px4的模式与状态
一、模式
PX4 native flight stack
| String |
Description and notes |
| MANUAL |
|
| ACRO |
|
| ALTCTL |
|
| POSCTL |
|
| OFFBOARD |
|
| STABILIZED |
|
| RATTITUDE |
*in master branch* |
| AUTO.MISSION |
SET_MODE restricted to this AUTO mode (firmware ignore submode). |
| AUTO.LOITER |
|
| AUTO.RTL |
|
| AUTO.LAND |
|
| AUTO.RTGS |
|
| AUTO.READY |
|
| AUTO.TAKEOFF |
|
在Pixhawk中基本模式可以分为使用用户模式(custom mode)还是基本模式(这里有点绕,其实是就是是否使用用户模式)。使用用户模式将在讲下个参数时说明,使用基本模式又会分为自动模式(auto),位置控制模式(posctl)和手动模式(manual)。一般情况下都会使用用户模式,普通用户不用关心这个参数。开发者在使用mavlink修改飞行器模式时需要注意基本模式的设置。
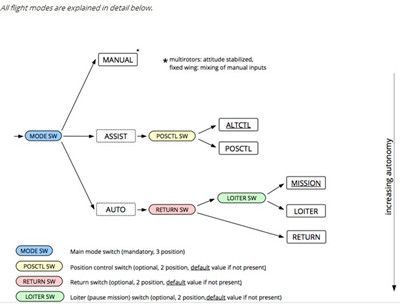
Pixhawk的用户模式:它分为主模式(main mode)和子模式(sub mode),两种模式组合在一起成为最终的模式,主模式分为3种,手动(manual),辅助(assist),自动(auto)。
手动manual模式类似apm的姿态模式。
在辅助模式ASSIST中,又分为高度控制模式(altctl)和位置控制模式(posctl)两个子模式,高度控制模式就类似apm的定高模式,油门对应到飞行器高度控制上。位置模式控制飞行器相对地面的速度,油门和高度控制模式一样,yaw轴控制和手动模式一样。
自动模式AUTO里又分为3个子模式,任务模式(mission),留待模式(loiter),返航模式(return),任务模式就是执行设定好的航点任务,留待模式就是gps悬停模式,返航模式就是直线返回home点并自动降落。
Offboard模式是使用外部电脑(软件)与pixhawk相连,并进行控制。offboard 命令一般发送位置/姿态/速度/加速度 信息给控制器执行。相应的mavlink消息主要是SET_ATTITUDE_TARGET和SET_POSITION_TARGET_LOCAL_NED
二、状态
系统状态(system status),查定义就好了,其中的standby状态在Pixhawk里就是还没解锁的状态,active状态就是已经解锁,准备起飞的状态。
三、消息
消息(command long),该消息是发送长命令,一般是地面站发送给飞控命令用的。