { 1, -1}, { 1, 0}, { 1, 1}, { 0, 1}, {-1, 1}, {-1, 0}, {-1, -1} }; /// \brief Direction. /// \see CV_CHAINCODE_UP /// \see CV_CHAINCODE_UP_LEFT /// \see CV_CHAINCODE_LEFT /// \see CV_CHAINCODE_DOWN_LEFT /// \see CV_CHAINCODE_DOWN /// \see CV_CHAINCODE_DOWN_RIGHT /// \see CV_CHAINCODE_RIGHT /// \see CV_CHAINCODE_UP_RIGHT typedef unsigned char CvChainCode; /// \brief Chain code. /// \see CvChainCode typedef std::list<CvChainCode> CvChainCodes; /// \brief Chain code contour. /// \see CvChainCodes struct CvContourChainCode { CvPoint startingPoint; ///< Point where contour begin. CvChainCodes chainCode; ///< Polygon description based on chain codes. }; typedef std::list<CvContourChainCode *> CvContoursChainCode; ///< List of contours (chain codes type). /// \brief Polygon based contour. typedef std::vector<CvPoint> CvContourPolygon; /// \fn void cvRenderContourChainCode(CvContourChainCode const *contour, IplImage const *img, CvScalar const &color=CV_RGB(255, 255, 255)) /// \brief Draw a contour. /// \param contour Chain code contour. /// \param img Image to draw on. /// \param color Color to draw (default, white). /// \see CvContourChainCode EXPORT void cvRenderContourChainCode(CvContourChainCode const *contour, IplImage const *img, CvScalar const &color=CV_RGB(255, 255, 255)); /// \fn CvContourPolygon *cvConvertChainCodesToPolygon(CvContourChainCode const *cc) /// \brief Convert a chain code contour to a polygon. /// \param cc Chain code contour. /// \return A polygon. /// \see CvContourChainCode /// \see CvContourPolygon EXPORT CvContourPolygon *cvConvertChainCodesToPolygon(CvContourChainCode const *cc); /// \fn void cvRenderContourPolygon(CvContourPolygon const *contour, IplImage *img, CvScalar const &color=CV_RGB(255, 255, 255)) /// \brief Draw a polygon. /// \param contour Polygon contour. /// \param img Image to draw on. /// \param color Color to draw (default, white). /// \see CvContourPolygon EXPORT void cvRenderContourPolygon(CvContourPolygon const *contour, IplImage *img, CvScalar const &color=CV_RGB(255, 255, 255)); /// \fn double cvContourPolygonArea(CvContourPolygon const *p) /// \brief Calculates area of a polygonal contour. /// \param p Contour (polygon type). /// \return Area of the contour. EXPORT double cvContourPolygonArea(CvContourPolygon const *p); /// \fn double cvContourChainCodePerimeter(CvContourChainCode const *c) /// \brief Calculates perimeter of a chain code contour. /// \param c Contour (chain code type). /// \return Perimeter of the contour. EXPORT double cvContourChainCodePerimeter(CvContourChainCode const *c); /// \fn double cvContourPolygonPerimeter(CvContourPolygon const *p) /// \brief Calculates perimeter of a polygonal contour. /// \param p Contour (polygon type). /// \return Perimeter of the contour. EXPORT double cvContourPolygonPerimeter(CvContourPolygon const *p); /// \fn double cvContourPolygonCircularity(const CvContourPolygon *p) /// \brief Calculates the circularity of a polygon (compactness measure). /// \param p Contour (polygon type). /// \return Circularity: a non-negative value, where 0 correspond with a circumference. EXPORT double cvContourPolygonCircularity(const CvContourPolygon *p); /// \fn CvContourPolygon *cvSimplifyPolygon(CvContourPolygon const *p, double const delta=1.) /// \brief Simplify a polygon reducing the number of vertex according the distance "delta". /// Uses a version of the Ramer-Douglas-Peucker algorithm (http://en.wikipedia.org/wiki/Ramer-Douglas-Peucker_algorithm). /// \param p Contour (polygon type). /// \param delta Minimun distance. /// \return A simplify version of the original