莫烦Tensorflow教程(15~22)
十五、卷积神经网络
图像和语言方面结果突出
神经网络是由多层级联组成的,每层中包含很多神经元
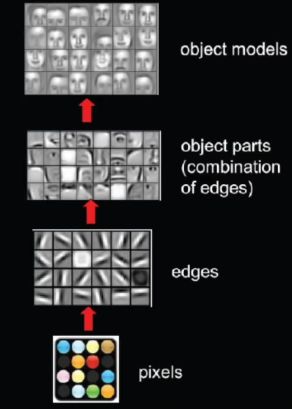
卷积:神经网络不再是对每个像素做处理,而是对一小块区域的处理,这种做法加强了图像信息的连续性,使得神经网络看到的是一个图像,而非一个点,同时也加深了神经网络对图像的理解,卷积神经网络有一个批量过滤器,通过重复的收集图像的信息,每次收集的信息都是小块像素区域的信息,将信息整理,先得到边缘信息,再用边缘信息总结从更高层的信息结构,得到部分轮廓信息,最后得到完整的图像信息特征,最后将特征输入全连接层进行分类,得到分类结果。
详细介绍:

猫的图像,有长、宽、高(颜色信息,黑白高度为1,彩色高度为3)
卷积:
经过卷积以后,变为高度更高,长和宽更小的图像,进行多次卷积,就会获得深层特征

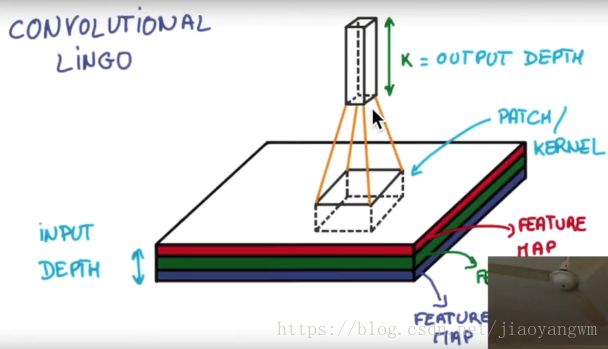
1)256*256的输入(RGB为图像深度)
2)不断的利用卷积提取特征,压缩长和宽,增大深度,也就是深层信息越多。
3)分类
池化:
提高鲁棒性
综合结构:

