基于S3C2440的嵌入式Linux驱动——MMC/SD子系统解读(一)
在阅读本文之前,请先掌握以下基本知识,不然请略过本文。
预备知识:
熟读LDD3前十章节的内容。
熟悉内核驱动模型(sysfs)和platform总线。
简要了解过SD卡规范。
本文的内容基于如下硬件和软件平台:
目标平台:TQ2440
CPU:s3c2440
内核版本:3.12.5
基于SD规范4.10,即《SD Specifications Part 1 Physical Layer Simplified Specification Version 4.10》。
一、MMC子系统构架
待写。。。
二、主要数据结构
待写。。。
三、MMC子系统初始化
首先看看子系统是如何初始化的,完成哪些工作。
代码位于linux/drivers/mmc/core/core.c。
- static int __init mmc_init(void)
- {
- int ret;
- /* 创建一个工作队列*/
- workqueue = alloc_ordered_workqueue("kmmcd", 0);
- if (!workqueue)
- return -ENOMEM;
- /* 注册mmc总线,总线提供probe方法
- 并直接在内部调用驱动probe方法*/
- ret = mmc_register_bus();
- if (ret)
- goto destroy_workqueue;
- /* 注册名为mmc_host的类*/
- ret = mmc_register_host_class();
- if (ret)
- goto unregister_bus;
- /* 注册sdio总线,总线提供probe方法
- 并直接在内部调用驱动probe方法*/
- ret = sdio_register_bus();
- if (ret)
- goto unregister_host_class;
- return 0;
- unregister_host_class:
- mmc_unregister_host_class();
- unregister_bus:
- mmc_unregister_bus();
- destroy_workqueue:
- destroy_workqueue(workqueue);
- return ret;
- }
代码首先注册了一个工作队列,这个工作队列将用于扫描sd卡设备。我们会在后面进行说明。
工作对类已内核线程的形式运行,可以用ps命令看到名为[kmmcd]的内核线程。
接着注册了两条名为mmc和sdio的总线,以及一个名为mmc_host的类。具体代码如下:
- static struct bus_type mmc_bus_type = {
- .name = "mmc",
- .dev_attrs = mmc_dev_attrs,
- .match = mmc_bus_match,
- .uevent = mmc_bus_uevent,
- .probe = mmc_bus_probe,
- .remove = mmc_bus_remove,
- .shutdown = mmc_bus_shutdown,
- .pm = &mmc_bus_pm_ops,
- };
- int mmc_register_bus(void)
- {
- return bus_register(&mmc_bus_type);
- }
- static struct class mmc_host_class = {
- .name = "mmc_host",
- .dev_release = mmc_host_classdev_release,
- };
- int mmc_register_host_class(void)
- {
- return class_register(&mmc_host_class);
- }
- static struct bus_type sdio_bus_type = {
- .name = "sdio",
- .dev_attrs = sdio_dev_attrs,
- .match = sdio_bus_match,
- .uevent = sdio_bus_uevent,
- .probe = sdio_bus_probe,
- .remove = sdio_bus_remove,
- .pm = SDIO_PM_OPS_PTR,
- };
- int sdio_register_bus(void)
- {
- return bus_register(&sdio_bus_type);
- }
- static struct class mmc_host_class = {
- .name = "mmc_host",
- .dev_release = mmc_host_classdev_release,
- };
- int mmc_register_host_class(void)
- {
- return class_register(&mmc_host_class);
- }
熟悉Linux的设备驱动模型的同学对这些肯定非常熟悉。总线和类的注册只是调用了相应的接口,这些就不再赘述了。
其次,sdio总线不是我们关心的。我们只关心mmc总线。首先来看看mmc总线的match方法:
代码位于linux/drivers/mmc/core/bus.c。
- /*
- * This currently matches any MMC driver to any MMC card - drivers
- * themselves make the decision whether to drive this card in their
- * probe method.
- */
- static int mmc_bus_match(struct device *dev, struct device_driver *drv)
- {
- return 1;
- }
match返回居然直接返回了1。这表示任意的驱动都能和mmc卡设备成功匹配。
从注释中我们也能看出,驱动的probe方法将会决定驱动是否能真正的匹配这个mmc卡设备。
熟悉设备驱动模型的可能知道,随着match返回1表示匹配成功后,将会调用总线提供的probe方法。接着我们来看下mmc总线的probe方法。
代码位于linux/drivers/mmc/core/bus.c。
- static int mmc_bus_probe(struct device *dev)
- {
- struct mmc_driver *drv = to_mmc_driver(dev->driver);
- struct mmc_card *card = mmc_dev_to_card(dev);
- return drv->probe(card);
- }
从上面分析可以看出,子系统初始化代码仅仅注册了两条总线和一个类,并建立了一个工作队列。
四、核心层与控制器层间的接口API
MMC核心层要和SD卡设备进行通信,为了完成这一个工作需要将CMD或者ACMD命令通过MMC/SD控制器发送给SD卡。
那么MMC核心层如何将通信的数据包交给MMC/SD控制器,并让后者去发送呢?
