从YOLOv1谈到YOLOv2(3)二代的准确度改进(上)
现在开始说说在yolo之后的第二代版本,这个第二代在第一代的基础上做了很多的优化。原来的版本在准确度,速度,容错率上都有所欠缺。下面来说说为了在这方面有所提高作者采用了那些方法。这一篇先说准确度。
一、更精确(Better)
1、Batch Normalization(批正则化)
首先先了解一下神经网络中的归一化,通常在神经网络训练开始前,都要对输入数据做一个归一化处理,那么具体为什么需要归一化呢?归一化后有什么好处呢?原因在于神经网络学习过程本质就是为了学习数据分布,一旦训练数据与测试数据的分布不同,那么网络的泛化能力也大大降低;另外一方面,一旦每批训练数据的分布各不相同(batch 梯度下降),那么网络就要在每次迭代都去学习适应不同的分布,这样将会大大降低网络的训练速度,这也正是为什么我们需要对数据都要做一个归一化预处理的原因。对于深度网络的训练是一个复杂的过程,只要网络的前面几层发生微小的改变,那么后面几层就会被累积放大下去。一旦网络某一层的输入数据的分布发生改变,那么这一层网络就需要去适应学习这个新的数据分布,所以如果训练过程中,训练数据的分布一直在发生变化,那么将会影响网络的训练速度。我们一般会对输入数据进行”白化“除理,使得它的均值是0,方差是1。但是之后的层就很难保证了,因为随着前面层参数的调整,后面的层的输入是很难保证的。比较坏的情况是,比如最后一层,经过一个minibatch,把参数调整好的比之前好一些了,但是它之前的所有层的参数也都变了,从而导致下一轮训练的时候输入的范围都发生变化了,那么它肯定就很难正确的分类了。
(什么是mini-batch?)批梯度下降每一轮迭代需要所有样本参与,对于大规模的机器学习应用,经常有billion级别的训练集,计算复杂度非常高。因此,有学者就提出,反正训练集只是数据分布的一个采样集合,我们能不能在每次迭代只利用部分训练集样本呢?这就是mini-batch算法。假设训练集有m个样本,每个mini-batch(训练集的一个子集)有b个样本,那么,整个训练集可以分成m/b个mini-batch
那是什么是Batch Normalization呢,说白了就是对神经网络的每一个卷积层输出结果进行一下归一化,而不是在池化与激活函数之后。但是这样也带来一个问题,把某个层的输出限制在均值为0方差为1的分布会使得网络的表达能力变弱。因此作者又给batch normalization层进行一些限制的放松,给它增加两个可学习的参数 β 和 γ ,对数据进行缩放和平移,平移参数 β 和缩放参数 γ 是学习出来的。极端的情况这两个参数等于mini-batch的均值和方差,那么经过batch normalization之后的数据和输入完全一样,当然一般的情况是不同的。
文中使用了类似z-score的归一化方式:每一维度减去自身均值,再除以自身标准差,由于使用的是随机梯度下降法,这些均值和方差也只能在当前迭代的batch中计算,故作者给这个算法命名为Batch Normalization。算法如下

这里有一点需要注意,像卷积层这样具有权值共享的层,Wx+b的均值和方差是对整张map求得的,在batch_size * channel * height * width这么大的一层中,对总共batch_size*height*width个像素点统计得到一个均值和一个标准差,共得到channel组参数。
也就是说把每个channel看出一批数据,然后就可以调用全连接层的batch normalization 算法了。
2、High Resolution Classifier
所有state-of-the-art的检测方法基本上都会使用ImageNet预训练过的模型(classifier)来提取特征,例如AlexNet输入图片会被resize到不足256 * 256,这导致分辨率不够高,给检测带来困难。所以YOLO(v1)先以分辨率224*224训练分类网络,然后需要增加分辨率到448*448,这样做不仅切换为检测算法也改变了分辨率。所以作者想能不能在预训练的时候就把分辨率提高了,训练的时候只是由分类算法切换为检测算法。
YOLOv2首先修改预训练分类网络的分辨率为448*448,在ImageNet数据集上训练10轮(10 epochs)。这个过程让网络有足够的时间调整filter去适应高分辨率的输入。然后fine tune为检测网络。mAP获得了4%的提升。
