2.2 视见转换
1.由世界空间转换到相机空间。
2.相机由3参数定义(EYE,AT,UP)
3.EYE:相机在世界空间中的位置;AT:相机场景中所指向的参考点(通常位于场景中间位置);UP:指向相机上方的向量(多数时候为y轴)
4.利用视见参数构造视见空间坐标(u,v,n):
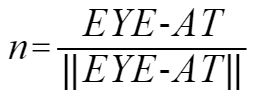
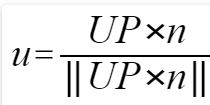
![]()
5.世界空间标记(0,e1,e2,e3) ; 相机空间标记(EYE,u,v,n)
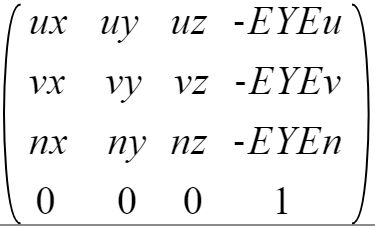
6.将世界空间转换为相机空间:<1>将EYE移动至0处,<2>执行旋转操作,将(u,v,n)转换为(e1,e2,e3) 可将两者操作结合为视见矩阵
7.视见矩阵:
2.3逐顶点光照
1.光照将在各个顶点处进行计算。
2.光源定义于世界空间内——>现在一般采用逐片元光照
3.场景中的可见区域成为视见体,视见体可视为一个无限的金字塔。 包含四个参数(fovy,aspect,n,f) (后补图)
4.ascept(视见体宽高比)=w/n ; fovy:定义了垂直方向上的可见区域 ; n:为原点与近剪裁面的距离 ; f:为原点与远剪裁面的距离
5.通过平面n和f截取的为视锥体,视锥体掌握了相机的内部结构。视椎体中的部分才进入GPU——视椎体测试
6.进入视椎体的部分才进行剪裁操作进入到剪裁空间。
2.4.2 投影矩阵
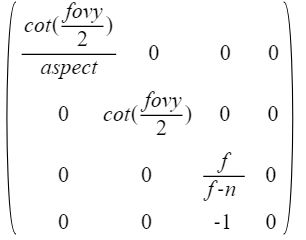
1.透视投影:将视椎体由圆台转化为长方形(利用投影矩阵),投影线由原本一点出发呈发射状转化为平行线。特征:近大远小(远处的物体被缩小,远处大的物体被投影之后和近处相比可能还偏小【远近指距离投影中心(cop)的距离】)
2.投影矩阵:
3.经过投影转化的对象定义于右手剪裁空间,在顶点处理阶段可视为最后一步操作。