三维重建学习(二)相机的标定(上)
前言
这一篇主要补充一些关于三维重建的数学理论和模型,因为想理解相机的标定需要有一定的理论基础。相机标定的具体方法以及数学表达在下一篇具体讲解。
Homogeneous Coordinate 齐次坐标
齐次坐标与我们一般使用的笛卡尔坐标(下文统一用非齐次坐标代称)有一个本质的区别,就是齐次坐标多了一个component,具体来说,在三维世界中,非齐次坐标用(x, y, z)来刻画一个点的位置。而齐次坐标则是(x, y, z, 1)或者更一般化的(x, y, z, w)。
显然最大的疑惑是为什么要引入齐次坐标?或者说用齐次坐标刻画三维世界有什么独特的好处?齐次坐标最大的特点叫做
“Invariant to scaling”.简单来说,齐次坐标对于乘以或者除去一个常量的运算可以保持不变。为什么是这样?这个问题我先不回答,接下来讲完齐次坐标与非齐次坐标的转换后,答案自然就明了了。
Inhomogeneous to Homogeneous
将一个点从非齐次坐标转换成齐次坐标很简单,而且是绝对的。
例如点 (x, y, z, w) ,首先要将其最后一个量化成1,即(x/w, y/w, z/w, 1),然后取前三个量即可得到对应的齐次坐标。从这就很容易理解,为什么非齐次坐标乘以一个标量后,并没有实际意义,因为其实际对应的齐次坐标点并没有发生改变。
Homogeneous to Inhomogeneous
把一个点从齐次坐标转换到非齐次坐标中,默认到方法就是在原坐标中再加一个1,即 (x, y, z) 变成了 (x, y, z, 1)。但事实是这不是一个单一解的绝对过程,从上面的转换也可以看出,非齐次坐标中的一个点对应齐次坐标中的唯一一个点,但是反之却并不唯一。点(x,y,z)可以对应由任何实数w构成的点(wx,wy,wz,w)。
Camera Model 相机模型
Pinhole Camera Model 小孔成像
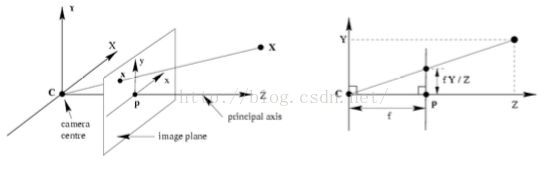
根据相似三角形,可以表达出空间中的点X与原点C的连线最终交与投影平面的点的3D坐标
想拿到这个3D点在2D平面上的坐标,只要把Z轴的量舍去即可
Intrinsic Matrix 内部矩阵
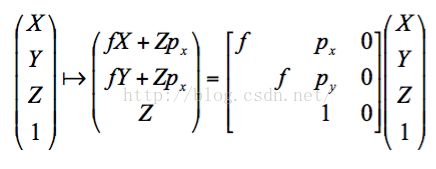
以上便是在非齐次坐标中3D点与其对应的2D点的坐标,但是实际的表达是要用齐次坐标来完成,所以要将两个点都化为齐次坐标
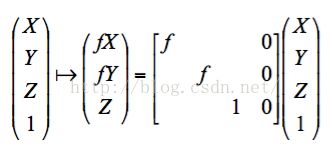
将这个运算用矩阵表达,很容易能得到上图的矩阵,这个矩阵便是Camera Matrix(相机矩阵),通常用字母P来表示。但这个形式不是我们常用的表达形式,还可以对其做进一步的分解
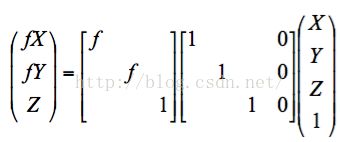
最后得到的这个矩阵由两部分组成,左边3x3的矩阵叫做Intrinsic Matrix,用字母K表示,主要包含相机的内部信息,比如f便是焦距,这些信息是给定的相机后就确定的,不依赖于外界环境的。右边3x4的矩阵叫做Extrinsic Matrix,主要包含的是外部信息,是独立于相机本身参数的。这个矩阵主要由两部分组成,即Rotational Matrix(旋转矩阵)和Translational Vector(平移向量),下图的表示方法更清晰一些
这里的单位矩阵I代表的便是旋转矩阵,用R表示,而零向量0则表示平移向量,用t表示。一组R和t的参数共同构成了相机的Relative Pose(相对位置),这个概念先提出来,以后再解释。不难发现这里R=I,而t=0,代表的是一个参考,因为只有一个相机,相对于它本身而言显然是不需要旋转和平移的。
Projective Camera Model 投影相机
这个模型是基于小孔成像模型的,在其基础上增加了Pricipal Point(主点)的概念。投影平面与Pricipal Axis(主轴)的交点并不一定就是投影平面的原点,所以Principal Point的坐标并不一定是(0,0),这里用一个列向量
