AGV&&导航技术
五种导航三代技术
基于整个智能制造的发展,市场上较常见的导航方式通过技术大致可分为三代:第一代是电磁和磁导航,第二代是现在行业主流的二维码导航,第三代分为两大类,分别是基于激光与视觉的两种SLAM算法导航。
第一代导航技术
主要是被动的接受信息,较为传统,需要对应用场景进行改造。如电磁导航,其导航原理是在AGV行驶路径上埋置金属线,然后给金属线加载导航频率,通过AGV上的电磁感应线圈来感应磁场的强弱,进行识别和跟踪。这种导航的方式优点是不易破损、污染,成本低,缺点是路径固定,不易改造。
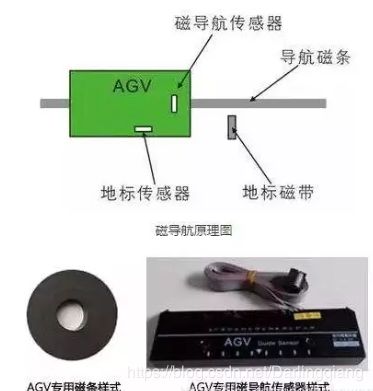
磁导航与电磁导航技术接近,不同在于其采用贴在路面的磁条替代埋置在地面下的金属线,通过磁场传感器检测磁带信号控制导航,在拐弯或特定的位置可以配合RFID技术识别感应,实现精确导航。
【延伸】RFID(Radio Frequency Identification)技术,又称无线射频识别,是一种通信技术,可通过无线电讯号识别特定目标并读写相关数据,而无需识别系统与特定目标之间建立机械或光学接触。
这种导航方式成本低,线路稳定,缺点是易污染和破损,容易受外界的影响。此技术也是目前运用最为广泛,最成熟的导航技术之一。
第二代导航技术
在第一代的基础上进行完善,二维码导航需要AGV识别周围标志信息,利用AGV子系统计算分析其所处位置,以无线通信的方式反馈给中心电脑,进而对AGV整体规划和调度。二维码导航优点是定位精度高,灵活性好,对声光无干扰。缺点是成本高,对陀螺仪的精度要求高。
近些年来,受益于二维码材质的更新换代等原因,以前的二维码需经常更换的问题已经解决,例如马路创新的二维码技术已经可以达到即使有50%到75%的破损度也可进行识别。
殊途同归的第三代技术
重头戏就是第三代,目前在资本市场,各类机器视觉与激光雷达一片火热。截至2018年10月,已经有近十家机器视觉公司完成千万级融资,而在几天前,激光雷达企业速腾聚创完成由菜鸟、上汽、北汽投资的行业单笔最大融资——3亿。SLAM(SimultaneousLocalization And Mapping),即同时定位与地图构建, SLAM技术对于机器人或其他智能体的行动和交互能力至为关键,因为它代表了这种能力的基础:知道自己在哪里,知道周围环境如何,进而知道下一步该如何自主行动。可以说凡是拥有一定行动能力的智能体都拥有某种形式的SLAM系统。
在未来的各类SLAM算法导航中,基于激光雷达的激光SLAM和基于机器视觉的视觉SLAM(VSLAM)是两种研究最多、最可能大规模落地应用的SLAM,基本代表着第三代AGV导航技术的发展方向。在这两种SLAM导航方式中,目前应用较多的是激光SLAM,激光SLAM脱胎于早期的基于测距的定位方法(如超声和红外单点测距)。激光雷达距离测量比较准确,误差模型简单,在强光直射以外的环境中运行稳定,反馈信息本身包含直接的几何关系,使得机器人的路径规划和导航变得直观。激光SLAM理论研究也相对成熟,落地产品更丰富。
VSLAM,它可以从环境中获取海量的、富于冗余的纹理信息,拥有超强的场景辨识能力。早期的视觉SLAM基于滤波理论,其非线性的误差模型和巨大的计算量成为了它实用落地的障碍。近年来,随着具有稀疏性的非线性优化理论(Bundle Adjustment)以及相机技术、计算性能的进步,实时运行的视觉SLAM已经不再是梦想。
算法难度与计算需求
而在算法难度与计算需求,VSLAM难于激光SLAM。这里就要谈到一点,基于谷歌的开源模式,2016年已经推出了一整套的激光雷达解决方案,通俗的讲就是给激光SLAM构建了一个基础平台,可以在上面进行二次开发,一定程度属于站在巨人的肩膀看世界,相对来说就会容易一点。
反观视觉SLAM,首先图像处理本身就是一门很深的学问,基于非线性优化的地图构建上也是非常复杂和耗时的计算问题。实际环境中又需要通过优化和改进现有的视觉SLAM框架,比如加入光照模型、使用深度学习提取特征点以及使用单双目及多目融合视角等技术。这也是视觉SLAM进一步提升性能和实用性的必由之路。