polygon. EXPORT CvContourPolygon *cvSimplifyPolygon(CvContourPolygon const *p, double const delta=1.); /// \fn CvContourPolygon *cvPolygonContourConvexHull(CvContourPolygon const *p) /// \brief Calculates convex hull of a contour. /// Uses the Melkman Algorithm. Code based on the version in http://w3.impa.br/~rdcastan/Cgeometry/. /// \param p Contour (polygon type). /// \return Convex hull. EXPORT CvContourPolygon *cvPolygonContourConvexHull(CvContourPolygon const *p); /// \fn void cvWriteContourPolygonCSV(const CvContourPolygon& p, const std::string& filename) /// \brief Write a contour to a CSV (Comma-separated values) file. /// \param p Polygon contour. /// \param filename File name. EXPORT void cvWriteContourPolygonCSV(const CvContourPolygon& p, const std::string& filename); /// \fn void cvWriteContourPolygonSVG(const CvContourPolygon& p, const std::string& filename, const CvScalar& stroke=cvScalar(0,0,0), const CvScalar& fill=cvScalar(255,255,255)) /// \brief Write a contour to a SVG file (http://en.wikipedia.org/wiki/Scalable_Vector_Graphics). /// \param p Polygon contour. /// \param filename File name. /// \param stroke Stroke color (black by default). /// \param fill Fill color (white by default). EXPORT void cvWriteContourPolygonSVG(const CvContourPolygon& p, const std::string& filename, const CvScalar& stroke=cvScalar(0,0,0), const CvScalar& fill=cvScalar(255,255,255)); //////////////////////////////////////////////////////////////////////////////////////////////////////////// // Blobs /// \brief Type of label. /// \see IPL_DEPTH_LABEL typedef unsigned int CvLabel; //typedef unsigned char CvLabel; /// \def IPL_DEPTH_LABEL /// \brief Size of a label in bits. /// \see CvLabel #define IPL_DEPTH_LABEL (sizeof(cvb::CvLabel)*8) /// \def CV_BLOB_MAX_LABEL /// \brief Max label number. /// \see CvLabel. #define CV_BLOB_MAX_LABEL std::numeric_limits<CvLabel>::max() /// \brief Type of identification numbers. typedef unsigned int CvID; /// \brief Struct that contain information about one blob. struct CvBlob { CvLabel label; ///< Label assigned to the blob. union { unsigned int area; ///< Area (moment 00). unsigned int m00; ///< Moment 00 (area). }; unsigned int minx; ///< X min. unsigned int maxx; ///< X max. unsigned int miny; ///< Y min. unsigned int maxy; ///< y max. CvPoint2D64f centroid; ///< Centroid. double m10; ///< Moment 10. double m01; ///< Moment 01. double m11; ///< Moment 11. double m20; ///< Moment 20. double m02; ///< Moment 02. double u11; ///< Central moment 11. double u20; ///< Central moment 20. double u02; ///< Central moment 02. double n11; ///< Normalized central moment 11. double n20; ///< Normalized central moment 20. double n02; ///< Normalized central moment 02. double p1; ///< Hu moment 1. double p2; ///< Hu moment 2. CvContourChainCode contour; ///< Contour. CvContoursChainCode internalContours; ///< Internal contours. }; /// \var typedef std::map<CvLabel,CvBlob *> CvBlobs /// \brief List of blobs. /// A map is used to access each blob from its label number. /// \see CvLabel /// \see CvBlob typedef std::map<CvLabel,CvBlob *> CvBlobs; /// \var typedef std::pair<CvLabel,CvBlob *> CvLabelBlob /// \brief Pair (label, blob). /// \see CvLabel /// \see CvBlob typedef std::pair<CvLabel,CvBlob *> CvLabelBlob; /// \fn unsigned int cvLabel (IplImage const *img, IplImage *imgOut, CvBlobs &blobs); /// \brief Label the connected parts of a binary image. /// Algorithm based on paper "A linear-time component-labeling algorithm using contour tracing technique" of Fu Chang, Chun-Jen Chen and Chi-Jen Lu. /// \param img Input binary image (depth=IPL_DEPTH_8U