OPENCV2.4.7+VS2010+海康威视摄像头
准备:VS2010,OpenCV2.4.7,海康威视网络PTZ摄像头,Win10操作系统。
一.摄像头的安装
1.按照说明书安装好摄像头,用网线连接在电脑上,配置电脑IP或者摄像头IP,保证摄像头和电脑在同一个网段,这时摄像头会提醒成功连接网络。
2.从海康威视官网上下载SADP并安装(这个版本的SADP我下载下来以后装上了却用不了,后来我就下了比这个低一个版本的,可以使用),按照说明书在SADP中激活摄像头即可,或者直接在浏览器中登入摄像头的IP中,进行操作也可以,我是用浏览器激活的。


配置结束,在界面中会提醒下载插件,

按照提示安装好插件,注意在安装插件时关掉浏览器。安装好插件以后重新登陆,就可以看到摄像头的画面了。

二.SDK环境配置配置
1.opencv的环境配置
这里和前面的opencv配置一致,提示:将需要用到的属性页单独建立出来,以后要用的时候可以直接添加进去。
2.海康威视SDK的配置
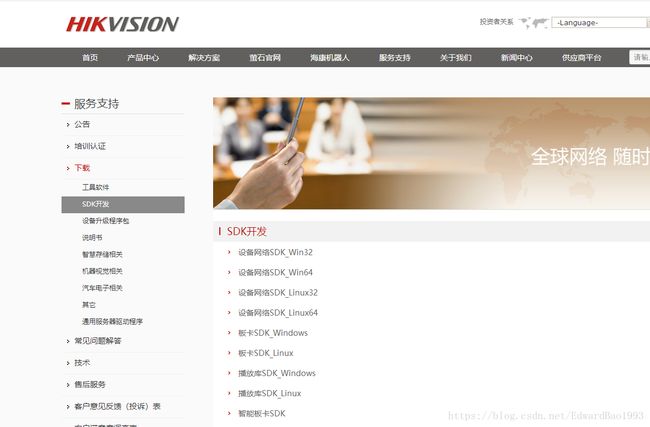
(1)下载SDK
进入海康威视官网,下载SDK。切记:如果你的opencv用的是32位操作台,SDK要用32位的,我的电脑是64 位的,但是我的vs2010用的是32位,所以我用的海康威视SDK也是32位的。
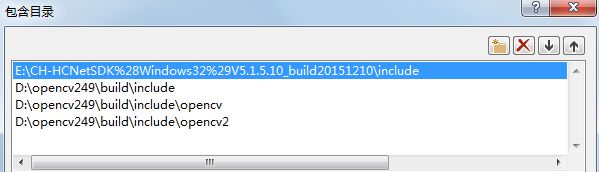
2.将下载好的SDK里的“库文件”改名为“lib”,将“头文件”改名为“include”,在vs2010的属性里添加这个目录。
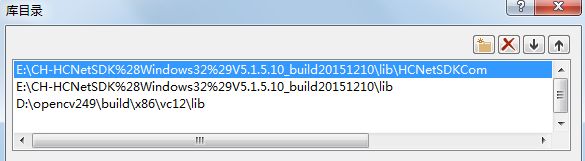
添加库文件:既要添加库文件lib也要把lib下的HCNetSDKCom文件包含进去。
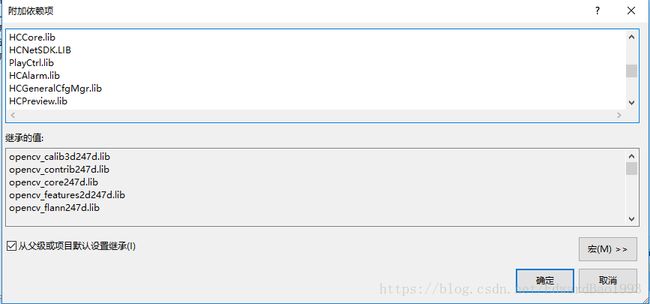
添加依赖项:
GdiPlus.lib
HCCore.lib
HCNetSDK.LIB
PlayCtrl.lib
HCAlarm.lib
HCGeneralCfgMgr.lib
HCPreview.lib
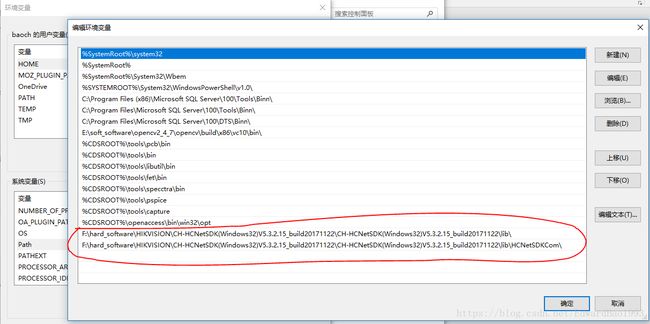
3.环境变量配置
添加包含.dll文件的目录。
4.在网页里打开摄像头,运行一下代码:
#include "stdafx.h"
#include
#include
#include
#include"Windows.h"
#include"HCNetSDK.h"
#include "plaympeg4.h"
#include
#include
using namespace std;
using namespace cv;
LONG nPort = -1;
volatile int gbHandling = 3;//解码回调 视频为YUV数据(YV12),音频为PCM数据
void CALLBACK DecCBFun(long nPort, char * pBuf, long nSize, FRAME_INFO * pFrameInfo, long nReserved1, long nReserved2)
{
if (gbHandling)
{
gbHandling--;
return;
}
long lFrameType = pFrameInfo->nType;
if (lFrameType == T_YV12)
{
Mat pImg(pFrameInfo->nHeight, pFrameInfo->nWidth, CV_8UC3);
Mat src(pFrameInfo->nHeight + pFrameInfo->nHeight / 2, pFrameInfo->nWidth, CV_8UC1, pBuf);
cvtColor(src, pImg, CV_YUV2BGR_YV12);
// Sleep(-1);
imshow("IPCamera", pImg);
waitKey(1);
}
gbHandling = 3;
}///实时流回调
void CALLBACK fRealDataCallBack(LONG lRealHandle, DWORD dwDataType, BYTE *pBuffer, DWORD dwBufSize, void *pUser)
{ switch (dwDataType)
{
case NET_DVR_SYSHEAD: //系统头
if (!PlayM4_GetPort(&nPort)) //获取播放库未使用的通道号
{
break;
}
//m_iPort = lPort; //第一次回调的是系统头,将获取的播放库port号赋值给全局port,下次回调数据时即使用此port号播放
if (dwBufSize > 0)
{
if(!PlayM4_SetStreamOpenMode(nPort, STREAME_REALTIME)) //设置实时流播放模式
{
break;
}
if (!PlayM4_OpenStream(nPort, pBuffer, dwBufSize, 10 * 1024 * 1024)) //打开流接口
{
break;
}
if (!PlayM4_Play(nPort, NULL)) //播放开始
{
break;
}
if (!PlayM4_SetDecCallBack(nPort, DecCBFun))
{
break;
}
}
break;
case NET_DVR_STREAMDATA: //码流数据