计算需求方面,主流的激光SLAM可以在普通ARM CPU上实时运行,而视觉SLAM基本都需要较为强劲的准桌面级CPU或者GPU支持。但业界也看到了这其中蕴藏的巨大机会,为视觉处理定制的ASICS市场已经萌发。例如Intel旗下的Movidius,进行图像、视频与深度神经网络的处理,在瓦级的超低功耗下达到桌面级GPU才拥有的吞吐量。
■ 地图构建与累计误差
地图构建上,激光SLAM的特点是单点和单次测量都更精确,但地图信息量更小;视觉SLAM特别是通过三角测距计算距离的方法,在单点和单次测量精度上表现总体来讲不如激光雷达,但可以通过重复观测反复提高精度,同时拥有更丰富的地图信息。
累计误差方面,激光SLAM总体来讲较为缺乏回环检测的能力,累计误差的消除较为困难。而视觉SLAM使用了大量冗余的纹理信息,回环检测较为容易,即使在前端累计一定误差的情况下仍能通过回环修正将误差消除。
————————————————
曾有国外专家对AGV控制系统需解决的主要问题做了恰当的比喻:Where am I? (我在哪里?)Where am I going?(我要去哪里?) How can I get there?(我怎么去?),这三个问题归纳起来分别就是AGV控制系统中的三个主要技术:AGV的导航(Navigation),AGV的路径规划(Layout designing),AGV的导引控制(Guidance)。为了能够解决好这些问题,AGV系统的构成也必然复杂:
AGV控制系统分为地面(上位)控制系统、车载(单机)控制系统及导航/导引系统,其中,地面控制系统指AGV系统的固定设备,主要负责任务分配,车辆调度,路径(线)管理,交通管理,自动充电等功能;车载控制系统在收到上位系统的指令后,负责AGV的导航计算,导引实现,车辆行走,装卸操作等功能;导航/导引系统为AGV单机提供系统绝对或相对位置及航向。
AGV系统是一套复杂的控制系统,加之不同项目对系统的要求不同,更增加了AGV系统的软件结构YIJI 系统的复杂性,因此,系统在软件配置上设计了一套支持AGV项目从路径规划、流程设计、系统仿真(Simulation)到项目实施全过程的解决方案。上位机系统提供了可灵活定义AGV系统流程的工具,可根据用户的实际需求来规划或修改路径或系统流程;而上位系统也提供了可供用户定义不同AGV功能的编程语言。
地面控制系统
AGV地面控制系统(Stationary System)即AGV上位控制系统,是AGV系统的核心。其主要功能是对AGV系统(AGVS)中的多台AGV单机进行任务分配,车辆管理,交通管理,通讯管理等。
任务管理:任务管理类似计算机操作系统的进程管理,它提供对AGV地面控制程序的解释执行环境;提供根据任务优先级和启动时间的调度运行;提供对任务的各种操作如启动、停止、取消等。
车辆管理:车辆管理是AGV管理的核心模块,它根据物料搬运任务的请求,分配调度AGV执行任务,根据AGV行走时间最短原则,计算AGV的最短行走路径,并控制指挥AGV的行走过程,及时下达装卸货和充电命令。
交通管理:根据AGV的物理尺寸大小、运行状态和路径状况,提供AGV互相自动避让的措施,同时避免车辆互相等待的死锁方法和出现死锁的解除方法;AGV的交通管理主要有行走段分配和死锁报告功能。
通讯管理:通信管理提供AGV地面控制系统与AGV单机、地面监控系统、地面IO设备、车辆仿真系统及上位计算机的通信功能。和AGV间的通信使用无线电通信方式,需要建立一个无线网络,AGV只和地面系统进行双向通信,AGV间不进行通信,地面控制系统采用轮询方式和多台AGV通信;与地面监控系统、车辆仿真系统、上位计算机的通信使用TCP/IP通信。
车辆驱动:小车驱动负责AGV状态的采集,并向交通管理发出行走段的允许请求,同时把确认段下发AGV。
车载控制系统
AGV车载控制系统(Onboard System),即AGV单机控制系统,在收到上位系统的指令后,负责AGV单机的导航,导引,路径选择,车辆驱动,装卸操作等功能。
导航(Navigation):AGV单机通过自身装备的导航器件测量并计算出所在全局坐标中的位置和航向。
导引(Guidance):AGV单机根据现在的位置、航向及预先设定的理论轨迹来计算下个周期的速度值和转向角度值即,AGV运动的命令值。