and num. channels=1). /// \param imgOut Output image (depth=IPL_DEPTH_LABEL and num. channels=1). /// \param blobs List of blobs. /// \return Number of pixels that has been labeled. EXPORT unsigned int cvLabel (IplImage const *img, IplImage *imgOut, CvBlobs &blobs); //IplImage *cvFilterLabel(IplImage *imgIn, CvLabel label); /// \fn void cvFilterLabels(IplImage *imgIn, IplImage *imgOut, const CvBlobs &blobs) /// \brief Draw a binary image with the blobs that have been given. /// \param imgIn Input image (depth=IPL_DEPTH_LABEL and num. channels=1). /// \param imgOut Output binary image (depth=IPL_DEPTH_8U and num. channels=1). /// \param blobs List of blobs to be drawn. /// \see cvLabel EXPORT void cvFilterLabels(IplImage *imgIn, IplImage *imgOut, const CvBlobs &blobs); /// \fn CvLabel cvGetLabel(IplImage const *img, unsigned int x, unsigned int y) /// \brief Get the label value from a labeled image. /// \param img Label image. /// \param x X coordenate. /// \param y Y coordenate. /// \return Label value. /// \see CvLabel EXPORT CvLabel cvGetLabel(IplImage const *img, unsigned int x, unsigned int y); /// \fn inline void cvReleaseBlob(CvBlob *blob) /// \brief Clear a blob structure. /// \param blob Blob. /// \see CvBlob EXPORT inline void cvReleaseBlob(CvBlob *blob) { if (blob) { for (CvContoursChainCode::iterator jt=blob->internalContours.begin(); jt!=blob->internalContours.end(); ++jt) { CvContourChainCode *contour = *jt; if (contour) delete contour; } blob->internalContours.clear(); delete blob; } } /// \fn inline void cvReleaseBlobs(CvBlobs &blobs) /// \brief Clear blobs structure. /// \param blobs List of blobs. /// \see CvBlobs EXPORT inline void cvReleaseBlobs(CvBlobs &blobs) { for (CvBlobs::iterator it=blobs.begin(); it!=blobs.end(); ++it) { cvReleaseBlob((*it).second); } blobs.clear(); } /// \fn CvLabel cvLargestBlob(const CvBlobs &blobs) /// \brief Find largest blob (biggest area). /// \param blobs List of blobs. /// \return Label of the largest blob or 0 if there are no blobs. /// \see cvLabel EXPORT CvLabel cvLargestBlob(const CvBlobs &blobs); EXPORT inline CvLabel cvGreaterBlob(const CvBlobs &blobs) { return cvLargestBlob(blobs); } /// \fn void cvFilterByArea(CvBlobs &blobs, unsigned int minArea, unsigned int maxArea) /// \brief Filter blobs by area. /// Those blobs whose areas are not in range will be erased from the input list of blobs. /// \param blobs List of blobs. /// \param minArea Minimun area. /// \param maxArea Maximun area. EXPORT void cvFilterByArea(CvBlobs &blobs, unsigned int minArea, unsigned int maxArea); /// \fn void cvFilterByLabel(CvBlobs &blobs, CvLabel label) /// \brief Filter blobs by label. /// Delete all blobs except those with label l. /// \param blobs List of blobs. /// \param label Label to leave. EXPORT void cvFilterByLabel(CvBlobs &blobs, CvLabel label); /// \fn inline CvPoint2D64f cvCentroid(CvBlob *blob) /// \brief Calculates centroid. /// Centroid will be returned and stored in the blob structure. /// \param blob Blob whose centroid will be calculated. /// \return Centroid. /// \see CvBlob EXPORT inline CvPoint2D64f cvCentroid(CvBlob *blob) { return blob->centroid=cvPoint2D64f(blob->m10/blob->area, blob->m01/blob->area); } /// \fn double cvAngle(CvBlob *blob) /// \brief Calculates angle orientation of a blob. /// \param blob Blob. /// \return Angle orientation in radians. /// \see CvBlob EXPORT double cvAngle(CvBlob *blob); /// \fn cvSaveImageBlob(const char *filename, IplImage *img, CvBlob const *blob) /// \brief Save the image of a blob to a file. /// The function uses an image (that can be the original pre-processed