Tensorflow实现
import tensorflow as tf
from tensorflow.examples.tutorials.mnist import input_data
mnist=input_data.read_data_sets('MNIST_data',one_hot=True)
def compute_accuracy(v_xs,v_ys):
#全局变量
global prediction
#生成预测值,也就是概率,即每个数字的概率
y_pre=sess.run(prediction,feed_dict={xs:v_xs,keep_prob:1})
#对比预测的数据是否和真实值相等,对比位置是否相等,相等就对了
correct_prediction=tf.equal(tf.arg_max(y_pre,1),tf.arg_max(v_ys,1))
#计算多少个对,多少个错
#tf.cast(x,dtype),将x数据转换为dtype类型
accuracy=tf.reduce_mean(tf.cast(correct_prediction,tf.float32))
result=sess.run(accuracy,feed_dict={xs:v_xs,ys:v_ys,keep_prob:1})
return result
def weight_variable(shape):
initial=tf.truncated_normal(shape,stddev=0.1)
return tf.Variable(initial)
def bias_variable(shape):
initial=tf.constant(0.1,shape=shape)
return tf.Variable(initial)
def conv2d(x,W):
#stride[1,x_movement,y_movement,1]
return tf.nn.conv2d(x,W,strides=[1,1,1,1],padding='SAME') #x,y跨度都为1
def max_pooling_2x2(x):
return tf.nn.max_pool(x,ksize=[1,2,2,1],strides=[1,2,2,1],padding='SAME')
# define placeholder for input network
keep_prob=tf.placeholder(tf.float32)
xs=tf.placeholder(tf.float32,[None,784])
ys=tf.placeholder(tf.float32,[None,10])
#-1:代表图像数量不确定,1:黑白色,channel为1
# 将xs变为[28*28*1]的形状
x_image=tf.reshape(xs,[-1,28,28,1])
# conv1 layer
#patch/kernel=[5,5],input size=1也就是图像的深度为1,output size=32也就是卷积核的个数
W_con1=weight_variable([5,5,1,32])
b_conv1=bias_variable([32])
#hidded layer
h_conv1=tf.nn.relu(conv2d(x_image,W_con1)+b_conv1) #output size = 28*28*32
#pooling layer
h_pool1=max_pooling_2x2(h_conv1) #output size=14*14*32
# conv2 layer
W_conv2=weight_variable([5,5,32,64]) #patch 5x5,in size 32,out size 64
b_conv2=bias_variable([64])
h_conv2=tf.nn.relu(conv2d(h_pool1,W_conv2)+b_conv2)#outputsize=14*14*64
h_pool2=max_pooling_2x2(h_conv2) #output size=7*7*64
# func1 layer
W_fc1=weight_variable([7*7*64,1024])
b_fc1=bias_variable([1024])
h_pool2_flat=tf.reshape(h_pool2,[-1,7*7*64,]) #[n_samples,7,7,64]->[n_samples,7*7*64]
h_fc1=tf.nn.relu(tf.matmul(h_pool2_flat,W_fc1)+b_fc1)
h_fc1_drop=tf.nn.dropout(h_fc1,keep_prob)
# func2 layer
W_fc2=weight_variable([1024,10])
b_fc2=bias_variable([10])
prediction=tf.nn.softmax(tf.matmul(h_fc1_drop,W_fc2)+b_fc2)
#the error between prediction and real data
cross_entropy=tf.reduce_mean(-tf.reduce_sum(ys*tf.log(prediction),reduction_indices=[1]))
train_step=tf.train.AdadeltaOptimizer(0.0001).minimize(cross_entropy)
init=tf.global_variables_initializer()
with tf.Session() as sess:
sess.run(init)
for i in range(1000):
batch_xs,batch_ys=mnist.train.next_batch(100)
sess.run(train_step,feed_dict={xs:batch_xs,ys:batch_ys,keep_prob:0.5})
if i%50 ==0:
print(compute_accuracy(mnist.test.images,mnist.test.labels))
结果:
0.103
0.7985
0.8934
0.9172
0.9296
0.9409
0.9411
0.951
0.9495
0.9536
0.9611
0.9586
0.9643
随机梯度下降训练:
使用一小部分的随机数据来进行训练被称为随机训练(stochastic training)- 在这里更确切的说是随机梯度下降训练。在理想情况下,我们希望用我们所有的数据来进行每一步的训练,因为这能给我们更好的训练结果,但显然这需要很大的计算开销。所以,每一次训练我们可以使用不同的数据子集,这样做既可以减少计算开销,又可以最大化地学习到数据集的总体特性。
十六、Saver 保存读取
Tensorflow目前只能保存Varibales,而不能保存框架,所以需要重新定义一下框架,再把Varibales放进来重新学习。
import tensorflow as tf
import numpy as np
# #save to file
# W=tf.Variable([[1,2,3],[3,4,5]],dtype=tf.float32,name='weight')#2行3列的weight
# b=tf.Variable([[1,2,3]],dtype=tf.float32,name='biases') #1行3列
#
# init=tf.global_variables_initializer()
#
# #saver用来存储各种变量
# saver=tf.train.Saver()
#
# with tf.Session() as sess:
# sess.run(init)
# # 把返回的值保存在save_path中,将sess中的所有东西都保存
# save_path=saver.save(sess,"my_net/save_net.ckpt")
# print("Save to path:",save_path)
#restore variables
#只是一个空的框架,把上面保存的东西restore到这个框架中来
W=tf.Variable(np.arange(6).reshape((2,3)),dtype=tf.float32,name="weight")
b=tf.Variable(np.arange(3).reshape((1,3)),dtype=tf.float32,name="biases")
# no need to init step
saver=tf.train.Saver()
with tf.Session() as sess:
saver.restore(sess,"my_net/save_net.ckpt")
print("weight:",sess.run(W))
print("biases:",sess.run(b))结果:
weight: [[ 1. 2. 3.]
[ 3. 4. 5.]]
biases: [[ 1. 2. 3.]]十七、RNN
预测的顺序排列是很重要的
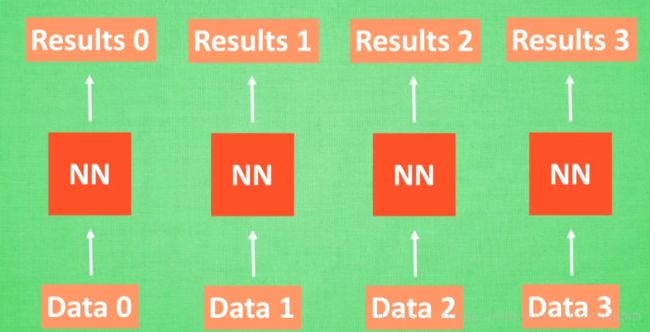
序列数据,预测result0的时候是基于Data0,如果数据是有顺序的,那么NN也可以分析出来数据中的关联,就会产生很好的效果。
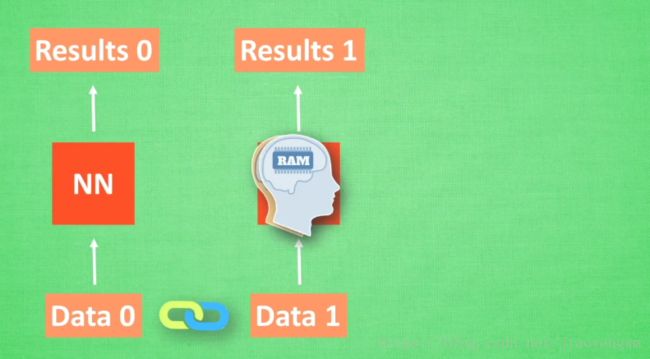
如果让NN了解数据的关联?——记住之前发生的事情

计算Data0之后,把分析结果存入记忆,分析Data1的时候,NN会产生新的记忆,但是两个记忆没有关联,此时就可以将Data0的记忆调用过来,NN会将之前的记忆都累积起来,继续分析则继续累积。

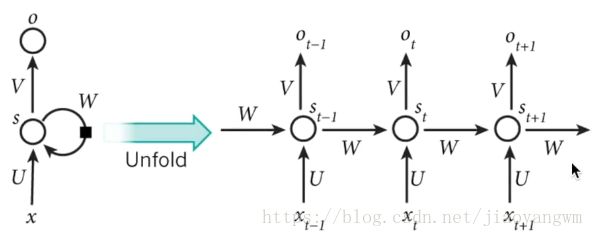
数学分析:
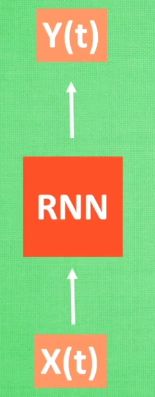



RNN每次运行完之后都会产生一个对于当前的分析(state) S(t) S ( t )
分析 X(t+1) X ( t + 1 ) 时刻,会产生一个 S(t+1) S ( t + 1 ) , Y(t+1) Y ( t + 1 ) 是由 S(t) S ( t ) 和 S(t+1) S ( t + 1 ) 共同创造的。
RNN的形式:

RNN形式很多变,所以功能越来越强大
原理介绍:
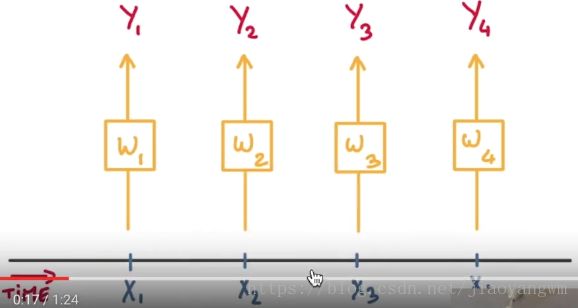
RNN对于处理有序的数据很有效,预测序列化的数据
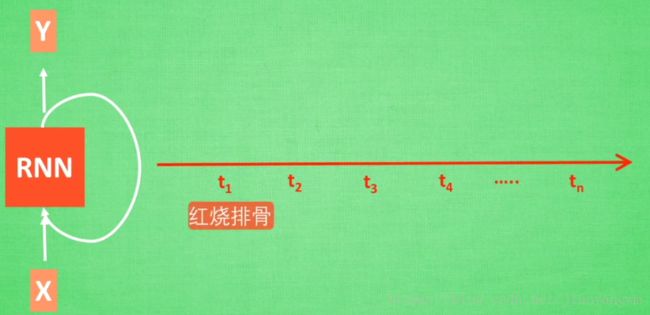
RNN:
预测有序的数据时,用x1预测得到y1,这部分的内存保存在cell中,之后对输入x2再用这个cell预测y2,在预测时,首先这个cell会调用之前存储的记忆,这部分记忆加上新的输入x2,进行一个总结,之后输出y2,所以得到的y2,不仅仅包含了输入x2,还包含了上一步的x1的记忆,也就是对x1,x2按顺序的一个总结。
下面的总体过程:
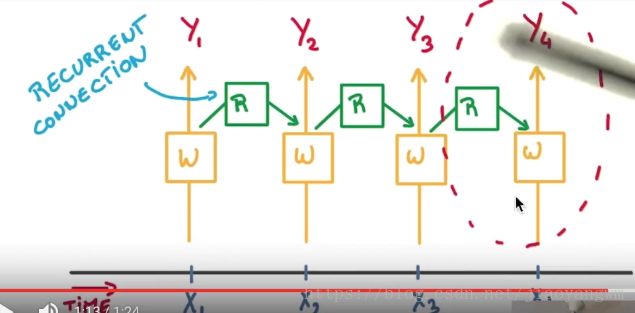
所有的w都是同一个w,经过同一个cell的时候,都会保留输入的记忆,再加上另外一个要预测的输入,所以预测包含了之前所有的记忆加上此次的输入。
普通的RNN,如果要预测的序列是一个很长的序列,则反向传播过程中存在梯度消失和梯度爆炸现象。
为了解决上述问题,提出了 LSTM RNN
Long Short-Term Memory,长短期记忆RNN
RNN是在有序的数据上进行学习的,RNN会产生对先前发生事件的记忆,不过一般形式的RNN有些“健忘”。
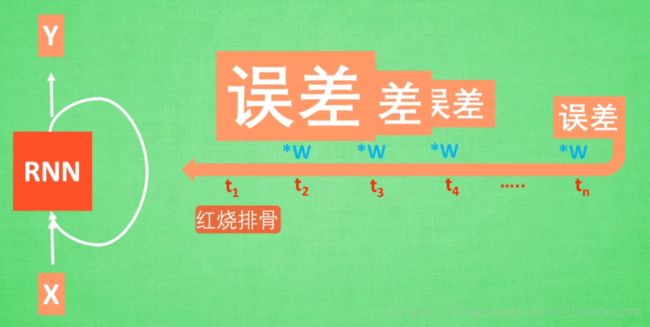
以“红烧排骨”来分析,普通RNN为什么对久远的记忆较差:
1)关键词“红烧排骨”要经过很多层训练到达输出,得到误差
2)误差反向传递时:得到的误差在每一步都会乘以系数 w w
- 如果 w<1 w < 1 ,则传递到前面的误差值就非常小,就是梯度消失
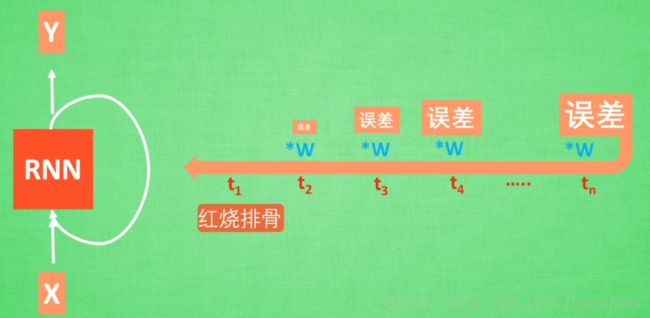
- 如果 w>1 w > 1 ,则传递到前面的误差值就非常大,超过了承受范围,计算梯度爆炸
LSTM的改进:增加了三个控制器——输入控制、输出控制、忘记控制

具体介绍:

输入:考虑要不要将分线剧情加入到主线剧情,如果某些分线剧情比较重要,那么就会按重要程度,将其写入总线剧情,再进行分析。
忘记:如果分线剧情改变了我们对主线剧情的认知,那么忘记剧情就会对之前的剧情进行忘记,按比例替换为现在的新剧情。
所以主线剧情的更新就取决于输入控制和忘记控制。
输出:基于目前的主线剧情和分线剧情,判断到底要输出什么。
基于上述控制机制,LSTM就延缓了记忆衰退。
Tensorflow
以图像来说,顺序表示什么?
就是第一行的像素算起,先考虑第一行,一直到最后一行。
import tensorflow as tf
from tensorflow.examples.tutorials.mnist import input_data
mnist=input_data.read_data_sets('MNIST_data',one_hot=True)
#hyperparameters
lr=0.1 #learning rate
training_iters=100000 #循环次数
batch_size=128
n_inputs=28 #MNIST data input(28*28),每次输入一行,即28个像素
n_steps=28 #总共28行,即输入28次28
n_hidden_unis=128 #隐层神经元
n_classes=10 #10个类
#tf Graph input
x=tf.placeholder(tf.float32,[None,n_steps,n_inputs])
y=tf.placeholder(tf.float32,[None,n_classes])
#Define weights
#weights:input weights+output weights
#进入RNN的cell之前,要经过一层hidden layer
#cell计算完结果后再输出到output hidden layer
#下面就定义cell前后的两层hidden layer,包括weights和biases
weights={
#(28,128)
'in':tf.Variable(tf.random_normal([n_inputs,n_hidden_unis])),
#(128,10)
'out':tf.Variable(tf.random_normal([n_hidden_unis,n_classes]))
}
biases={
#(128,)
'in':tf.Variable(tf.constant(0.1,shape=[n_hidden_unis,])),
#(10,)
'out':tf.Variable(tf.constant(0.1,shape=[n_classes,]))
}
def RNN(X,weights,biases):
#hidden layer for input to cell
#X(128 batch,28 steps,28 inputs),要转化成(128x128,28 inputs),因为要进行矩阵乘法
X=tf.reshape(X,[-1,n_inputs])
# 再变换为3维矩阵,(128 batch x 28 steps,128 hidden)
X_in=tf.matmul(X,weights['in'])+biases['in']
# 再变换为3维矩阵,(128 batch,28 steps,128 hidden)
X_in=tf.reshape(X_in,[-1,n_steps,n_hidden_unis])
#cell
#包含多少个节点,forget_bias:初始的forget定义为1,也就是不忘记,state_is_tuple:
lstm_cell=tf.nn.rnn_cell.BasicLSTMCell(n_hidden_unis,forget_bias=1.0,state_is_tuple=True)
#RNN每次计算一次都会保留一个state
#LSTM会保留两个state,lstm cell is divided into two parts(c_state,m_state),
#也就是主线的state(c_state),和分线的state(m_state),会包含在元组(tuple)里边
#state_is_tuple=True就是判定生成的是否为一个元组
# 初始state,全部为0,慢慢的累加记忆
_init_state=lstm_cell.zero_state(batch_size,dtype=tf.float32)
#outputs是一个list,每步的运算都会保存起来,time_majortime的时间点是不是在维度为1的地方,我们的放在第二个维度,28steps
outputs,states=tf.nn.dynamic_rnn(lstm_cell,X_in,initial_state=_init_state,time_major=False)
#hidden layer for outputs and final results
results=tf.matmul(states[1],weights['out'])+biases['out']
return results
pred=RNN(x,weights,biases)
#the error between prediction and real data
#labels是神经网络目标输出 , logistics是神经网络实际输出
cost=tf.reduce_mean(tf.nn.softmax_cross_entropy_with_logits(logits=pred,labels=y))
train_op=tf.train.AdadeltaOptimizer(lr).minimize(cost)
correct_pred=tf.equal(tf.arg_max(pred,1),tf.arg_max(y,1))
accuracy=tf.reduce_mean(tf.cast(correct_pred,tf.float32))
init=tf.global_variables_initializer()
with tf.Session() as sess:
sess.run(init)
step=0
while step*batch_sizeif step%20==0:
print(sess.run(accuracy,feed_dict={x:batch_xs,y:batch_ys}))
step+=1
十八、自编码(Autoencoder)
神经网络的非监督学习
神经网络接收图像 → → 给图像打马赛克 → → 再还原
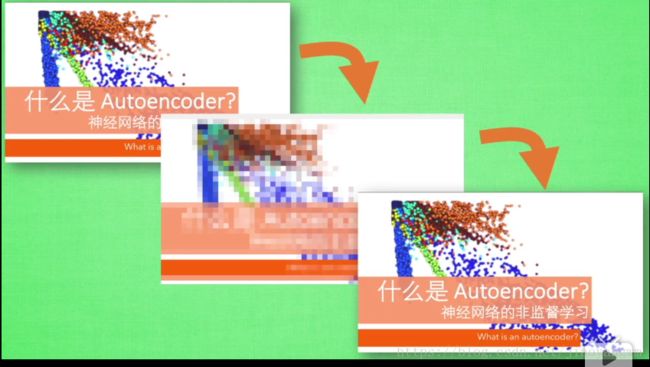
具体:

原有的图像被压缩,再用所储存的特征信息,经过解压获得原图。
如果神经元直接从获取的高清图像中取学习信息,会是一件很吃力的事情,所以通过特征提取,提取出能够重构出原图的主要信息,把缩减后的信息放入神经网络中进行学习,就可以更加轻松的学习。