MMC通过函数mmc_wait_for_req完成这个工作,我们来看下这个函数。
4.1 mmc_wait_for_req 函数
下列代码位于linux/drivers/mmc/core/core.c。
- /**
- * mmc_wait_for_req - start a request and wait for completion
- * @host: MMC host to start command
- * @mrq: MMC request to start
- *
- * Start a new MMC custom command request for a host, and wait
- * for the command to complete. Does not attempt to parse the
- * response.
- */
- void mmc_wait_for_req(struct mmc_host *host, struct mmc_request *mrq)
- {
- __mmc_start_req(host, mrq);
- mmc_wait_for_req_done(host, mrq);
- }
- EXPORT_SYMBOL(mmc_wait_for_req);
通过注释可以发现,该函数会 阻塞并等待request的完成。
该函数分两步走,第一步调用__mmc_start_req发送命令,第二部调用 mmc_wait_for_req_done等待命令完成。
分别来看下这两个函数 :
- static int __mmc_start_req(struct mmc_host *host, struct mmc_request *mrq)
- {
- /* 初始化completion,并设置done方法*/
- init_completion(&mrq->completion);
- mrq->done = mmc_wait_done;
- /* 如果mmc已经被拔出,设置错误并返回错误*/
- if (mmc_card_removed(host->card)) {
- mrq->cmd->error = -ENOMEDIUM;
- complete(&mrq->completion);
- return -ENOMEDIUM;
- }
- /* 发送命令 */
- mmc_start_request(host, mrq);
- return 0;
- }
该函数首先初始化了completion并设置了mrq->done方法为mmc_wait_done函数,该函数如下。
- static void mmc_wait_done(struct mmc_request *mrq)
- {
- complete(&mrq->completion);
- }
在第二步mmc_wait_for_req_done中会使用wait_for_completion函数等待mmc控制器完成request,控制器驱动在完成request的发送后,会调用mrq->done方法来激活处于等待中的wait_for_completion函数。
随后函数会首先检查sd卡是否已被拔出,如果卡都被拔出了则没有必要发送request,可以直接调用copletion函数告之相关的等待函数,并设置error值然后返回错误。
- #define mmc_card_removed(c) ((c) && ((c)->state & MMC_CARD_REMOVED))
如果sd卡存在,则调用mmc_start_request函数发送request,该函数如下:
- static void
- mmc_start_request(struct mmc_host *host, struct mmc_request *mrq)
- {
- #ifdef CONFIG_MMC_DEBUG
- unsigned int i, sz;
- struct scatterlist *sg;
- #endif
- if (mrq->sbc) {
- pr_debug("<%s: starting CMD%u arg %08x flags %08x>\n",
- mmc_hostname(host), mrq->sbc->opcode,
- mrq->sbc->arg, mrq->sbc->flags);
- }
- pr_debug("%s: starting CMD%u arg %08x flags %08x\n",
- mmc_hostname(host), mrq->cmd->opcode,
- mrq->cmd->arg, mrq->cmd->flags);
- if (mrq->data) {
- pr_debug("%s: blksz %d blocks %d flags %08x "
- "tsac %d ms nsac %d\n",
- mmc_hostname(host), mrq->data->blksz,
- mrq->data->blocks, mrq->data->flags,
- mrq->data->timeout_ns / 1000000,
- mrq->data->timeout_clks);
- }
- if (mrq->stop) {
- pr_debug("%s: CMD%u arg %08x flags %08x\n",
- mmc_hostname(host), mrq->stop->opcode,
- mrq->stop->arg, mrq->stop->flags);
- }
- WARN_ON(!host->claimed);
- mrq->cmd->error = 0;
- mrq->cmd->mrq = mrq;
- if (mrq->data) {
- BUG_ON(mrq->data->blksz > host->max_blk_size);
- BUG_ON(mrq->data->blocks > host->max_blk_count);
- BUG_ON(mrq->data->blocks * mrq->data->blksz >
- host->max_req_size);
- #ifdef CONFIG_MMC_DEBUG
- sz = 0;
- for_each_sg(mrq->data->sg, sg, mrq->data->sg_len, i)
- sz += sg->length;
- BUG_ON(sz != mrq->data->blocks * mrq->data->blksz);
- #endif
- mrq->cmd->data = mrq->data;
- mrq->data->error = 0;
- mrq->data->mrq = mrq;
- if (mrq->stop) {
- mrq->data->stop = mrq->stop;
- mrq->stop->error = 0;
- mrq->stop->mrq = mrq;
- }
- }
- mmc_host_clk_hold(host);
- led_trigger_event(host->led, LED_FULL);
- /* 发送request*/
- host->ops->request(host, mrq);
- }