image or a processed one, or even the result of cvRenderBlobs, for example) and a blob structure. /// Then the function saves a copy of the part of the image where the blob is. /// \param filename Name of the file. /// \param img Image. /// \param blob Blob. /// \see CvBlob /// \see cvRenderBlob EXPORT void cvSaveImageBlob(const char *filename, IplImage *img, CvBlob const *blob); #define CV_BLOB_RENDER_COLOR 0x0001 ///< Render each blog with a different color. \see cvRenderBlobs #define CV_BLOB_RENDER_CENTROID 0x0002 ///< Render centroid. \see cvRenderBlobs #define CV_BLOB_RENDER_BOUNDING_BOX 0x0004 ///< Render bounding box. \see cvRenderBlobs #define CV_BLOB_RENDER_ANGLE 0x0008 ///< Render angle. \see cvRenderBlobs #define CV_BLOB_RENDER_TO_LOG 0x0010 ///< Print blob data to log out. \see cvRenderBlobs #define CV_BLOB_RENDER_TO_STD 0x0020 ///< Print blob data to std out. \see cvRenderBlobs /// \fn void cvRenderBlob(const IplImage *imgLabel, CvBlob *blob, IplImage *imgSource, IplImage *imgDest, unsigned short mode=0x000f, CvScalar const &color=CV_RGB(255, 255, 255), double alpha=1.) /// \brief Draws or prints information about a blob. /// \param imgLabel Label image (depth=IPL_DEPTH_LABEL and num. channels=1). /// \param blob Blob. /// \param imgSource Input image (depth=IPL_DEPTH_8U and num. channels=3). /// \param imgDest Output image (depth=IPL_DEPTH_8U and num. channels=3). /// \param mode Render mode. By default is CV_BLOB_RENDER_COLOR|CV_BLOB_RENDER_CENTROID|CV_BLOB_RENDER_BOUNDING_BOX|CV_BLOB_RENDER_ANGLE. /// \param color Color to render (if CV_BLOB_RENDER_COLOR is used). /// \param alpha If mode CV_BLOB_RENDER_COLOR is used. 1.0 indicates opaque and 0.0 translucent (1.0 by default). /// \see CV_BLOB_RENDER_COLOR /// \see CV_BLOB_RENDER_CENTROID /// \see CV_BLOB_RENDER_BOUNDING_BOX /// \see CV_BLOB_RENDER_ANGLE /// \see CV_BLOB_RENDER_TO_LOG /// \see CV_BLOB_RENDER_TO_STD EXPORT void cvRenderBlob(const IplImage *imgLabel, CvBlob *blob, IplImage *imgSource, IplImage *imgDest, unsigned short mode=0x000f, CvScalar const &color=CV_RGB(255, 255, 255), double alpha=1.); /// \fn void cvRenderBlobs(const IplImage *imgLabel, CvBlobs &blobs, IplImage *imgSource, IplImage *imgDest, unsigned short mode=0x000f, double alpha=1.) /// \brief Draws or prints information about blobs. /// \param imgLabel Label image (depth=IPL_DEPTH_LABEL and num. channels=1). /// \param blobs List of blobs. /// \param imgSource Input image (depth=IPL_DEPTH_8U and num. channels=3). /// \param imgDest Output image (depth=IPL_DEPTH_8U and num. channels=3). /// \param mode Render mode. By default is CV_BLOB_RENDER_COLOR|CV_BLOB_RENDER_CENTROID|CV_BLOB_RENDER_BOUNDING_BOX|CV_BLOB_RENDER_ANGLE. /// \param alpha If mode CV_BLOB_RENDER_COLOR is used. 1.0 indicates opaque and 0.0 translucent (1.0 by default). /// \see CV_BLOB_RENDER_COLOR /// \see CV_BLOB_RENDER_CENTROID /// \see CV_BLOB_RENDER_BOUNDING_BOX /// \see CV_BLOB_RENDER_ANGLE /// \see CV_BLOB_RENDER_TO_LOG /// \see CV_BLOB_RENDER_TO_STD EXPORT void cvRenderBlobs(const IplImage *imgLabel, CvBlobs &blobs, IplImage *imgSource, IplImage *imgDest, unsigned short mode=0x000f, double alpha=1.); /// \fn void cvSetImageROItoBlob(IplImage *img, CvBlob const *blob) /// \brief Set the ROI of an image to the bounding box of a blob. /// \param img Image. /// \param blob Blob. /// \see CvBlob EXPORT inline void cvSetImageROItoBlob(IplImage *img, CvBlob const *blob) { cvSetImageROI(img, cvRect(blob->minx, blob->miny, blob->maxx-blob->minx, blob->maxy-blob->miny)); }; //////////////////////////////////////////////////////////////////////////////////////////////////////////// // Color /// \fn CvScalar cvBlobMeanColor(CvBlob const *blob, IplImage const *imgLabel, IplImage const *img) /// \brief Calculates mean color of a blob in an image. /// \param blob Blob. /// \param imgLabel Image of labels. /// \param img Original image. /// \return Average color. EXPORT CvScalar cvBlobMeanColor(CvBlob const *blob, IplImage const *imgLabel, IplImage const *img); //////////////////////////////////////////////////////////////////////////////////////////////////////////// // Aux /// \fn double cvDotProductPoints(CvPoint const &a, CvPoint const &b, CvPoint const &c) /// \brief Dot product of the vectors ab and bc. /// \param a First point. /// \param b Middle point. /// \param c Last point. /// \return Dot product of ab and bc. EXPORT double cvDotProductPoints(CvPoint const &a, CvPoint const &b, CvPoint const &c); /// \fn double cvCrossProductPoints(CvPoint const &a, CvPoint const &b, CvPoint const &c) /// \brief Cross product of the vectors ab and bc. /// \param a Point. /// \param b Point. /// \param c Point. /// \return Cross product of ab and bc. EXPORT double cvCrossProductPoints(CvPoint const &a, CvPoint const &b, CvPoint const &c); /// \fn double cvDistancePointPoint(CvPoint const &a, CvPoint const &b) /// \brief Distance between two points. /// \param a Point. /// \param b Point. /// \return Distance. EXPORT double cvDistancePointPoint(CvPoint const &a, CvPoint const &b); /// \fn double cvDistanceLinePoint(CvPoint const &a, CvPoint const &b, CvPoint const &c, bool isSegment=true) /// \brief Distance between line ab and point c. /// \param a First point of the segment. /// \param b Second point of the segment. /// \param c Point. /// \param isSegment If false then the distance will be calculated from the line defined by the points a and b, to the point c. /// \return Distance between ab and c. EXPORT double cvDistanceLinePoint(CvPoint const &a, CvPoint const &b, CvPoint const &c, bool isSegment=true); //////////////////////////////////////////////////////////////////////////////////////////////////////////// // Tracking /// \brief Struct that contain information about one track. /// \see CvID /// \see CvLabel struct CvTrack { CvID id; ///< Track identification number. CvLabel label; ///< Label assigned to the blob related to this track. unsigned int minx; ///< X min. unsigned int maxx; ///< X max. unsigned int miny; ///< Y min. unsigned int maxy; ///< y max. CvPoint2D64f centroid; ///< Centroid. unsigned int lifetime; ///< Indicates how much frames the object has been in scene. unsigned int active; ///< Indicates number of frames that has been active from last inactive period. unsigned int inactive; ///< Indicates number of frames that has been missing. }; /// \var typedef std::map<CvID, CvTrack *> CvTracks /// \brief List of tracks. /// \see CvID /// \see CvTrack typedef std::map<CvID, CvTrack *> CvTracks; /// \var typedef std::pair<CvID, CvTrack *> CvIDTrack /// \brief Pair (identification number, track). /// \see CvID /// \see CvTrack typedef std::pair<CvID, CvTrack *> CvIDTrack; /// \fn inline void cvReleaseTracks(CvTracks &tracks) /// \brief Clear tracks structure. /// \param tracks List of tracks. /// \see CvTracks EXPORT inline void cvReleaseTracks(CvTracks &tracks) { for (CvTracks::iterator it=tracks.begin(); it!