输入:白色的X
输出:黑色的X
求取两者的误差,经过误差反向传递,逐步提升自编码准确性,中间的隐层就是能够提取出原数据最主要特征的神经元。
为什么说其是非监督学习:因为该过程只是用了X,而不用其标签,所以使非监督学习。
一般使用的时候只是用前半部分
因为前面已经学习了数据的精髓,我们只需要创建一个神经网络来学习这些精髓就好啦,可以达到和普通神经网络一样的效果,并且很高效。
编码器:前半部分
解码器:后半部分
自编码和PCA类似,可以提取出特征,可以给特征降维,自编码超越了PCA。
代码1:
import tensorflow as tf
from tensorflow.examples.tutorials.mnist import input_data
mnist=input_data.read_data_sets('MNIST_data',one_hot=True)
#hyperparameters
lr=0.1 #learning rate
training_iters=100000 #循环次数
batch_size=128
n_inputs=28 #MNIST data input(28*28),每次输入一行,即28个像素
n_steps=28 #总共28行,即输入28次28
n_hidden_unis=128 #隐层神经元
n_classes=10 #10个类
#tf Graph input
x=tf.placeholder(tf.float32,[None,n_steps,n_inputs])
y=tf.placeholder(tf.float32,[None,n_classes])
#Define weights
#weights:input weights+output weights
#进入RNN的cell之前,要经过一层hidden layer
#cell计算完结果后再输出到output hidden layer
#下面就定义cell前后的两层hidden layer,包括weights和biases
weights={
#(28,128)
'in':tf.Variable(tf.random_normal([n_inputs,n_hidden_unis])),
#(128,10)
'out':tf.Variable(tf.random_normal([n_hidden_unis,n_classes]))
}
biases={
#(128,)
'in':tf.Variable(tf.constant(0.1,shape=[n_hidden_unis,])),
#(10,)
'out':tf.Variable(tf.constant(0.1,shape=[n_classes,]))
}
def RNN(X,weights,biases):
#hidden layer for input to cell
#X(128 batch,28 steps,28 inputs),要转化成(128x128,28 inputs),因为要进行矩阵乘法
X=tf.reshape(X,[-1,n_inputs])
# 再变换为3维矩阵,(128 batch x 28 steps,128 hidden)
X_in=tf.matmul(X,weights['in'])+biases['in']
# 再变换为3维矩阵,(128 batch,28 steps,128 hidden)
X_in=tf.reshape(X_in,[-1,n_steps,n_hidden_unis])
#cell
#包含多少个节点,forget_bias:初始的forget定义为1,也就是不忘记,state_is_tuple:
lstm_cell=tf.nn.rnn_cell.BasicLSTMCell(n_hidden_unis,forget_bias=1.0,state_is_tuple=True)
#RNN每次计算一次都会保留一个state
#LSTM会保留两个state,lstm cell is divided into two parts(c_state,m_state),
#也就是主线的state(c_state),和分线的state(m_state),会包含在元组(tuple)里边
#state_is_tuple=True就是判定生成的是否为一个元组
# 初始state,全部为0,慢慢的累加记忆
_init_state=lstm_cell.zero_state(batch_size,dtype=tf.float32)
#outputs是一个list,每步的运算都会保存起来,time_majortime的时间点是不是在维度为1的地方,我们的放在第二个维度,28steps
outputs,states=tf.nn.dynamic_rnn(lstm_cell,X_in,initial_state=_init_state,time_major=False)
#hidden layer for outputs and final results
results=tf.matmul(states[1],weights['out'])+biases['out']
return results
pred=RNN(x,weights,biases)
#the error between prediction and real data
#labels是神经网络目标输出 , logistics是神经网络实际输出
cost=tf.reduce_mean(tf.nn.softmax_cross_entropy_with_logits(logits=pred,labels=y))
train_op=tf.train.AdamOptimizer(lr).minimize(cost)
correct_pred=tf.equal(tf.arg_max(pred,1),tf.arg_max(y,1))
accuracy=tf.reduce_mean(tf.cast(correct_pred,tf.float32))
init=tf.global_variables_initializer()
with tf.Session() as sess:
sess.run(init)
step=0
while step*batch_sizeif step%20==0:
print(sess.run(accuracy,feed_dict={x:batch_xs,y:batch_ys}))
step+=1
把梯度下降方法输入错了,cost总是很大,找了好久的问题。
结果:
Epoch: 0001 cost= 0.089918643
Epoch: 0002 cost= 0.082782879
Epoch: 0003 cost= 0.073581800
Epoch: 0004 cost= 0.069128580
Epoch: 0005 cost= 0.066503450
Epoch: 0006 cost= 0.066125013
Epoch: 0007 cost= 0.062507540
Epoch: 0008 cost= 0.059653457
Epoch: 0009 cost= 0.060695820
Epoch: 0010 cost= 0.059536964
Optimization Finished

