ORB-SLAM2的地图保存
“女生不适合弄硬件”,这句话真的深有体会,今天为了让Pioneer 3-AT给Kinect供电,真的是路途坎坷.首先机器人尘封很久,螺丝都是拧死的,LZ拿着螺丝头去拧,发现螺丝纹丝不动,好吧!需要师兄的协助.找到供电板的12V电源接口,因为操作问题…导致保险丝熔断,LZ的心情啊…默默的买了对应的保险丝,心里想着还是乖乖写代码吧…
回归正题,如文章题目所示,如何保存ORB-SLAM的地图?
如何保存地图?肯定是要先明白在ORB-SLAM中的地图到底有哪些变量?
在之前源码分析和一些跑ORB-SLAM的的显示图像,我们可以看到
地图主要可见的有关键帧(包括相机的pose,相机的内参,ORB特征),3D的地图点( 空间中3D位置,法线方向,ORB的描述子),词袋向量,共视图等.可以看到如果要保存地图点,保存的数据还是相当大的,下面我们就按照http://www.cnblogs.com/mafuqiang/p/6972342.html这个博客的步骤一点点来实现地图的保存操作.
首先要明确一点的是一般SLAM对地图维护的操作均在Map.cc这个函数类中,最终按照博客的想法是把最终的地图保存成二进制的文件(filename.bin)这种类型,如果是大神请绕道,讲的有些确实很基础。
所以,首先要在Map.h中声明几个函数,因为后续添加了Converter.h中的类别,在Map.h的头文件中要添加Converter.h.
public:
void Save( const string &filename );
protected:
void SaveMapPoint( ofstream &f, MapPoint* mp );
void SaveKeyFrame( ofstream &f, KeyFrame* kf );下面是关于Save函数的构成:
void Map::Save ( const string& filename )
{
//输出地图保存的信息
cerr<<"Map Saving to "<//输出地图点的数目
cerr << "The number of MapPoints is :"<//地图点的数目
unsigned long int nMapPoints = mspMapPoints.size();
f.write((char*)&nMapPoints, sizeof(nMapPoints) );
//依次保存MapPoints
for ( auto mp: mspMapPoints )
//调用SaveMapPoint函数
SaveMapPoint( f, mp );
//获取每一个MapPoints的索引值,即从0开始计数,初始化了mmpnMapPointsIdx
GetMapPointsIdx();
//输出关键帧的数量
cerr <<"The number of KeyFrames:"<//关键帧的数目
unsigned long int nKeyFrames = mspKeyFrames.size();
f.write((char*)&nKeyFrames, sizeof(nKeyFrames));
//依次保存关键帧KeyFrames
for ( auto kf: mspKeyFrames )
SaveKeyFrame( f, kf );
for (auto kf:mspKeyFrames )
{
//获得当前关键帧的父节点,并保存父节点的ID
KeyFrame* parent = kf->GetParent();
unsigned long int parent_id = ULONG_MAX;
if ( parent )
parent_id = parent->mnId;
f.write((char*)&parent_id, sizeof(parent_id));
//获得当前关键帧的关联关键帧的大小,并依次保存每一个关联关键帧的ID和weight;
unsigned long int nb_con = kf->GetConnectedKeyFrames().size();
f.write((char*)&nb_con, sizeof(nb_con));
for ( auto ckf: kf->GetConnectedKeyFrames())
{
int weight = kf->GetWeight(ckf);
f.write((char*)&ckf->mnId, sizeof(ckf->mnId));
f.write((char*)&weight, sizeof(weight));
}
}
f.close();
cerr<<"Map Saving Finished!"< 可以看到,Save函数依次保存了地图点的数目、所有的地图点、关键帧的数目、所有关键帧、关键帧的生长树节点和关联关系;
下面是SaveMapPoint函数的构成:
void Map::SaveMapPoint( ofstream& f, MapPoint* mp)
{
//保存当前MapPoint的ID和世界坐标值,x,y z
f.write((char*)&mp->mnId, sizeof(mp->mnId));
cv::Mat mpWorldPos = mp->GetWorldPos();
f.write((char*)& mpWorldPos.at<float>(0),sizeof(float));
f.write((char*)& mpWorldPos.at<float>(1),sizeof(float));
f.write((char*)& mpWorldPos.at<float>(2),sizeof(float));
}其实主要就是通过MapPoint类的GetWorldPos()函数获取了地图点的坐标值并保存下来;
下面是SaveKeyFrame函数的构成:
void Map::SaveKeyFrame( ofstream &f, KeyFrame* kf )
{
//保存当前关键帧的ID和时间戳
f.write((char*)&kf->mnId, sizeof(kf->mnId));
f.write((char*)&kf->mTimeStamp, sizeof(kf->mTimeStamp));
//保存当前关键帧的位姿矩阵
cv::Mat Tcw = kf->GetPose();
//通过四元数保存旋转矩阵
std::vector<float> Quat = Converter::toQuaternion(Tcw);
for ( int i = 0; i < 4; i ++ )
f.write((char*)&Quat[i],sizeof(float));
//保存平移矩阵
for ( int i = 0; i < 3; i ++ )
f.write((char*)&Tcw.at<float>(i,3),sizeof(float));
//直接保存旋转矩阵
// for ( int i = 0; i < Tcw.rows; i ++ )
// {
// for ( int j = 0; j < Tcw.cols; j ++ )
// {
// f.write((char*)&Tcw.at(i,j), sizeof(float));
// //cerr<<"Tcw.at("<(i,j)<
// }
// }
//保存当前关键帧包含的ORB特征数目
//cerr<<"kf->N:"<N<
f.write((char*)&kf->N, sizeof(kf->N));
//保存每一个ORB特征点
for( int i = 0; i < kf->N; i ++ )
{
cv::KeyPoint kp = kf->mvKeys[i];
f.write((char*)&kp.pt.x, sizeof(kp.pt.x));
f.write((char*)&kp.pt.y, sizeof(kp.pt.y));
f.write((char*)&kp.size, sizeof(kp.size));
f.write((char*)&kp.angle,sizeof(kp.angle));
f.write((char*)&kp.response, sizeof(kp.response));
f.write((char*)&kp.octave, sizeof(kp.octave));
//保存当前特征点的描述符
for (int j = 0; j < kf->mDescriptors.cols; j ++ )
f.write((char*)&kf->mDescriptors.at<unsigned char>(i,j), sizeof(char));
//保存当前ORB特征对应的MapPoints的索引值
unsigned long int mnIdx;
MapPoint* mp = kf->GetMapPoint(i);
if (mp == NULL )
mnIdx = ULONG_MAX;
else
mnIdx = mmpnMapPointsIdx[mp];
f.write((char*)&mnIdx, sizeof(mnIdx));
}
} 保存关键帧的函数稍微复杂一点,首先需要明白一幅关键帧包含特征点,描述符,以及哪些特征点通过三角化成为了地图点。
其中在Save函数中的GetMapPointsIdx函数的构成为,它的作用是初始化成员变量,在Map.h中添加成员变量:
protected:
std::mapunsigned long int> mmpnMapPointsIdx;
void GetMapPointsIdx();
这个成员变量存储的是特征点对应的地图点的索引值。
void Map::GetMapPointsIdx()
{
unique_lock lock(mMutexMap);
unsigned long int i = 0;
for ( auto mp: mspMapPoints )
{
mmpnMapPointsIdx[mp] = i;
i += 1;
}
} 另外,关于旋转矩阵的存储可以通过四元数或矩阵的形式存储,如果使用四元数需要自定义一个矩阵和四元数相互转换的函数,在Converter.cc类里面ORB_SLAM2已经定义好了,所以直接使用就行了。
在Converter.h里面加上如下函数定义
static cv::Mat toCvMat( const std::vector<float>& v );
在Converter.cc中加入
cv::Mat Converter::toCvMat( const std::vector<float>& v )
{
Eigen::Quaterniond q;
q.x() = v[0];
q.y() = v[1];
q.z() = v[2];
q.w() = v[3];
Eigen::Matrix<double,3,3>eigMat(q);
cv::Mat M = toCvMat(eigMat);
return M;
}在system.h和system.cc中分别添加声明和定义:
void SaveMap(const string &filename);
void System::SaveMap(const string &filename)
{
mpMap->Save(filename);
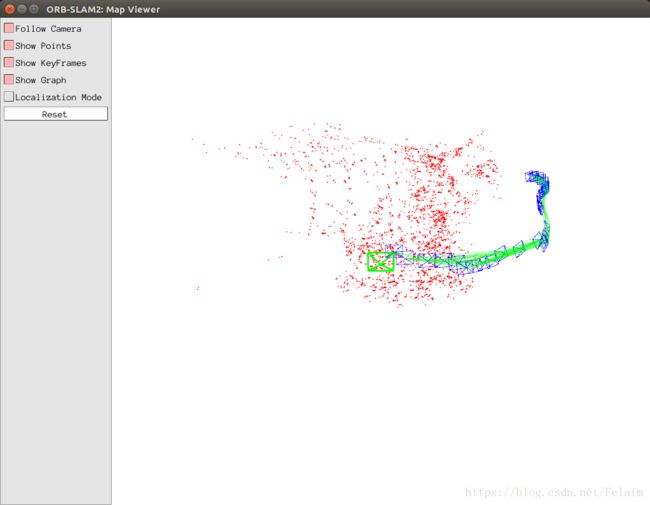
} 以上就是地图保存的代码,LZ在ros下和rgbd的example下都经过测试,代码是可以保存的,最后再rgbd_tum.cc中加入
SLAM.SaveMap("MapPointandKeyFrame.bin")在运行的路径下就会有存有地图的二进制文件了。哈哈,运行结果如下图所示O(∩_∩)O哈哈~