mmc_host_clk_hold函数是通过宏CONFIG_MMC_CLKGATE来进行使能的,这个宏默认是不打开的,具体就不分析了,简要说下这个宏的作用。
这个宏的作用是使能时钟门控功能,这个功能在不需要MMC控制器工作的时候,停止MMC控制器,以节省功耗。
随后会调用led_trigger_event触发led事件,这个牵涉到Led子系统,就不进行说明了。
顺便提一句,s3c2440的mmc控制器驱动并没有使用这个led触发功能,也就是说host->led是为空的。
最后调用了mmc控制器驱动提供的request方法发送request。
这里需要注意下函数指针的形参:一个为host表示mmc控制器,一个为mrq表示request(请求)。
很显然,要求host指向的mmc控制器发送mrq指向的请求,同时,也可以看出所有传递到mmc控制器驱动的请求都是使用struct mmc_request结构体进行封装的。
至此,第一步完成,接着我们来看第二步:
- static void mmc_wait_for_req_done(struct mmc_host *host,
- struct mmc_request *mrq)
- {
- struct mmc_command *cmd;
- while (1) {
- wait_for_completion(&mrq->completion);
- cmd = mrq->cmd;
- /*
- * If host has timed out waiting for the sanitize
- * to complete, card might be still in programming state
- * so let's try to bring the card out of programming
- * state.
- */
- if (cmd->sanitize_busy && cmd->error == -ETIMEDOUT) {
- if (!mmc_interrupt_hpi(host->card)) {
- pr_warning("%s: %s: Interrupted sanitize\n",
- mmc_hostname(host), __func__);
- cmd->error = 0;
- break;
- } else {
- pr_err("%s: %s: Failed to interrupt sanitize\n",
- mmc_hostname(host), __func__);
- }
- }
- if (!cmd->error || !cmd->retries ||
- mmc_card_removed(host->card))
- break;
- pr_debug("%s: req failed (CMD%u): %d, retrying...\n",
- mmc_hostname(host), cmd->opcode, cmd->error);
- cmd->retries--;
- cmd->error = 0;
- /* 没有成功,尝试再次发送request*/
- host->ops->request(host, mrq);
- }
- }
被唤醒后会执行一系列检查,如果request成功发送,则会break,并直接返回。
如果没有发送成功,只要retries非0,则会尝试再次调用mmc控制器驱动的request方法再次发送。
4.2 CMD和ACMD发送函数
通过4.1小结,我们知道MMC核心层如何将request交给MMC控制器驱动,并由后者发送该request给sd卡。
通过SD卡规范,我们知道有两种形式的命令,一种为CMD,而另一种为ACMD。
MMC子系统提供了两个函数来完成这两命令的发送,分别是mmc_wait_for_cmd和mmc_wait_for_app_cmd。
先来看下CMD的发送函数:
下列代码位于linux/drivers/mmc/core/core.c。
- /**
- * mmc_wait_for_cmd - start a command and wait for completion
- * @host: MMC host to start command
- * @cmd: MMC command to start
- * @retries: maximum number of retries
- *
- * Start a new MMC command for a host, and wait for the command
- * to complete. Return any error that occurred while the command
- * was executing. Do not attempt to parse the response.
- */
- int mmc_wait_for_cmd(struct mmc_host *host, struct mmc_command *cmd, int retries)
- {
- struct mmc_request mrq = {NULL};
- WARN_ON(!host->claimed);
- /* 清空应答 */
- memset(cmd->resp, 0, sizeof(cmd->resp));
- cmd->retries = retries;
- /* 保存命令*/
- mrq.cmd = cmd;
- cmd->data = NULL;
- /* 发送命令并等待response */
- mmc_wait_for_req(host, &mrq);
- return cmd->error;
- }
该函数首先清空命令的应答数据(resp),并保存命令(cmd)到mrq中,随后调用4.1小节中的mmc_wait_for_req函数发送CMD。
从这个函数的形参我们可以看出:所有需要发送的CMD都由mmc_command进行封装,在函数内部被mmc_request
结构体进行再次封装,并将mmc_request交给MMC控制器驱动完成CMD的发送。
接着看下ACMD命令的发送函数mmc_wait_for_app_cmd:
下列代码位于Linux/drivers/mmc/core/sd_ops.h。
- /**
- * mmc_wait_for_app_cmd - start an application command and wait for
- completion
- * @host: MMC host to start command
- * @card: Card to send MMC_APP_CMD to
- * @cmd: MMC command to start
- * @retries: maximum number of retries
- *
- * Sends a MMC_APP_CMD, checks the card response, sends the command
- * in the parameter and waits for it to complete. Return any error
- * that occurred while the command was executing. Do not attempt to
- * parse the response.