3、Convolutional With Anchor Boxes(使用预设框)
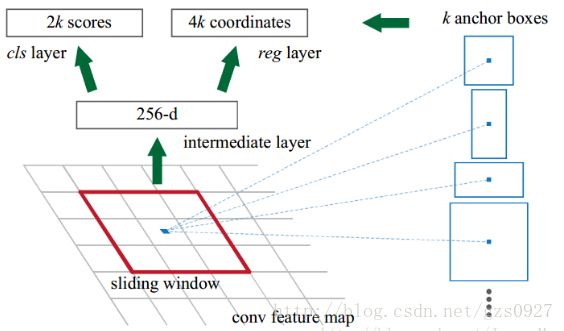
YOLO(v1)使用全连接层数据进行bounding box预测(要把1470*1的全链接层reshape为7*7*30的最终特征),这会丢失较多的空间信息定位不准。YOLOv2借鉴了Faster R-CNN中的anchor思想: 简单理解为卷积特征图上进行滑窗采样,每个中心预测9种不同大小和比例的框。由于都是卷积不需要reshape,很好的保留的空间信息,最终特征图的每个特征点和原图的每个cell一一对应。而且用预测相对偏移(offset)取代直接预测坐标简化了问题,方便网络学习。
总的来说就是移除全连接层(以获得更多空间信息)使用 anchor boxes 取预测 bounding boxes。具体做法如下:
· 去掉最后的池化层确保输出的卷积特征图有更高的分辨率。
· 缩减网络,让图片输入分辨率为416 * 416,目的是让后面产生的卷积特征图宽高都为奇数,这样就可以产生一个center cell。因为作者观察到,大物体通常占据了图像的中间位置,可以只用一个中心的cell来预测这些物体的位置,否则就要用中间的4个cell来进行预测,这个技巧可稍稍提升效率。
· 使用卷积层降采样(factor 为32),使得输入卷积网络的416 * 416图片最终得到13 * 13的卷积特征图(416/32=13)。
· 把预测类别的机制从空间位置(cell)中解耦,由anchor box同时预测类别和坐标。因为YOLO是由每个cell来负责预测类别,每个cell对应的2个bounding box 负责预测坐标(回想YOLO中 最后输出7*7*30的特征,每个cell对应1*1*30,前10个主要是2个bounding box用来预测坐标,后20个表示该cell在假设包含物体的条件下属于20个类别的概率) 。YOLOv2中,不再让类别的预测与每个cell(空间位置)绑定一起,而是让全部放到anchor box中。
这里额外解释一下,之前在卷积神经网络之后呢,通过全链接输出一个与cell相对应的特征,之这里在卷积层的特征点图出来之后,给每个特征点赋予k个预选框(之前RCNN里面预选框的大小是手动选择的,这里的方法后面会说),之后再对候选框中进一步处理大小与位置等。
加入了anchor boxes后,可以预料到的结果是召回率上升,准确率下降。我们来计算一下,假设每个cell预测9个建议框,那么总共会预测13 * 13 * 9 = 1521个boxes,而之前的网络仅仅预测7 * 7 * 2 = 98个boxes。具体数据为:没有anchor boxes,模型recall为81%,mAP为69.5%;加入anchor boxes,模型recall为88%,mAP为69.2%。这样看来,准确率只有小幅度的下降,而召回率则提升了7%,说明可以通过进一步的工作来加强准确率,的确有改进空间。
4、Dimension Clusters(维度聚类)
使用anchor时,作者发现Faster-RCNN中anchor boxes的个数和宽高维度往往是手动精选的先验框(hand-picked priors),设想能否一开始就选择了更好的、更有代表性的先验boxes维度,那么网络就应该更容易学到准确的预测位置。解决办法就是统计学习中的K-means聚类方法,通过对数据集中的ground true box做聚类,找到ground true box的统计规律。以聚类个数k为anchor boxs个数,以k个聚类中心box的宽高维度为anchor box的维度。
如果按照标准k-means使用欧式距离函数,大boxes比小boxes产生更多error。但是,我们真正想要的是产生好的IOU得分的boxes(与box的大小无关)。因此采用了如下距离度量:
d(box,centroid) = 1-IOU(box,centroid)

上面左图: 随着k的增大,IOU也在增大(高召回率),但是复杂度也在增加。所以平衡复杂度和IOU之后,最终得到k值为5。上面右图:5聚类的中心与手动精选的boxes是完全不同的,扁长的框较少瘦高的框较多(这就是统计规律的力量)。
后面的部分在下一part再说吧