一 安装Ubuntu16.04
Ubuntu官网下载
启动盘制作工具rufus-2.12
直接在官网下载就可以了,开源的,免费的。所以看到收费页面就仔细看,在最下面跳转到下载页面。
官方ROS安装及使用教程
推荐看英文版,下载个有道就好了,中文版反而看不懂它在讲什么。
插播一点关于SSH的安装和配置-虽然我没有配置成功
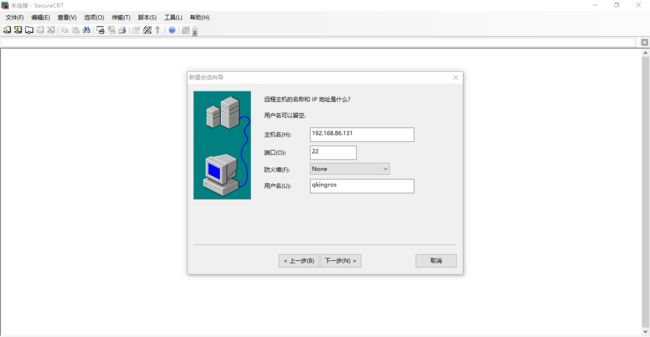
这是为了可以实现Ubuntu远程登录,这样使用起来更方便,可以在windows上用SecureCRT远程登录虚拟机上的Ubuntu。我没有配置成功,不知道怎么回事。先写到这里好了。
1. 更新源列表
打开"终端窗口",输入sudo apt-get update-->回车-->"输入当前登录用户的管理员密码"-->回车,就可以了。
2. 安装ssh
打开"终端窗口",输入sudo apt-get install openssh-server-->回车-->输入"y"-->回车-->安装完成。
3. 查看ssh服务是否启动
打开"终端窗口",输入sudo ps -e |grep ssh-->回车-->有sshd,说明ssh服务已经启动,如果没有启动,输入sudo service ssh start-->回车-->ssh服务就会启动。
4. 使用gedit修改配置文件/etc/ssh/sshd_config
打开"终端窗口",输入sudo gedit /etc/ssh/sshd_config-->回车-->把配置文件中的PermitRootLogin without-password加一个"#"号,把它注释掉-->再增加一句PermitRootLogin yes-->保存,修改成功。
还需要把##ListenAddress 0.0.0.0改了,改成下面获取的ip
Port 6131就是端口号,默认是22,可以随便改一个
5. 查看Ubuntu的IP地址
打开"终端窗口",输入sudo ifconfig-->回车-->就可以查看到IP地址。
ens33 Link encap:Ethernet HWaddr 00:0c:29:72:4e:c8
inet addr:192.168.86.131 Bcast:192.168.86.255 Mask:255.255.255.0
inet6 addr: fe80::55c0:12d7:b4af:a9ad/64 Scope:Link
UP BROADCAST RUNNING MULTICAST MTU:1500 Metric:1
RX packets:4366 errors:0 dropped:0 overruns:0 frame:0
TX packets:915 errors:0 dropped:0 overruns:0 carrier:0
collisions:0 txqueuelen:1000
RX bytes:5799541 (5.7 MB) TX bytes:72114 (72.1 KB)
lo Link encap:Local Loopback
inet addr:127.0.0.1 Mask:255.0.0.0
inet6 addr: ::1/128 Scope:Host
UP LOOPBACK RUNNING MTU:65536 Metric:1
RX packets:257 errors:0 dropped:0 overruns:0 frame:0
TX packets:257 errors:0 dropped:0 overruns:0 carrier:0
collisions:0 txqueuelen:1
RX bytes:21509 (21.5 KB) TX bytes:21509 (21.5 KB)
inet addr:192.168.86.131就是ip地址。
6. 远程登录
二 软件中心配置
安装过程中会遇到一些无法获取软件源的问题,可参考下面链接。同时改变软件源的获取服务器。
hash sum mismatch解决方法
配置可以直接使用GUI配置,打开左上角,搜索software&updates就可以了。
把那几项都打上勾,download from选项就是选择服务器。然后关掉窗口。
另外最好设置一下禁止Ubuntu进入休眠,在System Setting-Brightness&Lock中,把第一项改成never,以防安装过程中去喝口水它都休眠了
三 ROS安装
3.1 配置你的sources.list
这个文件里面记录了一些代码啊,软件啊的注册信息之类的。需要给其配置上ROS的获取方式,大概就是这个意思。
输入命令
sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.list'
3.2 设置密钥