=tracks.end(); it++) { CvTrack *track = (*it).second; if (track) delete track; } tracks.clear(); } /// \fn cvUpdateTracks(CvBlobs const &b, CvTracks &t, const double thDistance, const unsigned int thInactive, const unsigned int thActive=0) /// \brief Updates list of tracks based on current blobs. /// Tracking based on: /// A. Senior, A. Hampapur, Y-L Tian, L. Brown, S. Pankanti, R. Bolle. Appearance Models for /// Occlusion Handling. Second International workshop on Performance Evaluation of Tracking and /// Surveillance Systems & CVPR'01. December, 2001. /// (http://www.research.ibm.com/peoplevision/PETS2001.pdf) /// \param b List of blobs. /// \param t List of tracks. /// \param thDistance Max distance to determine when a track and a blob match. /// \param thInactive Max number of frames a track can be inactive. /// \param thActive If a track becomes inactive but it has been active less than thActive frames, the track will be deleted. /// \see CvBlobs /// \see Tracks EXPORT void cvUpdateTracks(CvBlobs const &b, CvTracks &t, const double thDistance, const unsigned int thInactive, const unsigned int thActive=0); #define CV_TRACK_RENDER_ID 0x0001 ///< Print the ID of each track in the image. \see cvRenderTracks #define CV_TRACK_RENDER_BOUNDING_BOX 0x0002 ///< Draw bounding box of each track in the image. \see cvRenderTracks #define CV_TRACK_RENDER_TO_LOG 0x0010 ///< Print track info to log out. \see cvRenderTracks #define CV_TRACK_RENDER_TO_STD 0x0020 ///< Print track info to log out. \see cvRenderTracks /// \fn void cvRenderTracks(CvTracks const tracks, IplImage *imgSource, IplImage *imgDest, unsigned short mode=0x00ff, CvFont *font=NULL) /// \brief Prints tracks information. /// \param tracks List of tracks. /// \param imgSource Input image (depth=IPL_DEPTH_8U and num. channels=3). /// \param imgDest Output image (depth=IPL_DEPTH_8U and num. channels=3). /// \param mode Render mode. By default is CV_TRACK_RENDER_ID|CV_TRACK_RENDER_BOUNDING_BOX. /// \param font OpenCV font for print on the image. /// \see CV_TRACK_RENDER_ID /// \see CV_TRACK_RENDER_BOUNDING_BOX /// \see CV_TRACK_RENDER_TO_LOG /// \see CV_TRACK_RENDER_TO_STD EXPORT void cvRenderTracks(CvTracks const tracks, IplImage *imgSource, IplImage *imgDest, unsigned short mode=0x000f, CvFont *font=NULL); } #ifdef __cplusplus } #endif /// \fn std::ostream& operator<< (std::ostream& output, const cvb::CvBlob& b) /// \brief Overload operator "<<" for printing blob structure. /// \return Stream. std::ostream& operator<< (std::ostream& output, const cvb::CvBlob& b); /// \fn std::ostream& operator<< (std::ostream& output, const cvb::CvContourPolygon& p) /// \brief Overload operator "<<" for printing polygons in CSV format. /// \return Stream. std::ostream& operator<< (std::ostream& output, const cvb::CvContourPolygon& p); /// \fn std::ostream& operator<< (std::ostream& output, const cvb::CvTrack& t) /// \brief Overload operator "<<" for printing track structure. /// \return Stream. std::ostream& operator<< (std::ostream& output, const cvb::CvTrack& t); #endif
8. 编译运行cvblob cmake生成的solution(E:\cvblob_cmake 这个文件夹下的vs2010项目), 分别在Debug模式和Release模式下运行该solution。
这样在E:\cvblob_cmake\lib 目录下的Debug和Release文件夹下分别生成相应的cvblob.lib和cvblob.dll文件。
-----------------------------------------cvblob如何应用-----------------------------------------------------
1. vs2010项目中:
属性VC++ Directories中的Include Directories 里面添加E:\cvblob\cvBlob -- 你的cvblob文件夹
Libraries里添加 E:\cvblob_cmake\lib\Debug 目录
将E:\cvblob_cmake\lib\Debug 文件夹中的cvblob.dll和cvblob.lib两个文件copy到解决方案的debug文件夹里。
同理,将E:\cvblob_cmake\lib\Release文件夹中的cvblob.dll和cvblob.lib两个文件copy到解决方案的release文件夹里
linker-Input属性中:加入 cvblob.lib
2. cpp文件里加入:
#include <cvblob.h>
using namespace cvb;
----------------------------------------------cvblob测试---------------------------------------------------------
在cvblob_cmake解决方案里,有test, test_tracking, test_random,三个用来测试的代码。
按照上面的使用说明,配置好环境。
然后运行。