计算机视觉(二)图像的匹配
一.引言
如何判断两个物体是不是同一个?
- 我们可以根据物体的颜色、纹理、大小、形状等特征来判断。然而,有时候在多种因素的影响下,如物体旋转、尺度变化、仿射变换,会改变物体的多数特征,涉及物体的鲁棒性(Robust),这里暂且不提,但可以知道的是,纹理是物体不变的特征。因此,检测纹理即可判断物体是否为同一个。
那么,如何检测纹理?
- 角点是纹理的最好反映。
接着,什么是角点?
- 目前为止还没有明确的数学定义,可以理解为极值点,即在某方面属性突出的点。或者说是特征点,具有很好的不会被破坏的特征的可描述点。具体情况具体分析,由于角上的点比较精确,一般不会因外界因素影响而改变,所以特征点常常是角点。
最后,如何进行角点检测与匹配?
- 接下来简单介绍三种算法:Fast算法、Harris算法以及两者相结合的ORB算法。
二.Fast算法
1.优点:
可以进行实时的特征检测。
2.原理:
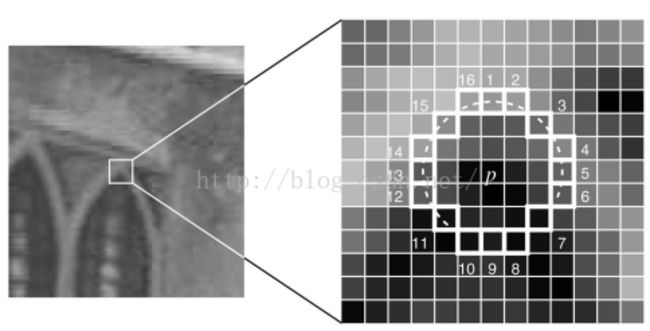
-在图像中任选一像素点p,设其像素值为I
-设定一个阈值t
-以3为半径画圆,覆盖p点周围的16个像素点(如图所示)
-如果这周围的16个像素中有连续的n个像素的像素值都小于I-t,或者有连续的n个像素都大于I+t,那么这个点就被判断为角点。opencv中n被设定为12。
-对以上步骤进行优化,可以先检测p点周围的四个点,即1, 5, 9, 12四个点中是否有三个点满足超过I+t,如果不满足,则直接跳过,如果满足,则继续使用前面的算法,全部判断16个点中是否有12个满足条件。
图片如下:
3.代码:
#include(0, 0);
//定义待检测点周围四个点的相对位置,pos[x][y],x取4表示4个点,y取0或1表示x轴和y轴的变化
int pos[4][2];
//第0号点在x轴不变,y轴变
pos[0][0] = 0;
pos[0][1] = -3;
//第1号点在x轴变,y轴不变
pos[1][0] = 3;
pos[1][1] = 0;
//第2号点在x轴不变,y轴变
pos[2][0] = 0;
pos[2][1] = 3;
//第3号点在x轴变,y轴不变
pos[3][0] = -3;
pos[3][1] = 0;
//边缘3个点无法检测,从3开始循环,防止溢出
for (int i = 3; i < frame.rows - 3; i++)
{
for (int j = 3; j < frame.cols - 3; j++)
{
int num = 0;
uchar cen = frame.at(i, j);//中心像素点
for (int k = 0; k < 4; k++)
{
uchar temp = frame.at(i + pos[k][0], j + pos[k][1]);//周围几个点的坐标等于中心像素点的坐标加上相对位置
if (isdif(cen, temp))
{
num++;
}
}
if ((num == 1) || (num == 3) || (num == 4))
//差别很大的点有1或3或4个时均为角点
{
circle(frame_rgb, cvPoint(j, i), 2, CV_RGB(255, 0, 0), 2);//圈出这个点
}
}
}
imshow("frame", frame_rgb);
waitKey(10); 三.Harris算法
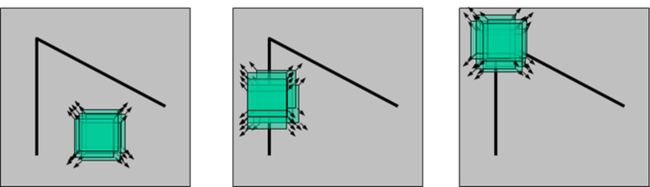
1.原理:
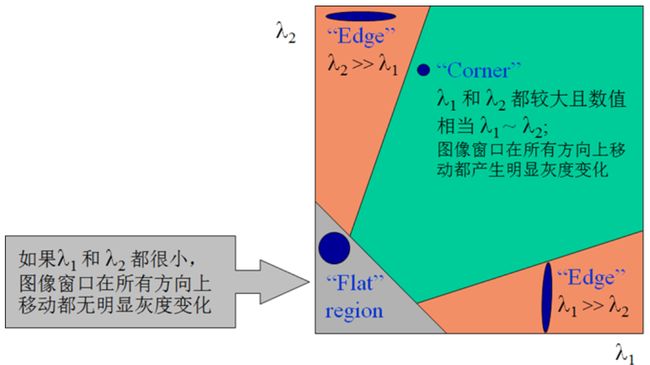
简单说,角点在各个方向的变化都是最大的,而边缘区域在只是某一方向有明显变化,如下图所示
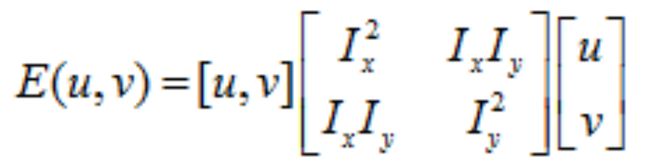
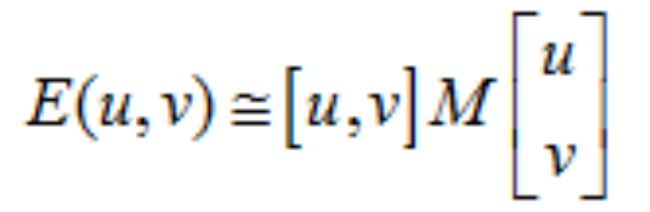
从数学上讲,基本公式如下


w(x,y)表示移动窗口,I(x,y)表示像素灰度值强度,范围为0~255。
根据泰勒级数展开计算偏导数可得Harris矩阵,如下图
再计算Harris角点响应值,R=det(M)-k*(trace(M)^2),据学长实际操作,发现实际运算只计算k*(trace(M)^2),并不需要前半部分。
