如何构建一块电路板的护城河1_ADC的DMA读取和处理
STM32 编程
通过MXCUBE可以设置的参数如下:
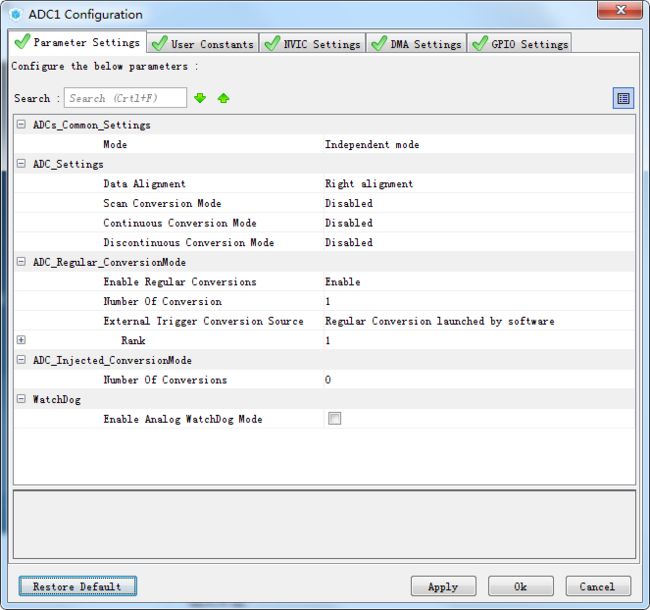
MXCUBE生成界面.png
初始化函数如下:
hadc1.Instance = ADC1;
hadc1.Init.ClockPrescaler = ADC_CLOCK_SYNC_PCLK_DIV4; //ADC的频率不建议太高
hadc1.Init.Resolution = ADC_RESOLUTION_12B; //精度
hadc1.Init.ScanConvMode = ENABLE; //使能,则是顺序转换模式,不再有插队情况
hadc1.Init.ContinuousConvMode = ENABLE; //连续转换,否则只转换一次
hadc1.Init.DiscontinuousConvMode = DISABLE; //连续转换,当然就不间断了
hadc1.Init.ExternalTrigConvEdge = ADC_EXTERNALTRIGCONVEDGE_NONE;//外部触发的边沿,这里NONE
hadc1.Init.ExternalTrigConv = ADC_SOFTWARE_START; //不需要外部触发
hadc1.Init.DataAlign = ADC_DATAALIGN_RIGHT; //低位对齐
hadc1.Init.NbrOfConversion = 8; //8个通道
hadc1.Init.DMAContinuousRequests = ENABLE; //连续不断写入DMA
hadc1.Init.EOCSelection = ADC_EOC_SINGLE_CONV;
ADC进行初始化以后,在MSP中会对开辟的DMA进行初始化,如下:
hdma_adc1.Instance = DMA2_Stream0;
hdma_adc1.Init.Channel = DMA_CHANNEL_0;
hdma_adc1.Init.Direction = DMA_PERIPH_TO_MEMORY;
hdma_adc1.Init.PeriphInc = DMA_PINC_DISABLE;
hdma_adc1.Init.MemInc = DMA_MINC_ENABLE;
hdma_adc1.Init.PeriphDataAlignment = DMA_PDATAALIGN_WORD;
hdma_adc1.Init.MemDataAlignment = DMA_PDATAALIGN_WORD;
hdma_adc1.Init.Mode = DMA_CIRCULAR;
hdma_adc1.Init.Priority = DMA_PRIORITY_MEDIUM;
hdma_adc1.Init.FIFOMode = DMA_FIFOMODE_DISABLE;
在下面会有一条,将DMA和ADC连接起来。
__HAL_LINKDMA(adcHandle,DMA_Handle,hdma_adc1);
这样,将ADC1采样得到的数据,会自动的保存到dma的内存中。
MX还有一个任务,就是中断设置,如下:
{
HAL_ADC_IRQHandler(&hadc1);
}
HAL_DMA_IRQHandler(&hdma_adc1);
所以实际上,我们没有进行中断的处理,在初始化函数中,调用
uint32_t ADC_ConvertedValue[ADC_NUMOFCHANNEL];
……
HAL_ADC_Start_DMA(&hadc1,ADC_ConvertedValue,ADC_NUMOFCHANNEL);
这样,当ADC8个通道的值采集完成以后,自动会交给DMA,而DMA直接将数据保存到ADC_ConvertedValue中。其中ADC_ConvertedValue是DMA设置的数据宽度,一个8个通道的值。
我们先定义一个数据结构体,用来保存从数组中读出来的中间值,并不是和DMA通道物理对应,如下:
typedef struct
{
int32_t motor2_U_current;
int32_t motor2_V_current;
int32_t motor2_W_current;
int32_t motor1_U_current;
int32_t motor1_V_current;
int32_t motor1_W_current;
int32_t bus_volt;
int32_t controller_temp;
}DMA_AD_VALUE;
并在头文件中申明一下结构体:并在C文件中进行定义
extern DMA_AD_VALUE dma_ad;
DMA_AD_VALUE dma_ad;
同时我们设置一个结构体,用来保存一些中间变量,如下:
typedef struct {
int32_t BUS_Curr ; // DC Bus Current
int32_t PhaseU_Curr; // Phase A Current
int32_t PhaseV_Curr; // Phase A Current
int32_t BUS_Voltage ; //DC Bus Voltage
int32_t RP_speed_Voltage ; // RP1_Voltage
int32_t OffsetBUS_Curr ; // DC Bus Current
int32_t OffsetPhaseU_Curr; // Phase A Current
int32_t OffsetPhaseV_Curr; // Phase A Current
int32_t Coeff_filterK1; // Phase A Current
int32_t Coeff_filterK2; // Phase A Current
}ADCSamp;
#define ADCSamp_DEFAULTS {0,0,0,0,0,0,0,0,268,756}
有两个电机,所以我们申明和定义一个结构体变量如下:
extern ADCSamp ADCSampPareM1; // M1 refer to tim8
extern ADCSamp ADCSampPareM2; // M2 refer to tim1
ADCSamp ADCSampPareM1=ADCSamp_DEFAULTS;
ADCSamp ADCSampPareM2=ADCSamp_DEFAULTS;
首先,我们要读取所有模拟值的初始化值,初始化我们通过连续读取32次求平均值来获得,如下:
//校准作用,电流传感器的偏移值为1.65V
void Offset_CurrentReading(void)
{
static uint8_t i;
/* ADC Channel used for current reading are read in order to get zero currents ADC values*/
//32次采样求平均值,电流传感器初始校准
memset((uint8_t*)(&ADCSampPareM1),0,sizeof(ADCSampPareM1));
memset((uint8_t*)(&ADCSampPareM2),0,sizeof(ADCSampPareM2));
for(i=32; i!=0; i--)
{
ADCSampPareM1.OffsetBUS_Curr += ADC_ConvertedValue[6]; //通道6,总线电流
ADCSampPareM1.OffsetPhaseV_Curr += ADC_ConvertedValue[4];//电机M1 V相电流
ADCSampPareM1.OffsetPhaseU_Curr += ADC_ConvertedValue[5];
ADCSampPareM2.OffsetBUS_Curr += ADC_ConvertedValue[7];
ADCSampPareM2.OffsetPhaseU_Curr += ADC_ConvertedValue[3];
ADCSampPareM2.OffsetPhaseV_Curr += ADC_ConvertedValue[0];
Delay(10000);
Delay(10000);
}
ADCSampPareM1.OffsetBUS_Curr = ADCSampPareM1.OffsetBUS_Curr>>5; //除以2^5,获得平均数
ADCSampPareM1.OffsetPhaseV_Curr= ADCSampPareM1.OffsetPhaseV_Curr>>5;
ADCSampPareM1.OffsetPhaseU_Curr=ADCSampPareM1.OffsetPhaseU_Curr>>5;
ADCSampPareM2.OffsetBUS_Curr = ADCSampPareM2.OffsetBUS_Curr>>5;
ADCSampPareM2.OffsetPhaseV_Curr= ADCSampPareM2.OffsetPhaseV_Curr>>5;
ADCSampPareM2.OffsetPhaseU_Curr=ADCSampPareM2.OffsetPhaseU_Curr>>5;
}
有了上面的数组,我们可以通过如下的两个函数计算电机相线的电流值
void ADC_Sample_M1(void )
{
ADCSampPareM1.PhaseV_Curr=((ADC_ConvertedValue[4]-ADCSampPareM1.OffsetPhaseV_Curr)<<2);
ADCSampPareM1.PhaseU_Curr=((ADC_ConvertedValue[5]-ADCSampPareM1.OffsetPhaseU_Curr)<<2);
}
void ADC_Sample_M2(void )
{
ADCSampPareM2.PhaseV_Curr=((ADC_ConvertedValue[0]-ADCSampPareM2.OffsetPhaseV_Curr)<<2);
ADCSampPareM2.PhaseU_Curr=((ADC_ConvertedValue[3]-ADCSampPareM2.OffsetPhaseU_Curr)<<2);
}
然后调用clark变换和PARK变换,用来做SVPWM计算
ADC_Sample_M2( );
ClarkeI_M2.As=ADCSampPareM2.PhaseU_Curr;
ClarkeI_M2.Bs=ADCSampPareM2.PhaseV_Curr;
然后通过下面的计算,获得总线的电流值和温度值,代码定义在AD_period_task中,在user_period_task中被周期性的读取。而电机的电流值读取频率为18KHZ,频率比总线电流和温度的频率要快很多。
ADCSampPareM1.BUS_Curr = ADC_ConvertedValue[6]-ADCSampPareM1.OffsetBUS_Curr;
ADCSampPareM2.BUS_Curr = ADC_ConvertedValue[7]-ADCSampPareM2.OffsetBUS_Curr;
dma_ad.bus_volt = VOLT_TO_BUS_VOLT(CAL_ADCDMA_fifo_AVGRPM(AD_DMA_CH3,2));
// tempRIS_value = VOLT_TO_RISITOR(CAL_ADCDMA_fifo_AVGRPM(AD_DMA_CH2,1));
temp_ad100v = CAL_ADCDMA_fifo_AVGRPM(AD_DMA_CH2,1);
temp_ad100v = adva_to_100v(temp_ad100v);
tempRIS_value = VOLT_TO_RISI(temp_ad100v);
image
markdownFile.md
6.7 KB](https://app.yinxiang.com/shard/s51/res/2a638deb-9348-419d-aa4b-38fe1b2851a5/markdownFile.md)