Opencv图像预处理
gamma校正(基于OpenCV)
2017年10月25日 18:39:10 guoyunfei20 阅读数:802
Gamma校正是对输入图像灰度值进行的非线性操作,使输出图像灰度值与输入图像灰度值呈指数关系。
指数γ即为Gamma
经过Gamma校正后的输入和输出图像灰度值关系如下图所示:
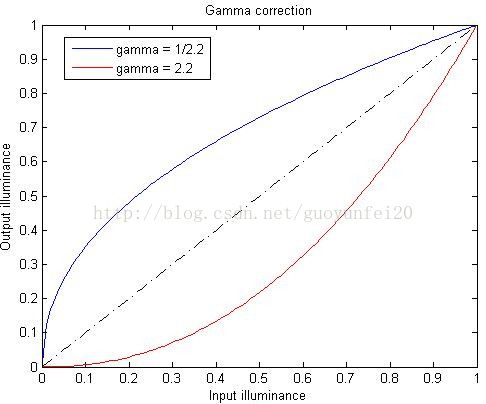
横坐标是输入灰度值,纵坐标是输出灰度值,蓝色曲线是gamma值小于1时的输入输出关系,红色曲线是gamma值大于1时的输入输出关系。
可以观察到,当gamma值小于1时(蓝色曲线),图像的整体亮度值得到提升,同时低灰度处的对比度增加,高灰度处的对比度降低,更利于分辩低灰度值时的图像细节;
当gamma值大于1时(红色曲线),图像的整体亮度值得到减小,同时低灰度处的对比度降低,高灰度处的对比度增加,更利于分辩高灰度值时的图像细节。
函数实现(亲测通过):
/************************************************
* gamma correction
* template<...> _Tpsaturate_cast(_Tp2v): Template function for
* accurate conversion from one primitive type to another
*/
void GammaCorrection(Mat& src, Mat& dst, float fGamma)
{
// build look up table
unsigned char lut[256];
for( int i = 0; i < 256; i++ ) {
lut[i] = saturate_cast
}
dst = src.clone();
const int channels = dst.channels();
switch(channels)
{
case 1: {
MatIterator_
for( it = dst.begin
*it = lut[(*it)];
break;
}
case 3: {
MatIterator_
for( it = dst.begin
(*it)[0] = lut[((*it)[0])];
(*it)[1] = lut[((*it)[1])];
(*it)[2] = lut[((*it)[2])];
}
break;
}
}
}
Demo
void demo()
{
cv::Mat src = cv::imread("./3.jpg");
cv::Mat dst;
GammaCorrection(src, dst, 0.45);
cv::namedWindow("win1");
cv::imshow("win1", src);
cv::namedWindow("win2");
cv::imshow("win2", dst);
cv::waitKey(0);
}
图像的峰值信噪比(peak signal to noise ratio, PSNR)
2017年10月20日 18:51:30 guoyunfei20 阅读数:4303
峰值信噪比(PSNR)是一个表示信号最大可能功率和影响它的表示精度的破坏性噪声功率的比值的工程术语。由于许多信号都有非常宽的动态范围,峰值信噪比常用对数分贝单位来表示。
在图像处理中,要对图像进行客观的评价,常常需要计算PSNR。PSNR是衡量图像失真或是噪声水平的客观标准。2个图像之间PSNR值越大,则越相似。普遍基准为30dB,30dB以下的图像劣化较为明显。
PSNR定义:

其中,MAX表示图像颜色的最大数值,8bit图像最大取值为255。MSE为均方差,定义为:

其中,I和K分辨是原始图像和处理后的图像,m*n为量图像的大小。
/********************************************
* 输入格式是cv::Mat类型,I1,I2代表是输入的两幅图像
*/
double getPSNR(const Mat& I1, const Mat& I2)
{
Mat s1;
absdiff(I1, I2, s1); // |I1 - I2|AbsDiff函数是 OpenCV 中计算两个数组差的绝对值的函数
s1.convertTo(s1, CV_32F); // 这里我们使用的CV_32F来计算,因为8位无符号char是不能进行平方计算
s1 = s1.mul(s1); // |I1 - I2|^2
Scalar s = sum(s1); // 对每一个通道进行加和
double sse = s.val[0] + s.val[1] + s.val[2]; // sum channels
if(sse <= 1e-10) // 对于非常小的值我们将约等于0
return 0;
else {
double mse =sse /(double)(I1.channels() * I1.total()); // MSE
double psnr = 10.0*log10((255*255)/mse);
return psnr;
}
}