根据下图加以理解
个人还不是很理解这个算法,以上解释不保证正确。
2.代码:
一般算法:
#include(0, 0);
for (int i = 1; i < frame.rows-1; i++)
{
for (int j = 1; j < frame.cols-1; j++)
{
double IX, IY;
IX = frame.at(i, j - 1) - frame.at(i, j + 1);
IY = frame.at(i - 1, j) - frame.at(i + 1, j);
double R = IX*IX*IY*IY - 0.23*(IX*IX + IY*IY);
//套用公式,其中0.23的值可变,范围0.1-0.5
//cout << R << endl;
if (R > 10000)//这里的10000的值也可变
{
circle(frame_rgb, cvPoint(j, i), 1, CV_RGB(255, 0, 0));
//圈出这个点
}
}
}
imshow("frame", frame_rgb);
waitKey(10);
} 调用API的算法:
#include四.ORB算法
1.原理:
首先用Harris fast算法进行角点检测,再进行角点匹配,从而完成图像匹配;
在角点检测步骤,先用fast算法选取一定量的可能点,再用Harris算法进一步筛选,得到更为精确的角点。
2.代码:
暂且放上调用API的版本:
#include dector = ORB::create(500, 1.2f, 8, 31, 0, 2, ORB::FAST_SCORE, 31, 30);
dector->detect(FrameROI1, keypoint1, Mat());
dector->detect(FrameROI2, keypoint2, Mat());
//Ptr dector2 =ORB::create(50, 1.2f, 1, 31, 0, 2, ORB::FAST_SCORE, 31, 30);
if (Flag == 0)
{
Ptr pd0 = ORB::create(500, 1.2f, 8, 31, 0, 2, ORB::FAST_SCORE, 31, 30);
pd0->compute(FrameROI1, keypoint1, des1);
pd0->compute(FrameROI2, keypoint2, des2);
}
if (Flag == 1)
{
Ptr pd1 = BRISK::create();
pd1->compute(FrameROI1, keypoint1, des1);
pd1->compute(FrameROI2, keypoint2, des2);
}
if ((keypoint1.size()>1) && (keypoint2.size()>1))
{
vector <vector matcher = DescriptorMatcher::create("BruteForce-Hamming");
matcher->knnMatch(des1, des2, Vmatch, 2);
vector int quaryx = KNmatch.at(i).queryIdx;
int trainx = KNmatch.at(i).trainIdx;
float mx = keypoint1.at(quaryx).pt.x;
float my = keypoint1.at(quaryx).pt.y;
float kx = keypoint2.at(trainx).pt.x;
float ky = keypoint2.at(trainx).pt.y;
Point2f p1;
Point2f p2;
p1.x = mx;
p1.y = my;
p2.x = kx;
p2.y = ky;
if (abs(ky - my)<5)
{
kp1.push_back(p1);
kp2.push_back(p2);
}
}
}
}
else
{
kp1.clear();
kp2.clear();
}
}
void DrawFeature(Mat &rematch, Mat Frame1, Mat Frame2, vector 255, 0, 0), 2);
}
}