UART0串口编程系列(四)UC/OS下的串口发送任务
一.在UC/OS中设计串口程序所要考虑的问题
1. 串口通信数据以帧为单位进行处理,如果需要接收大量数据,则帧缓冲区规模必然很大;如果需要发送大量数据,则可将原始数据快看作缓冲区,不需要另外再创建帧缓冲区。
2. 帧缓冲区是全局数据结构,通常为共享资源,需要考虑互斥访问问题(如在任务中关中断)。但是此时系统的效率就会下降。我们可以通过合理设计通信任务,将对帧缓冲区进行读/写操作的双方封装到一个任务里,是帧缓冲区称为这个任务的私有数据结构,不再是共享资源, 次时就不需要互斥信号量了。
3. 在UC/OS操作系统中串口发送和串口接收函数都被设计成了任务。
Tiger-john说明:
在UC/OS上编写串口编程时,主要是考虑以上问题。其它的方面就是UART0的配置以及如何编写中断程序这些方面在前面已经提过,再此不再涉及。
如果你还不是很明白的话请看我《UART0串口编程系列》文章的前半部分。
二.UC/OS串口编程
通过一个程序来分析UC/OS串口编程设计和实现:
程序实现的目标:
通过按键来控制串口发送任务80字节的帧,每次发送8字节,分25次发送完。
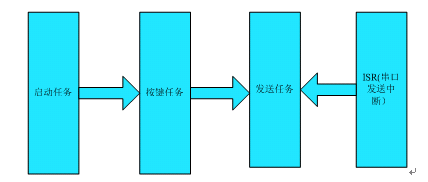
1.在UC/OS串口编程中由那几个任务组成
1>启动任务
2>按键任务(此任务可以根据不同的程序设计内容来改变)
3>发送任务
4>串口发送中断
2.各个任务之间的关系
3.启动任务流程:
l 定义各种通信工具(例如:信号量)
l 系统硬件初始化
l 初始化UART0
l 创建各个任务
l 创建各种通信工具
l 删除自己

图3启动任务流程图
程序:
/**********************************************************
* 名称: UART0_Init
* 功能: UART0初始化 通讯波特率115200,8位数据位,1位停止位,无奇偶校验,使能TxFIFO,和THRE中断
* 入口参数: bps 串口波特率
* 出口参数: 无
**********************************************************/
void UART0_Init(uint32 bps)
{
uint16 Fdiv;
PINSEL0 = (PINSEL0 & ~(0xf) | 0x05) ; //设置UART0的引脚
U0LCR = 0x83;
Fdiv = (Fpclk>>4)/bps;
U0DLM = Fdiv>>8;
U0DLL = Fdiv%256;
U0LCR = 0x03;
U0FCR = 0x05; // 使能TxFIFO
U0IER = 0x02; //使能THRE中断
}
/**********************************************************
* 作者:tiger-john
* 时间:2011年1月21
* 名称:Task0 启动任务
* 功能:初始化硬件,创建其他任务,
* 入口参数:pdata
**********************************************************/
void Task0 (void *pdata)
{
pdata = pdata;
//硬件初始化
TargetInit ();
//初始化串口
UART0_Init(115200);
//创建按键信号量
Sem_ButtonFlag = OSSemCreate(0);
//创建发送信号量
Sem_SendFlg = OSSemCreate(0);
//创建按键任务
OSTaskCreate(Task1,(void *)0, &TaskStk1[TaskStkLengh - 1],10);
OSTaskCreate(Task2,(void *)0, &TaskStk2[1000 - 1],6); //创建发送任务
OSTaskDel(OS_PRIO_SELF); //删除自己
}
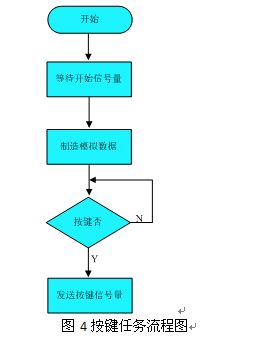
4.按键任务流程:
l 等待开始信号量
l 制造模拟数据
l 按键按下发送信号量,否则延迟等待
程序:
/**********************************************************
** Task1(按键任务)
**********************************************************/
void Task1 (void *pdata)
{
uint8 i;
uint8 err;
pdata = pdata;
while(1)
{
OSSemPend(Sem_StartFlag,0,&err); //等带开始信号量
for(i = 0;i < 80;i++)
{
send_buf[i] = i ; //制造模拟数据。
}
while((IO0PIN & KEY ) != 0); //等带按键
OSSemPost(Sem_ButtonFlag); //发送按键信号量
}
}
5.发送任务流程:
l 等待按键信号量
l 打开串口中断
l 发送10次
l 等待发送信号量
l 发送8字节
l 关发送串口中断
l 发送开始信号量

程序:
/************************************************************ Task2(发送任务)
**********************************************************/
void Task2 (void *pdata)
{
uint8 i,j,err;
pdata = pdata;
while(1)
{
OSSemPend(Sem_ButtonFlag,0,&err); //等待按键信号量
U0IER = U0IER | 0x02; //打开串口发送中断
for(i = 0;i < 10;i++) //发送10次
{
for(j = 0;j < 8;j++) //每次8字节
{
U0THR = send_buf[i*8+j];
}
OSSemPend(Sem_SendFlag,0,&err); //等待发送信号量
}