代码2:
import tensorflow as tf
import matplotlib.pyplot as plt
from tensorflow.examples.tutorials.mnist import input_data
mnist = input_data.read_data_sets("MNIST_data/", one_hot=False)
learning_rate = 0.01
training_epochs = 20
batch_size = 256
display_step = 1
n_input = 784
X = tf.placeholder("float", [None, n_input])
#压缩过程,压缩到2个元素
n_hidden_1 = 128
n_hidden_2 = 64
n_hidden_3 = 10
n_hidden_4 = 2
weights = {
'encoder_h1': tf.Variable(tf.truncated_normal([n_input, n_hidden_1],)),
'encoder_h2': tf.Variable(tf.truncated_normal([n_hidden_1, n_hidden_2],)),
'encoder_h3': tf.Variable(tf.truncated_normal([n_hidden_2, n_hidden_3],)),
'encoder_h4': tf.Variable(tf.truncated_normal([n_hidden_3, n_hidden_4],)),
'decoder_h1': tf.Variable(tf.truncated_normal([n_hidden_4, n_hidden_3],)),
'decoder_h2': tf.Variable(tf.truncated_normal([n_hidden_3, n_hidden_2],)),
'decoder_h3': tf.Variable(tf.truncated_normal([n_hidden_2, n_hidden_1],)),
'decoder_h4': tf.Variable(tf.truncated_normal([n_hidden_1, n_input],)),
}
biases = {
'encoder_b1': tf.Variable(tf.random_normal([n_hidden_1])),
'encoder_b2': tf.Variable(tf.random_normal([n_hidden_2])),
'encoder_b3': tf.Variable(tf.random_normal([n_hidden_3])),
'encoder_b4': tf.Variable(tf.random_normal([n_hidden_4])),
'decoder_b1': tf.Variable(tf.random_normal([n_hidden_3])),
'decoder_b2': tf.Variable(tf.random_normal([n_hidden_2])),
'decoder_b3': tf.Variable(tf.random_normal([n_hidden_1])),
'decoder_b4': tf.Variable(tf.random_normal([n_input])),
}
def encoder(x):
layer_1 = tf.nn.sigmoid(tf.add(tf.matmul(x, weights['encoder_h1']),
biases['encoder_b1']))
layer_2 = tf.nn.sigmoid(tf.add(tf.matmul(layer_1, weights['encoder_h2']),
biases['encoder_b2']))
layer_3 = tf.nn.sigmoid(tf.add(tf.matmul(layer_2, weights['encoder_h3']),
biases['encoder_b3']))
# 为了便于编码层的输出,编码层随后一层不使用激活函数,输出的范围是无穷大
layer_4 = tf.add(tf.matmul(layer_3, weights['encoder_h4']),
biases['encoder_b4'])
return layer_4
def decoder(x):
layer_1 = tf.nn.sigmoid(tf.add(tf.matmul(x, weights['decoder_h1']),
biases['decoder_b1']))
layer_2 = tf.nn.sigmoid(tf.add(tf.matmul(layer_1, weights['decoder_h2']),
biases['decoder_b2']))
layer_3 = tf.nn.sigmoid(tf.add(tf.matmul(layer_2, weights['decoder_h3']),
biases['decoder_b3']))
layer_4 = tf.nn.sigmoid(tf.add(tf.matmul(layer_3, weights['decoder_h4']),
biases['decoder_b4']))
return layer_4
encoder_op = encoder(X)
decoder_op = decoder(encoder_op)
y_pred = decoder_op
y_true = X
cost = tf.reduce_mean(tf.pow(y_true - y_pred, 2))
optimizer = tf.train.AdamOptimizer(learning_rate).minimize(cost)
init=tf.global_variables_initializer()
with tf.Session() as sess:
sess.run(init)
total_batch = int(mnist.train.num_examples/batch_size)
for epoch in range(training_epochs):
for i in range(total_batch):
batch_xs, batch_ys = mnist.train.next_batch(batch_size) # max(x) = 1, min(x) = 0
_, c = sess.run([optimizer, cost], feed_dict={X: batch_xs})
if epoch % display_step == 0:
print("Epoch:", '%04d' % (epoch+1), "cost=", "{:.9f}".format(c))
print("Optimization Finished!")
#显示解压前的结果
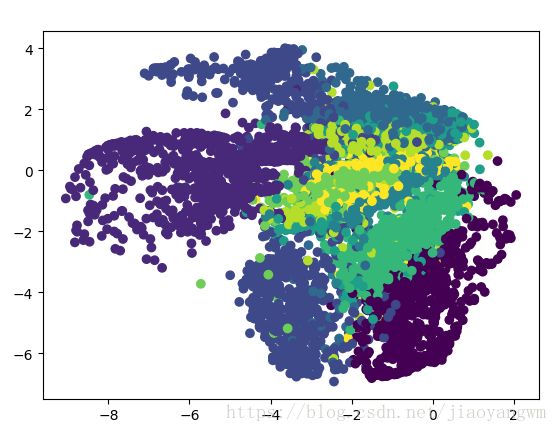
encoder_result = sess.run(encoder_op, feed_dict={X: mnist.test.images})
