SLAM笔记(一)SLAM中的数学基础概览
SLAM笔记系列系慕尼黑工业大学读书笔记,途中参考半闲居士,白巧克力亦唯心的博客加深理解,在此感谢两位。
1. 群
1.1群的定义
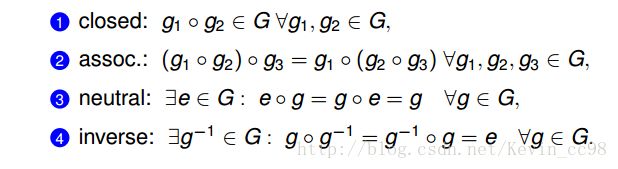
群G是一个集合加上这个集合的操作/运算。群需要具备封闭性,结合律,有单位元/幺元,有逆元这四个条件:
1. 2 群的矩阵表示
可以在群和矩阵之间建立单映射关系R:
R: G -> GL(n)
这种映射关系关系叫群同态.
用矩阵表示群是因为这样能更好地分析群的更抽象的性质,比如旋转群:群的逆元是矩阵的逆,就是反着转;幺元就是不转的矩阵;两个旋转矩阵相聚合又是一个新的旋转矩阵。
1.3. 常用群
1> 一般线性群(general linear matrix): GL(n) G L ( n )
满足: det(A)≠0 d e t ( A ) ≠ 0
2> 特殊线性群(special linear matrix): SL(n) S L ( n )
满足: det(A)=1 d e t ( A ) = 1
3> 仿射群 affine group A(n):
表示
4> 正交群 orthogonal group O(n):
点积下:
另外一种定义是
因此有 QTQ=I Q T Q = I
也有 det(QTQ)=(det(Q))2=I d e t ( Q T Q ) = ( d e t ( Q ) ) 2 = I
则 det(Q) d e t ( Q ) = 1或-1
注意:
正交群的矩阵Q是矩阵与矩阵转置 相乘为单位矩阵。
这和 特殊线性群矩阵行列式为1是不同的。
他们有重叠关系却没有包含关系。
5> 特殊正交群(旋转群)
如果正交群的Q满足det(Q) = 1,则称Q为特殊正交群,即旋转群SO(n),或者称之为李群(Lie group)。当然我们更常用R代表旋转群的元素。
特殊正交群SO(3)是正交的特殊线性群。
5>欧几里得群E(n):
欧几里得群E(n) 是仿射群的子集,区别是欧几里得群的将一般线性矩阵 A∈GL(n) A ∈ G L ( n ) 转换为 R∈O(n) R ∈ O ( n ) 正交矩阵
其矩阵形式 :
![]()
如果R为特殊正交矩阵SO(n),则对应的欧式群称为特殊欧式群SE(n);而SE(3)则是常见的rigid-body motions(刚体运动)
2.空间变换
三维的旋转群SO(3)可以由欧拉角、旋转矩阵、四元数等来表示。三维的旋转和位移即使SE(3
1>四元数
参考 SLAM笔记(八)-再谈四元数
2>欧拉角
欧拉角由滚转角-俯仰角-偏航角(roll-pitch-yaw)组成,但会遇到万向锁情况。
3>旋转矩阵
三维旋转可以直观表述为绕某一向量n进行角度为 θ θ 的旋转
表述为矩阵为

(2-1)
其中 cθ c θ , sθ s θ 分为 cosθ,sinθ c o s θ , s i n θ 。
对某一向量a = [x,y,z]进行旋转,只需要左乘R即可。
二维旋转,即对向量a = [x, y] 绕z轴进行旋转 θ θ ,则对a左乘向量(可手动旋转向量得证):
3 李群与李代数:
参见SLAM笔记-再谈李代数
3.4.刚体变换的李群
刚体群的变换(rigid body SE(3) translation )如下:

和上边同理,我们也可得到刚体变换的李群: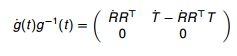
用 ŵ (t),v(t) w ^ ( t ) , v ( t ) 替换:

将 g−1 g − 1 放到右边:
![]()
因此g(t)在t周围的近似:
![]()
我们称 ξ̂ ξ ^ 为twist。怎么理解呢,就是又有角速度又有线速度,就好像钻头旋转着前进。
现在可以得到刚体变换SE(3)对应的李代数:

前面so(3)用3x3矩阵表达,实际元素只有3个;此处se(3)成4x4矩阵表达,但实际元素只有六个。因此可以定义一个 ∧,∨ ∧ , ∨ 来在向量表示和矩阵表示之间进行转换:

对于se(3)的向量表示,有的论文中前三维为平移,后三维为旋转,有的论文中则反过来,前三维旋转,后三维平移。
旋转变换so(3),SO(3)同理.
参照上面,可得se(3)的指数映射:
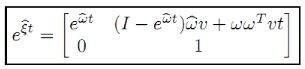
同理,对每一个SO(3)元素能在se(3)中找到一个对应的矩阵O,但可能有很多se(3)元素与之对应(只要so(3)的角度相差 2π 2 π )
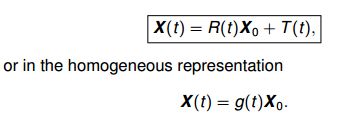
用刚体变换可以将世界坐标系中的点 X0 X 0 变换到相机坐标系X(t):
各种论文里涉及到的求解位姿矩阵时的非线性最小二乘优化(牛顿法,LM法),其中增量都是在单位矩阵处的tangent space se(3)上计算:
![]()
获得的增量(即相邻位姿变换关系)通过指数映射映射回多面体SE(3)上。通过这种方式,能够避免奇异点,保证很小的变换矩阵也能够表示出来。(《Scale Drift-Aware Large Scale Monocular SLAM》。)
3.5李代数其他部分
1>位移
对于运动中的相机,在帧t1上三维点X(t1)到帧t2对应点X(t2)的空间变换可用g(t1,t2)表示:
而转换回来则是:
上面两式左右分别相乘得到:
2>速度
对于X(t) = gX(0),对其求导得到速度:
而中间部分
正好是李代数。所以se(3)李代数描述的是位姿变化的相对速度
或
也能看出so(3)描述的是旋转速度。
伴随矩阵:
当另外一个观察者A从它所在的某一帧观察现在相机B时,其相对位姿为: Y(t)=gxyX(t) Y ( t ) = g x y X ( t ) 则有:
![]()
则A中观察到的B中某点速度为:
![]()
其中 V̂ y V ^ y 成为伴随矩阵
4.关于SLAM中常见群、空间变换的总结:
4.1常见群之间的关系
SO(n)⊂O(n)⊂GL(n) S O ( n ) ⊂ O ( n ) ⊂ G L ( n )
SL(n)⊂GL(n) S L ( n ) ⊂ G L ( n )
SE(n)⊂E(n)⊂A(n)⊂SL(n+1) S E ( n ) ⊂ E ( n ) ⊂ A ( n ) ⊂ S L ( n + 1 )
4.2 变换关系
欧式变换/刚体变换
(3D中6自由度,3旋转,3位移;体积不变)
相似变换(3D中7自由度)
相对欧式变换多了一个伸缩因子,对一个向量空间进行平移、旋转、缩放得到新的向量空间。
组成相似群Sim(n);在坐标轴上进行同时的缩放。
结构的体积会变;仍然保持线条、平面等夹角不变,当然平行性也得到保护。
仿射变换:(3D中12自由度,A矩阵 9自由度,t有3自由度)
对应于仿射群A(n):矩阵中A可逆,代表一般线性群。
表示一个向量空间进行一次线性变换,再进行一个平移,变换为另一个向量空间。
线条、平面等的夹角变化,仍然保持线条、平面的平行性;
射影变换(3D中15自由度)
也叫(三维空间平面上的)单应变换,也叫投影变换(projective transformation)
目前接触到的最一般的 线性变换,其中C,d,e,v没有限制,只要满秩。当v不为0时,对整个矩阵除以v,则能看出该变换矩阵有15自由度(9(A)+3(v)+3(t))。能保持平面相切和相交,点共线、共面的性质。
附录:
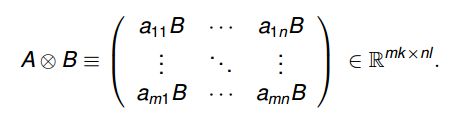
1.Kronecker product:
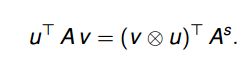
2. 矩阵A的栈 AS A S :
矩阵的列向量 a1 a 1 ,…, an a n 组成的长向量 [a1,,,an]T [ a 1 , , , a n ] T ;引入它是因为可将下式左边转换成右边:
3.分层三维重建
分层三维重建,如下图所示,就是指从多幅二维图像恢复欧几里德空间的三维结构时,不是从图像一步到欧几里德空间下的三维结构,而是分步分层地进行。即先从多幅图像的对应点重建射影空间下的对应空间点(即射影重建:projective reconstruction),然后把射影空间下重建的点提升到仿射空间下(即仿射重建:affine reconstruction),最后把仿射空间下重建的点再提升到欧几里德空间(或度量空间: metric reconstruction)

reference(部分内容摘自原文):
1.http://www.cnblogs.com/gaoxiang12/p/5137454.html
2.http://www.cnblogs.com/gaoxiang12/p/5120175.html
3.http://blog.csdn.net/heyijia0327/article/details/50446140
4.http://download.csdn.net/detail/heyijia0327/9388031 (资料下载)