p 来表示其坐标
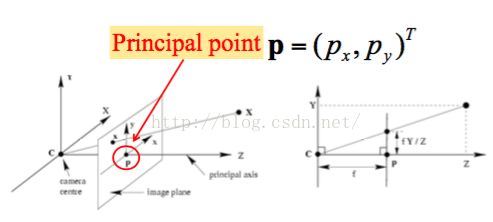
有了这一改变后,对应的相机矩阵也会有所变化
显然,其对应的x和y坐标在小孔成像模型中是0,所以小孔成像模型中的Intrinsic Matrix是一个Diagonal Matrix(对角矩阵),但是一般化的模型中,应该是一个Upper Triangular Matrix(上三角矩阵)。
CCD Camera Model 以CCD为传感器的相机
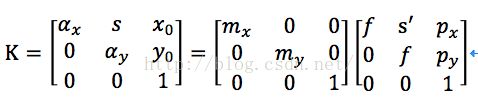
若是考虑传感器的因素,可以发现,传感器在横向与纵向的单位像素长度并不一定相等,所以以上所有模型在考虑到相机的内部结构时,都要乘一个单位像素长度,用m来表示。这样的结果就是Intrinsic Matrix即矩阵K会发生一些微小的变化
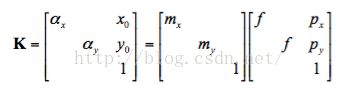
除此之外,矩阵K还有另一个参数,叫做Skew Factor,用字母s表示,但但多数情况都为零,在此不赘述
Extrinsic Matrix 外部矩阵
以上都是关于Intrinsic Matrix,接下来是关于Extrinsic Matrix的信息,当涉及Extrinsic Matrix的时候,就要涉及到两个不同的相机矩阵
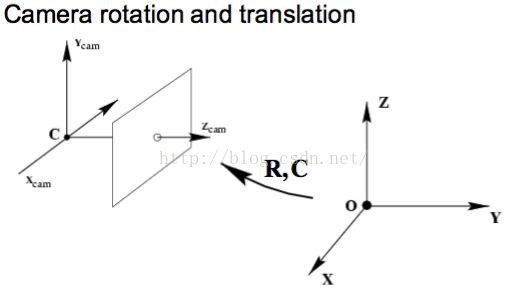
从这个图中大致可以看出两个不同的相机位置之间的关系
首先提一下空间中的旋转,这可以理解为分别绕x,y,z轴旋转角度a,b,c
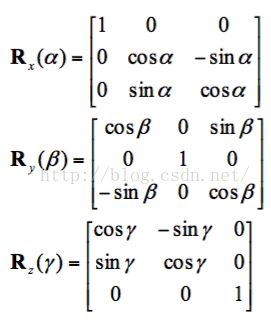
最终的矩阵R可以表示为这三个矩阵的乘积
回归正题,以上图为例,若取左上角的相机作为参考,那么它对应的Extrinsic Matrix 便是很简单的[ I|0 ],问题在于如何拿到位于右下角这个相机对应的外部矩阵。可以这样想,投影方程 x=PX,刻画的是一个空间中的点与其对应的平面中的点的关系,既然已知了参考坐标下的相机矩阵也就是P,那么只要做一个的空间坐标变换,便可找到第二个坐标系对应的相机矩阵。
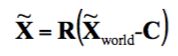
C表示参考坐标系的原点在第二个坐标系中的空间坐标,这里用其负值表示一个反向平移的关系。Xworld表示的是同一个三维点在第二个坐标系中对应的空间坐标,X代表参考系中的空间坐标,波浪线表示这是在非齐次坐标下,也就是说一个坐标只有3个量。
但事实是我们的相机矩阵都是在齐次坐标下刻画出来的,所以这里需要用齐次坐标来重新表达这个关系。
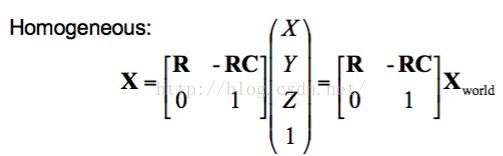
上图便是齐次坐标中关于坐标转换的表达,接下来直接将变换后的空间坐标X代入参考坐标系下的投影方程,便可以得到第二个坐标系中的投影方程
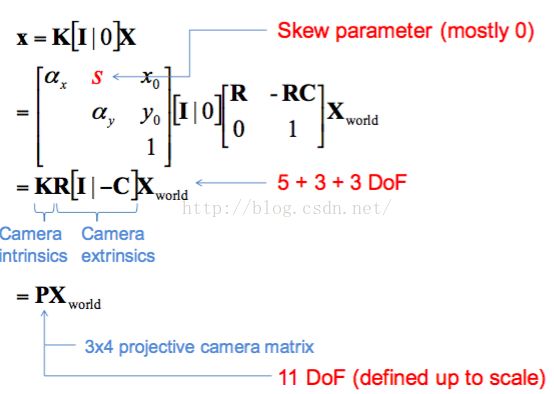
以上便是最一般化的投影方程
关于相机的标定,实际上就是确定相机矩阵P,或者有时只需要内部矩阵K即可,因为外部矩阵并不是绝对的。
关于相机矩阵P,这是一个3x4的矩阵,一共12个量,但是它的自由度只有11。这是因为相机矩阵P是在齐次坐标的表达下求解出来的,由于齐次坐标存在Scaling Ambiguity,我们无法确定乘的这个标量,所以相机矩阵也存在相同的问题,这使得它失去了一个自由度。
更具体来说,在内部矩阵K中有5个自由度,分别是那5个参数,旋转矩阵有3个自由度,分别是绕x,y,z旋转的三个角度,平移向量有三个自由度,分别是点C在非齐次坐标下的三个坐标值。
---------------------------------------------------------------
以上是所有需要的理论基础,下一篇会讲解具体的相机标定实现方法。