if (dwBufSize > 0 && nPort != -1)
{
if (!PlayM4_InputData(nPort, pBuffer, dwBufSize))
{
cout << "error" << PlayM4_GetLastError(nPort) << endl;
break;
}
}
break;
default: //其他数据
if (dwBufSize > 0 && nPort != -1)
{
if (!PlayM4_InputData(nPort, pBuffer, dwBufSize))
{
break;
}
}
break;
}
}
void CALLBACK g_ExceptionCallBack(DWORD dwType, LONG lUserID, LONG lHandle, void *pUser)
{ char tempbuf[256] = { 0 };
switch (dwType)
{
case EXCEPTION_RECONNECT: //预览时重连
printf("----------reconnect--------%d\n", time(NULL));
break;
default:
break;
}
}
void main()
{ //---------------------------------------
// 初始化
NET_DVR_Init();
//设置连接时间与重连时间
NET_DVR_SetConnectTime(2000, 1);
NET_DVR_SetReconnect(10000, true);
//---------------------------------------
// 注册设备
LONG lUserID;
NET_DVR_DEVICEINFO_V30 struDeviceInfo;
lUserID = NET_DVR_Login_V30("192.168.1.64", 8000, "admin", "a123456789", &struDeviceInfo);
if (lUserID < 0)
{
printf("Login error, %d\n", NET_DVR_GetLastError());
NET_DVR_Cleanup();
return;
}
//---------------------------------------
//设置异常消息回调函数
NET_DVR_SetExceptionCallBack_V30(0,NULL,g_ExceptionCallBack,NULL); //---------------------------------------
//启动预览并设置回调数据流
LONG lRealPlayHandle;
cvNamedWindow("Mywindow", 0);
cvNamedWindow("IPCamera", 0);
HWND h = (HWND)cvGetWindowHandle("Mywindow");
if (h == 0)
{ cout << "窗口创建失败" << endl; }
NET_DVR_PREVIEWINFO struPlayInfo = { 0 };
struPlayInfo.hPlayWnd = h; //需要SDK解码时句柄设为有效值,仅取流不解码时可设为空
struPlayInfo.lChannel = 1; //预览通道号
struPlayInfo.dwStreamType = 0; //0-主码流,1-子码流,2-码流3,3-码流4,以此类推
struPlayInfo.dwLinkMode = 0; //0- TCP方式,1- UDP方式,2- 多播方式,3- RTP方式,4-RTP/RTSP,5-RSTP/HTTP
lRealPlayHandle=NET_DVR_RealPlay_V40(lUserID,&struPlayInfo,fRealDataCallBack,NULL);
if (lRealPlayHandle < 0)
{
printf("NET_DVR_RealPlay_V40 error\n");
printf("%d\n", NET_DVR_GetLastError());
NET_DVR_Logout(lUserID);
NET_DVR_Cleanup();
return;
}
waitKey();
Sleep(-1);
//---------------------------------------
//关闭预览
NET_DVR_StopRealPlay(lRealPlayHandle);
//注销用户
NET_DVR_Logout(lUserID);
//释放SDK资源
NET_DVR_Cleanup();
return;
}
5.运行结果如下:

参考博客:
(1)OpenCV+海康威视摄像头的实时读取 http://blog.csdn.net/lonelyrains/article/details/50350052
(2)OpenCV+海康威视摄像头的实时读取 http://blog.csdn.net/bbzz2/article/details/53214579
(3)opencv读取海康威视摄像头http://blog.csdn.net/shakevincent/article/details/51490197
(4)海康威视摄像头的读取(vs2010+opencv2.4.9)http://blog.csdn.net/wangdeyu1994/article/details/76284087