V4L2视频应用程序编程架构
V4L2较V4L1有较大的改动,并已成为2.6的标准接口。下边先就V4L2在视频捕捉或camera方面的应用框架。
V4L2采用流水线的方式,操作更简单直观,基本遵循打开视频设备、设置格式、处理数据、关闭设备,更多的具体操作通过ioctl函数来实现。
1、打开视频设备
在V4L2中,视频设备被看做一个文件。使用open函数打开这个设备:
int cameraFd;
cameraFd = open("/dev/video0", O_RDWR, 0); //用阻塞模式打开摄像头设备
2、设定属性及采集方式
打开视频设备后,可以设置该视频设备的属性,例如裁剪、缩放等。这一步是可选的。在Linux编程中,一般使用ioctl函数来对设备的I/O通道进行管理:
int ioctl (int __fd, unsigned long int __request, .../*args*/) ;
在进行V4L2开发中,常用的命令标志符如下(some are optional)即常用的IOCTL接口命令在include/linux/videodev2.h中定义:
VIDIOC_REQBUFS:分配内存
VIDIOC_QUERYBUF:把VIDIOC_REQBUFS中分配的数据缓存转换成物理地址
VIDIOC_QUERYCAP:查询驱动功能
VIDIOC_ENUM_FMT:获取当前驱动支持的视频格式
VIDIOC_S_FMT:设置当前驱动的频捕获格式
VIDIOC_G_FMT:读取当前驱动的频捕获格式
VIDIOC_TRY_FMT:验证当前驱动的显示格式
VIDIOC_CROPCAP:查询驱动的修剪能力
VIDIOC_S_CROP:设置视频信号的边框
VIDIOC_G_CROP:读取视频信号的边框
VIDIOC_QBUF:把数据从缓存中读取出来
VIDIOC_DQBUF:把数据放回缓存队列
VIDIOC_STREAMON:开始视频显示函数
VIDIOC_STREAMOFF:结束视频显示函数
VIDIOC_QUERYSTD:检查当前视频设备支持的标准,例如PAL或NTSC。
常用的结构体在内核目录include/linux/videodev2.h中定义
struct v4l2_requestbuffers //申请帧缓冲,对应命令VIDIOC_REQBUFS
struct v4l2_capability //视频设备的功能,对应命令VIDIOC_QUERYCAP
struct v4l2_input //视频输入信息,对应命令VIDIOC_ENUMINPUT
struct v4l2_standard //视频的制式,比如PAL,NTSC,对应命令 VIDIOC_ENUMSTD
struct v4l2_format //帧的格式,对应命令VIDIOC_G_FMT、VIDIOC_S_FMT等
struct v4l2_buffer //驱动中的一帧图像缓存,对应命令VIDIOC_QUERYBUF
struct v4l2_crop //视频信号矩形边
v4l2_std_id //视频制式
2.1检查当前视频设备支持的标准
在亚洲,一般使用PAL(720X576)制式的摄像头,而欧洲一般使用NTSC(720X480),使用VIDIOC_QUERYSTD来检测:
v4l2_std_id std;
do {
ret = ioctl(fd, VIDIOC_QUERYSTD, &std);
} while (ret == -1 && errno == EAGAIN);
switch (std) {
case V4L2_STD_NTSC:
//……
case V4L2_STD_PAL:
//……
}
2.2 设置视频捕获格式
当检测完视频设备支持的标准后,还需要设定视频捕获格式,结构如下:
struct v4l2_format fmt;
memset ( &fmt, 0, sizeof(fmt) );
fmt.type = V4L2_BUF_TYPE_VIDEO_CAPTURE;
fmt.fmt.pix.width = 720;
fmt.fmt.pix.height = 576;
fmt.fmt.pix.pixelformat = V4L2_PIX_FMT_YUYV;
fmt.fmt.pix.field = V4L2_FIELD_INTERLACED;
if (ioctl(fd, VIDIOC_S_FMT, &fmt) == -1) {
return -1;
}
v4l2_format结构如下:
struct v4l2_format
{
enum v4l2_buf_type type; // 数据流类型,必须永远是V4L2_BUF_TYPE_VIDEO_CAPTURE
union
{
struct v4l2_pix_format pix;
struct v4l2_window win;
struct v4l2_vbi_format vbi;
__u8 raw_data[200];
} fmt;
};
struct v4l2_pix_format
{
__u32 width; // 宽,必须是16的倍数
__u32 height; // 高,必须是16的倍数
__u32 pixelformat; // 视频数据存储类型YUV422、RGB
enum v4l2_field field;
__u32 bytesperline;
__u32 sizeimage;
enum v4l2_colorspace colorspace;
__u32 priv;
};