U0IER = U0IER & ~0x02; //关掉串口中断
OSSemPost(Sem_StartFlag); //发送开始信号量
}
}
6.串口发送中断流程:
l 关中断
l 清除中断控制标志位
l 清除串口中断标志位
l 开中断
l 发送发送信号量

/**********************************************************
* 名 称: UART0_Exception
* 功 能: 串口发送中断
* 入口参数: 无
* 出口参数: data 发送的数据
**********************************************************/
void UART0_Exception(void)
{
uint32 data;
OS_ENTER_CRITICAL(); //关中断
VICVectAddr = 0; //清除中断
data = U0IIR; //清除中断表示寄存器标志
OS_EXIT_CRITICAL(); //开中断
OSSemPost(Sem_SendFlag); //发出发送信号量
}
7.总的程序如下:
- /****************************************Copyright (c)**************************************************
- ** 西安邮电学院
- ** graduate school
- ** XNMS实验室
- ** Author:冀博
- ** Time:2011年1月21日
- ** http://blog.csdn.net/tigerjb
- **
- **--------------File Info-------------------------------------------------------------------------------
- ** File name: UART0_while
- ** Last modified Date: 2011-01-20
- ** Last Version: 1.0
- ** Descriptions: 当按键按下后,串口发送中断给上位机发送80字节数据
- **-----------------------------------------------------------------------------------------------------
- /******************************************************************************
- ** Modified by: TIGER0-JOHN
- ** Modified date: 2011-1-21
- ** Version: 1.1
- ** Descriptions: 测试成功
- ****************************************************************************/
- #include "config.h"
- #include "stdlib.h"
- #define KEY 1<<20 //设置为触发按键
- #define TaskStkLengh 64 //Define the Task0(启动任务) 堆栈长度
- #define TaskStkLengh 64 //Define the Task1(按键任务) 堆栈长度
- #define TaskStkLengh 64 //Define the Task2((发送任务) 堆栈长度
- OS_STK TaskStk0[TaskStkLengh]; //Define the Task0 stack 定义启动任务堆栈
- OS_STK TaskStk1[TaskStkLengh]; //Define the Task1 stack 定义按键任务堆栈
- OS_STK TaskStk2[TaskStkLengh]; //Define the Task2 stack 定义发送任务堆栈
- void Task0(void *pdata); //Task0 启动任务
- void Task1(void *pdata); //Task1 按键任务
- void Task2(void *pdata); //Task2 发送任务
- uint8 send_buf[80];
- OS_EVENT *Sem_ButtonFlag; //定义按键信号量
- OS_EVENT *Sem_SendFlag; //定义发送信号量
- OS_EVENT *Sem_StartFlag; //定义开始信号量
- /****************************************************************************
- * 名称: UART0_Init
- * 功能: UART0初始化 通讯波特率115200,8位数据位,1位停止位,无奇偶校验
- * 使能TxFIFO,和THRE中断
- * 入口参数: bps 串口波特率
- * 出口参数: 无
- ****************************************************************************/
- void UART0_Init(uint32 bps)
- {
- uint16 Fdiv;
- PINSEL0 = (PINSEL0 & ~(0xf) | 0x05) ; //设置UART0的引脚
- U0LCR = 0x83;
- Fdiv = (Fpclk>>4)/bps;
- U0DLM = Fdiv>>8;
- U0DLL = Fdiv%256;
- U0LCR = 0x03;
- U0FCR = 0x05; // 使能TxFIFO
- U0IER = 0x02; // 使能THRE中断
- }
- /****************************************************************************
- * 名 称: UART0_Exception
- * 功 能: 串口发送中断
- * 入口参数: 无