路径选择(Searching):AGV单机根据上位系统的指令,通过计算,预先选择即将运行的路径,并将结果报送上位控制系统,能否运行由上位系统根据其它AGV所在的位置统一调配。AGV单机行走的路径是根据实际工作条件设计的,它有若干“段”(Segment)组成。每一“段”都指明了该段的起始点、终止点,以及AGV在该段的行驶速度和转向等信息。
车辆驱动(Driving):AGV单机根据导引(Guidance)的计算结果和路径选择信息,通过伺服器件控制车辆运行。
导航导引方式
AGV之所以能够实现无人驾驶,导航和导引对其起到了至关重要的作用,随着技术的发展,目前能够用于AGV的导航/导引技术主要有以下几种:
1 直接坐标 (Cartesian Guidance)
用定位块将AGV的行驶区域分成若干坐标小区域,通过对小区域的计数实现导引,一般有光电式(将坐标小区域以两种颜色划分,通过光电器件计数)和电磁式(将坐标小区域以金属块或磁块划分,通过电磁感应器件计数)两种形式,其优点是可以实现路径的修改,导引的可靠性好,对环境无特别要求。缺点是地面测量安装复杂,工作量大,导引精度和定位精度较低,且无法满足复杂路径的要求。
2 电磁导引(Wire Guidance)
电磁导引是较为传统的导引方式之一,目前仍被许多系统采用,它是在AGV的行驶路径上埋设金属线,并在金属线加载导引频率,通过对导引频率的识别来实现AGV的导引。其主要优点是引线隐蔽,不易污染和破损,导引原理简单而可靠,便于控制和通讯,对声光无干扰,制造成本较低。缺点是路径难以更改扩展,对复杂路径的局限性大。
3 磁带导引 (Magnetic Tape Guidance)
与电磁导引相近,用在路面上贴磁带替代在地面下埋设金属线,通过磁感应信号实现导引,其灵活性比较好,改变或扩充路径较容易,磁带铺设简单易行,但此导引方式易受环路周围金属物质的干扰,磁带易受机械损伤,因此导引的可靠性受外界影响较大。
4 光学导引(Optical Guidance)
在AGV的行驶路径上涂漆或粘贴色带,通过对摄像机采入的色带图象信号进行简单处理而实现导引,其灵活性比较好,地面路线设置简单易行,但对色带的污染和机械磨损十分敏感,对环境要求过高,导引可靠性较差,精度较低。
5 激光导航(Laser Navigation)
激光导引是在AGV行驶路径的周围安装位置精确的激光反射板,AGV通过激光扫描器发射激光束,同时采集由反射板反射的激光束,来确定其当前的位置和航向,并通过连续的三角几何运算来实现AGV的导引。
此项技术最大的优点是,AGV定位精确;地面无需其他定位设施;行驶路径可灵活多变,能够适合多种现场环境,它是目前国外许多AGV生产厂家优先采用的先进导引方式;缺点是制造成本高,对环境要求较相对苛刻(外界光线,地面要求,能见度要求等),不适合室外(尤其是易受雨、雪、雾的影响)。
6 惯性导航 (Inertial Navigation)
惯性导航是在AGV上安装陀螺仪,在行驶区域的地面上安装定位块,AGV可通过对陀螺仪偏差信号(角速率)的计算及地面定位块信号的采集来确定自身的位置和航向,从而实现导引。
此项技术在军方较早运用,其主要优点是技术先进,较之有线导引,地面处理工作量小,路径灵活性强。其缺点是制造成本较高,导引的精度和可靠性与陀螺仪的制造精度及其后续信号处理密切相关。
7 视觉导航 (Visual Navigation )
8 GPS(全球定位系统)导航 (Global Position System)
通过卫星对非固定路面系统中的控制对象进行跟踪和制导,目前此项技术还在发展和完善,通常用于室外远距离的跟踪和制导,其精度取决于卫星在空中的固定精度和数量,以及控制对象周围环境等因素。由此发展出来的是iGPS(室内GPS)和dGPS(用于室外的差分GPS),其精度要远远高于民用GPS,但地面设施的制造成本是一般用户无法接受的。
参考资料:
https://www.cnblogs.com/agvcfy/p/9282131.html
https://www.cnblogs.com/TP0907/p/6419630.html
https://blog.csdn.net/hhaowang/article/details/88051099