2.3 分配内存
接下来可以为视频捕获分配内存:
struct v4l2_requestbuffers req;
if (ioctl(fd, VIDIOC_REQBUFS, &req) == -1) {
return -1;
}
v4l2_requestbuffers 结构如下:
struct v4l2_requestbuffers
{
__u32 count; // 缓存数量
enum v4l2_buf_type type; // 数据流类型,必须永远是V4L2_BUF_TYPE_VIDEO_CAPTURE
enum v4l2_memory memory; // V4L2_MEMORY_MMAP 或 V4L2_MEMORY_USERPTR
__u32 reserved[2];
};
2.4 获取并记录缓存的物理空间
使用VIDIOC_REQBUFS,我们获取了req.count个缓存,下一步通过调用VIDIOC_QUERYBUF命令来获取这些缓存的地址,然后使用mmap函数转换成应用程序中的绝对地址,最后把这段缓存放入缓存队列:
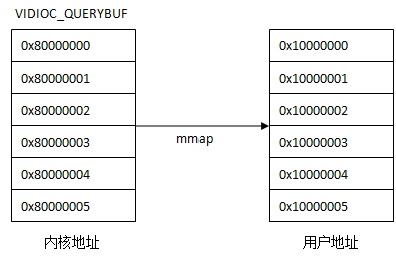
图1 摄像头内存映射示意图
typedef struct VideoBuffer {
void *start;
size_t length;
} VideoBuffer;
VideoBuffer* buffers = calloc( req.count, sizeof(*buffers) );
struct v4l2_buffer buf;
for (numBufs = 0; numBufs < req.count; numBufs++) {
memset( &buf, 0, sizeof(buf) );
buf.type = V4L2_BUF_TYPE_VIDEO_CAPTURE;
buf.memory = V4L2_MEMORY_MMAP;
buf.index = numBufs;
// 读取缓存
if (ioctl(fd, VIDIOC_QUERYBUF, &buf) == -1) {
return -1;
}
buffers[numBufs].length = buf.length;
// 转换成相对地址
buffers[numBufs].start = mmap(NULL, buf.length, PROT_READ | PROT_WRITE,
MAP_SHARED,fd, buf.m.offset);
if (buffers[numBufs].start == MAP_FAILED) {
return -1;
}
// 放入缓存队列
if (ioctl(fd, VIDIOC_QBUF, &buf) == -1) {
return -1;
}
}
2.5 视频采集方式
操作系统一般把系统使用的内存划分成用户空间和内核空间,分别由应用程序管理和操作系统管理。应用程序可以直接访问内存的地址,而内核空间存放的是供内核访问的代码和数据,用户不能直接访问。v4l2捕获的数据,最初是存放在内核空间的,这意味着用户不能直接访问该段内存,必须通过某些手段来转换地址。
一共有三种视频采集方式:使用read、write方式;内存映射方式和用户指针模式。
read、write方式,在用户空间和内核空间不断拷贝数据,占用了大量用户内存空间,效率不高。
内存映射方式:把设备里的内存映射到应用程序中的内存控件,直接处理设备内存,这是一种有效的方式。上面的mmap函数就是使用这种方式。
用户指针模式:内存片段由应用程序自己分配。这点需要在v4l2_requestbuffers里将memory字段设置成V4L2_MEMORY_USERPTR。
2.6 处理采集数据
V4L2有一个数据缓存,存放req.count数量的缓存数据。数据缓存采用FIFO的方式,当应用程序调用缓存数据时,缓存队列将最先采集到的视频数据缓存送出,并重新采集一张视频数据。这个过程需要用到两个ioctl命令,VIDIOC_DQBUF和VIDIOC_QBUF:
struct v4l2_buffer buf;
memset(&buf,0,sizeof(buf));
buf.type=V4L2_BUF_TYPE_VIDEO_CAPTURE;
buf.memory=V4L2_MEMORY_MMAP;
buf.index=0;
//读取缓存
if (ioctl(cameraFd, VIDIOC_DQBUF, &buf) == -1)
{
return -1;
}
//…………视频处理算法
//重新放入缓存队列
if (ioctl(cameraFd, VIDIOC_QBUF, &buf) == -1) {
return -1;
}
3. 关闭视频设备
使用close函数关闭一个视频设备
close(cameraFd)
如果使用mmap,最后还需要使用munmap方法。
本程序中使用了mmap的读取图像的方法,缓存中仅申请了1帧图像空间。下图为调用V4L2获取摄像头图像的基本流程:

图2 V4L2读取摄像头图像流程图SHI
上面的V4L2应用程序编程架构只是一般步骤,自己使用时可能稍有不同,
这里我分享一个测试虚拟视频驱动vivi.c的程序,可以作为很不错的基础架构参考
![]() capture_image.rar
capture_image.rar
将在下一个章节中结合用户层和kernel层具体详细分析驱动的实现过程,直观体现用户层的每一个动作,驱动所作出的响应
待续。。。。。。