sudo apt-key adv --keyserver hkp://ha.pool.sks-keyservers.net:80 --recv-key 421C365BD9FF1F717815A3895523BAEEB01FA116
之后它会显示
Executing: /tmp/tmp.7suiq0NogM/gpg.1.sh --keyserver
hkp://ha.pool.sks-keyservers.net:80
--recv-key
421C365BD9FF1F717815A3895523BAEEB01FA116
gpg: requesting key B01FA116 from hkp server ha.pool.sks-keyservers.net
如果出现错误,可以多执行几次,因为有时候是网络问题导致的,以后遇到类似的错误,都可以多试几次或者查看是否还有网络。
3.3 安装
首先确定apt处于最新版
执行sudo apt-get update
如果出现错误,参考此链接apt-get update hash sum mismatch错误
然后全部安装
Desktop-Full Install: (Recommended) : ROS, rqt, rviz, robot-generic libraries, 2D/3D simulators, navigation and 2D/3D perception
执行命令sudo apt-get install ros-kinetic-desktop-full
这一步要很久很久,还可能会因为网络问题导致某些组件下载失败从而安装失败,如果遇到这种问题,建议更换software&update中的download from设置的服务器,校园网就选China里面的.edu.cn的就可以。
查看是否有可使用包
验证一下安装是否成功,输入命令
apt-cache search ros-kinetic
这一步我忘记做了,心比较大,主要是我都折腾了两天了,这一次安装算比较顺利的。
四 初始化ROS
在使用ROS之前要先初始化rosdep
执行命令sudo rosdep init
这一步可能会失败,我怀疑是前面的安装导致虚拟机网络中断了,重启了一下才好了。
然后再执行命令rosdep update
五 环境变量设置
设置环境变量能够很方便的在打开shell之后直接使用ROS,执行命令:
echo "source /opt/ros/kinetic/setup.bash" >> ~/.bashrc source ~/.bashrc
如果只想在本次打开的shell使用,可以使用命令:
source /opt/ros/kinetic/setup.bash
六 安装rosinstall插件
执行命令sudo apt-get install python-rosinstall
这是一个命令行工具,反正就是很方便,我也没学,不知道有多方便。
ROS很多第三方插件,安装格式为 sudo apt-get install ros-kinetic-...
例如:
sudo apt-get install ros-kinetic-turtlebot
七 测试ROS
其实就是最后验证一下能不能使用
输入命令roscore
如果出现如下提示
... logging to /home/qkingros/.ros/log/2465f3be-fb53-11e6-aabf-000c29724ec8/roslaunch-ubuntu-2419.log
Checking log directory for disk usage. This may take awhile.
Press Ctrl-C to interrupt
Done checking log file disk usage. Usage is <1GB.
started roslaunch server http://ubuntu:33013/
ros_comm version 1.12.6
SUMMARY
PARAMETERS
- /rosdistro: kinetic
- /rosversion: 1.12.6
NODES
auto-starting new master
process[master]: started with pid [2431]
ROS_MASTER_URI=http://ubuntu:11311/
setting /run_id to 2465f3be-fb53-11e6-aabf-000c29724ec8
process[rosout-1]: started with pid [2444]
started core service [/rosout]
那就可以去吃大餐去了,表示装好了。要是出现了别的提示,我也不知道该怎么办……奇葩问题太多了。
参考文献
ROS.org ROS官网
ROS不能再详细的安装教程 小萌是个球http://www.cnblogs.com/liu-fa/