- */
- int mmc_wait_for_app_cmd(struct mmc_host *host, struct mmc_card *card,
- struct mmc_command *cmd, int retries)
- {
- struct mmc_request mrq = {NULL};
- int i, err;
- BUG_ON(!cmd);
- BUG_ON(retries < 0);
- err = -EIO;
- /*
- * We have to resend MMC_APP_CMD for each attempt so
- * we cannot use the retries field in mmc_command.
- */
- for (i = 0;i <= retries;i++) {
- /* 发送CMD55*/
- err = mmc_app_cmd(host, card);
- if (err) {
- /* no point in retrying; no APP commands allowed */
- if (mmc_host_is_spi(host)) {
- if (cmd->resp[0] & R1_SPI_ILLEGAL_COMMAND)
- break;
- }
- continue;
- }
- memset(&mrq, 0, sizeof(struct mmc_request));
- memset(cmd->resp, 0, sizeof(cmd->resp));
- cmd->retries = 0;
- mrq.cmd = cmd;
- cmd->data = NULL;
- /* 发送ACMDx*/
- mmc_wait_for_req(host, &mrq);
- err = cmd->error;
- /* 发送成功,直接break并返回*/
- if (!cmd->error)
- break;
- /* no point in retrying illegal APP commands */
- if (mmc_host_is_spi(host)) {
- if (cmd->resp[0] & R1_SPI_ILLEGAL_COMMAND)
- break;
- }
- }
- return err;
- }
- EXPORT_SYMBOL(mmc_wait_for_app_cmd);
根据SD卡规范的要求:在发送ACMD命令只前,需要发送CMD55,以表示后面一个命令为AMD命令。
所以,该函数首先调用mmc_app_cmd函数来发送CMD55命令,我们来看下这个函数:
- int mmc_app_cmd(struct mmc_host *host, struct mmc_card *card)
- {
- int err;
- struct mmc_command cmd = {0};
- BUG_ON(!host);
- BUG_ON(card && (card->host != host));
- cmd.opcode = MMC_APP_CMD; /* CMD55 */
- if (card) {
- cmd.arg = card->rca << 16; /* 卡地址*/
- cmd.flags = MMC_RSP_SPI_R1 | MMC_RSP_R1 | MMC_CMD_AC;
- } else {
- cmd.arg = 0; /* 卡地址*/
- cmd.flags = MMC_RSP_SPI_R1 | MMC_RSP_R1 | MMC_CMD_BCR;
- }
- /* 发送cmd并等待(阻塞方式)*/
- err = mmc_wait_for_cmd(host, &cmd, 0);
- if (err)
- return err;
- /* Check that card supported application commands */
- /* 检查card status第5位,判断SD卡是否支持ACMD*/
- if (!mmc_host_is_spi(host) && !(cmd.resp[0] & R1_APP_CMD))
- return -EOPNOTSUPP;
- return 0;
- }
- EXPORT_SYMBOL_GPL(mmc_app_cmd);

从上述命令说明中,我们可以看出:
1)该命令为ac类型命令,也就是点对点命令,并且在DAT信号线上没有数据传输。
3)最后,命令的应答数据格式为R1。
回到函数中。
cmd.arg为发送命令的参数,函数首先设置了命令的参数为sd卡地址(RCA),这符合上面的描述。
随后调用了之前分析的mmc_wait_for_cmd函数发送CMD55命令。
上面提到CMD55命令的响应为R1,其格式如下:
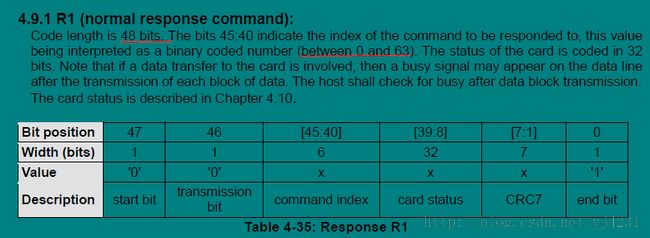
其中32bit的card status作为响应数据被保存在resp数组中。
card status的具体位定义请查看SD规范的4.10.1小结。
最后检查CMD55的响应来判断SD卡是否支持ACMD命令。
CMD55发送成功后,返回到mmc_wait_for_app_cmd函数中。
接着,cmd被保存到mrq.cmd 中,并调用mmc_wait_for_req中发送ACMD命令。
五、小结
本问主要对MMC子系统架构进行了简单的介绍,并给出了一些关键数据结构。同时,对MMC子系统的初始化过程进行了简单分析,最后,重点介绍了CMD和ACMD命令的发送函数。