- * 出口参数: data 发送的数据
- ****************************************************************************/
- void UART0_Exception(void)
- {
- uint32 data;
- OS_ENTER_CRITICAL(); //关中断
- VICVectAddr = 0; //清除中断
- data = U0IIR; //清除中断表示寄存器标志
- OS_EXIT_CRITICAL(); //开中断
- OSSemPost(Sem_SendFlag); //发出发送信号量
- }
- /*********************************************************************************************************
- ** main()函数
- ********************************************************************************************************/
- int main (void)
- {
- OSInit (); //初始化操作系统
- OSTaskCreate (Task0,(void *)0, &TaskStk0[TaskStkLengh - 1], 2); //创建启动任务
- OSStart (); //启动操作系统,开始对任务进行调度管理
- return 0;
- }
- /*********************************************************************************************************
- ** Task0(启动任务)
- ********************************************************************************************************/
- void Task0 (void *pdata)
- {
- pdata = pdata;
- TargetInit (); //硬件初始化
- UART0_Init(115200); //初始化串口
- Sem_ButtonFlag = OSSemCreate(0); //创建按键信号量
- Sem_SendFlag = OSSemCreate(0); //创建发送信号量
- Sem_StartFlag = OSSemCreate(1);
- OSTaskCreate(Task1,(void *)0, &TaskStk1[TaskStkLengh - 1],5); //创建按键任务
- OSTaskCreate(Task2,(void *)0, &TaskStk2[TaskStkLengh - 1],4); //创建发送任务
- OSTaskDel(OS_PRIO_SELF); //删除自己
- }
- /*********************************************************************************************************
- ** Task1(按键任务)
- ********************************************************************************************************/
- void Task1 (void *pdata)
- {
- uint8 i;
- uint8 err;
- pdata = pdata;
- while(1)
- {
- OSSemPend(Sem_StartFlag,0,&err); //等带开始信号量
- for(i = 0;i < 80;i++)
- {
- send_buf[i] = i ; //制造模拟数据。
- }
- while((IO0PIN & KEY ) != 0); //等带按键
- OSSemPost(Sem_ButtonFlag); //发送按键信号量
- }
- }
- /*********************************************************************************************************
- ** Task2(发送任务)
- ********************************************************************************************************/
- void Task2 (void *pdata)
- {
- uint8 i,j,err;
- pdata = pdata;
- while(1)
- {
- OSSemPend(Sem_ButtonFlag,0,&err); //等待按键信号量
- U0IER = U0IER | 0x02; //打开串口发送中断
- for(i = 0;i < 10;i++) //发送10次
- {
- for(j = 0;j < 8;j++) //每次8字节
- {
- U0THR = send_buf[i*8+j];
- }
- OSSemPend(Sem_SendFlag,0,&err); //等待发送信号量
- }
- U0IER = U0IER & ~0x02; //关掉串口中断
- OSSemPost(Sem_StartFlag); //发送开始信号量
- }
- }
- /*********************************************************************************************************
- ** End Of File
- ********************************************************************************************************/