plt.scatter(encoder_result[:, 0], encoder_result[:, 1], c=mnist.test.labels)
# plt.colorbar()
plt.show()结果:
十九、tf.name_scope / tf.variable_scope
一、tf.name_scope
from __future__ import print_function
#__future__模块,把下一个新版本的特性导入到当前版本,于是我们就可以在当前版本中测试一些新版本的特性
import tensorflow as tf
tf.set_random_seed(1)
with tf.name_scope("a_name_scope"): #name_scope的名字为"a_name_scope"
initializer=tf.constant_initializer(value=1)
#两种创建variable的途径
# tf.get_variable要定义一个initializer
# name_scope 对tf.get_variable无效
var1=tf.get_variable(name='var1',shape=[1],dtype=tf.float32,initializer=initializer)
var2=tf.Variable(name='var2', initial_value=[2], dtype=tf.float32)
var21 = tf.Variable(name='var2', initial_value=[2.1], dtype=tf.float32)
var22 = tf.Variable(name='var2', initial_value=[2.2], dtype=tf.float32)
with tf.Session() as sess:
sess.run(tf.global_variables_initializer())
#分别打印varibale的名字和值
print(var1.name)
print(sess.run(var1))
print(var2.name)
print(sess.run(var2))
print(var21.name)
print(sess.run(var21))
print(var22.name)
print(sess.run(var22))
结果:
var1:0
[ 1.]
a_name_scope/var2:0
[ 2.]
a_name_scope/var2_1:0
[ 2.0999999]
a_name_scope/var2_2:0
[ 2.20000005]
二、tf.variable_scope
from __future__ import print_function
#__future__模块,把下一个新版本的特性导入到当前版本,于是我们就可以在当前版本中测试一些新版本的特性
import tensorflow as tf
tf.set_random_seed(1)
with tf.variable_scope("a_variable_scope") as scope:
initializer=tf.constant_initializer(value=3)
var3=tf.get_variable(name="var3",shape=[1],dtype=tf.float32,initializer=initializer)
var4=tf.Variable(name='var4',initial_value=[4],dtype=tf.float32)
#可以重复调用之前创造的变量,但是tf.Variable是不可行的,只能重新创建一个
#a_variable_scope/var4:0
# [ 4.]
# a_variable_scope/var4_1:0
# [ 4.]
#var4_reuse=tf.Variable(name='var4',initial_value=[4],dtype=tf.float32)
#使用tf.get_variable重复调用var3,要先强调后面的要重复利用
#scope.reuse_variables()会先再前面搜索是否已经存在,重复利用得到的两个变量是同一个变量
scope.reuse_variables()
var3_reuse=tf.get_variable(name='var3')
with tf.Session() as sess:
sess.run(tf.global_variables_initializer())
#分别打印varibale的名字和值
print(var3.name)
print(sess.run(var3))
print(var4.name)
print(sess.run(var4))
print(var3_reuse.name)
print(sess.run(var3_reuse))
结果:
a_variable_scope/var3:0
[ 3.]
a_variable_scope/var4:0
[ 4.]
a_variable_scope/var3:0
[ 3.]为什么要用tf.variable_scope来定义重复利用?
——RNN会经常用到。
二十、批标准化——Batch Normalization
将分散的数据进行规范化,利于机器学习的学习。
数据分布会对神经网络的学习产生影响,
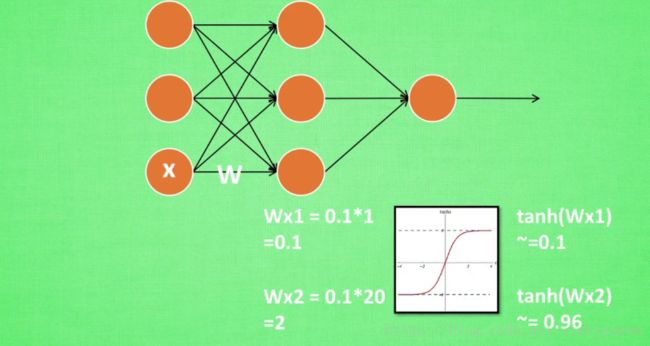
1)输入X1=1,权值为W=0.1,第二层接收到的就是 Wx1=0.1∗1=0.1 W x 1 = 0.1 ∗ 1 = 0.1
2)输入X2=20,权值为W=0.1,第二层接收到的就是 Wx1=0.1∗20=2 W x 1 = 0.1 ∗ 20 = 2
3)添加激活函数:tanh, tanh(x1)=0.1 t a n h ( x 1 ) = 0.1 , tanh(x2)=0.96 t a n h ( x 2 ) = 0.96 ,x2已经接近饱和了,无论之后x怎么扩大,tanh函数的输出值都不会变化很大,也就是神经网络在初始阶段已经不对那些过大的x敏感了,所以要做预处理,使得输入的范围规范化,集中在激励函数的敏感部分。
但是这种情况不仅仅发生在输入层,同样发生在隐藏层,那么可以对隐藏层的输入进行标准化吗?
答案是肯定的,这也叫做batch normalization
将数据Data进行分批,分批进行随机梯度下降,并且在每批数据进行前向传递的时候,对每一层都进行Normaliation。
x经过神经网络的前向传播过程:
x->全连接层->激活函数->全连接层
添加Batch Normalization:
x->全连接层->Batch Normalization->激活函数->全连接层
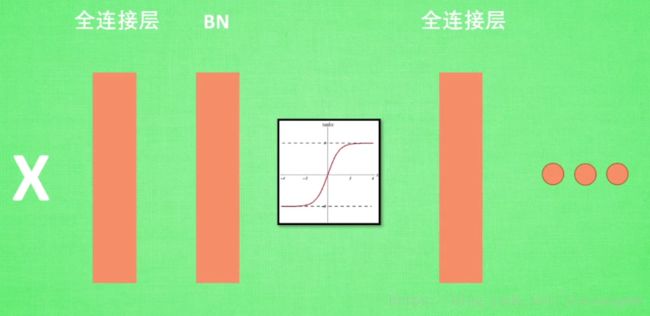
输入激励函数的值对计算结果很重要,所以要将数据规范化到激活函数的敏感区域,才能更有效的向前传递。
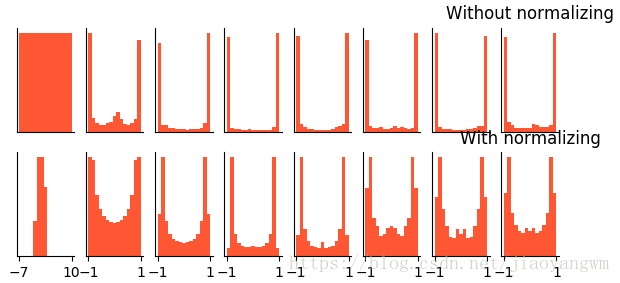
下图展示了未进行BN 和进行BN后的数据的分布:

激活后的分布如下:

未进行BN的数据激活之后大多分布在饱和阶段,也就是-1和1的居多,BN之后的数据进行激活的结果基本均匀分布,对神经网络的学习更加有价值。
Batch Normalization:包含正向和反向两个过程

反向操作:将BN后的数据进行扩展和平移,就是为了让神经网络自己学习去学习使用和修改扩展参数 γ γ ,和平移参数 β β ,让神经网络自己学习BN到底有没有作用,如果没有作用的话,就用上述两个参数进行抵消BN的一些操作。
神经网络训练到最后,数据的分布图

有BN标准化:让每一层的值在有效的范围内传递下去,
无BN标准化:缺失了对数据的敏感性,不能有效的传递每一层的信息
详细解释:

上面一行是未进行BN的过程:
下面一行是对每一层都进行BN的过程:
Tensorflow
"""
Build two networks.
1. Without batch normalization
2. With batch normalization
Run tests on these two networks.
"""
# 23 Batch Normalization
import numpy as np
import tensorflow as tf
import matplotlib.pyplot as plt
ACTIVATION = tf.nn.tanh
N_LAYERS = 7
N_HIDDEN_UNITS = 30
def fix_seed(seed=1):
# reproducible
np.random.seed(seed)
tf.set_random_seed(seed)
def plot_his(inputs, inputs_norm):
# plot histogram for the inputs of every layer
for j, all_inputs in enumerate([inputs, inputs_norm]):
for i, input in enumerate(all_inputs):
plt.subplot(2, len(all_inputs), j*len(all_inputs)+(i+1))
plt.cla()
if i == 0:
the_range = (-7, 10)
else:
the_range = (-1, 1)
plt.hist(input.ravel(), bins=15, range=the_range, color='#FF5733')
plt.yticks(())
if j == 1:
plt.xticks(the_range)
else:
plt.xticks(())
ax = plt.gca()
ax.spines['right'].set_color('none')
ax.spines['top'].set_color('none')
plt.title("%s normalizing" % ("Without" if j == 0 else "With"))
plt.draw()
plt.pause(0.01)
def built_net(xs, ys, norm):
def add_layer(inputs, in_size, out_size, activation_function=None, norm=False):
# weights and biases (bad initialization for this case)
Weights = tf.Variable(tf.random_normal([in_size, out_size], mean=0., stddev=1.))
biases = tf.Variable(tf.zeros([1, out_size]) + 0.1)
# fully connected product
Wx_plus_b = tf.matmul(inputs, Weights) + biases
# normalize fully connected product
if norm:
# Batch Normalize
# 首先得到整批数据的均值和方差,在batch的维度上
#注意!如果是test,要固定fc_mean, fc_var两个参数,不使用tf.nn.moments
#因为测试的时候不是在一个batch中测试的,不用求它的方差均值了
fc_mean, fc_var = tf.nn.moments(
Wx_plus_b,
axes=[0], # the dimension you wanna normalize, here [0] for batch
# for image, you wanna do [0, 1, 2] for [batch, height, width] but not channel
)
scale = tf.Variable(tf.ones([out_size]))
shift = tf.Variable(tf.zeros([out_size]))
epsilon = 0.001
# apply moving average for mean and var when train on batch
ema = tf.train.ExponentialMovingAverage(decay=0.5)
def mean_var_with_update():
ema_apply_op = ema.apply([fc_mean, fc_var])
with tf.control_dependencies([ema_apply_op]):
return tf.identity(fc_mean), tf.identity(fc_var)
mean, var = mean_var_with_update()
Wx_plus_b = tf.nn.batch_normalization(Wx_plus_b, mean, var, shift, scale, epsilon)
# similar with this two steps:
# Wx_plus_b = (Wx_plus_b - fc_mean) / tf.sqrt(fc_var + 0.001)
# Wx_plus_b = Wx_plus_b * scale + shift
# activation
if activation_function is None:
outputs = Wx_plus_b
else:
outputs = activation_function(Wx_plus_b)
return outputs
fix_seed(1)
#对输入层做normalization
if norm:
# BN for the first input
fc_mean, fc_var = tf.nn.moments(
xs,
axes=[0],
)
scale = tf.Variable(tf.ones([1]))
shift = tf.Variable(tf.zeros([1]))
epsilon = 0.001
# apply moving average for mean and var when train on batch
ema = tf.train.ExponentialMovingAverage(decay=0.5)
def mean_var_with_update():
ema_apply_op = ema.apply([fc_mean, fc_var])
with tf.control_dependencies([ema_apply_op]):
return tf.identity(fc_mean), tf.identity(fc_var)
mean, var = mean_var_with_update()
xs = tf.nn.batch_normalization(xs, mean, var, shift, scale, epsilon)
# record inputs for every layer
layers_inputs = [xs]
# build hidden layers
for l_n in range(N_LAYERS):
layer_input = layers_inputs[l_n]
in_size = layers_inputs[l_n].get_shape()[1].value
output = add_layer(
layer_input, # input
in_size, # input size
N_HIDDEN_UNITS, # output size
ACTIVATION, # activation function
norm, # normalize before activation
)
layers_inputs.append(output) # add output for next run
# build output layer
prediction = add_layer(layers_inputs[-1], 30, 1, activation_function=None)
cost = tf.reduce_mean(tf.reduce_sum(tf.square(ys - prediction), reduction_indices=[1]))
train_op = tf.train.GradientDescentOptimizer(0.001).minimize(cost)
return [train_op, cost, layers_inputs]
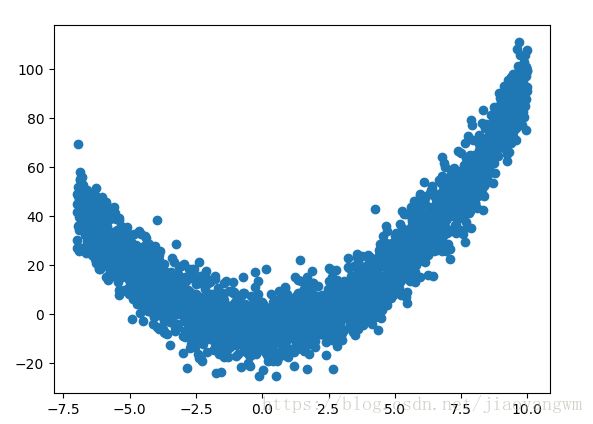
# make up data
fix_seed(1)
x_data = np.linspace(-7, 10, 2500)[:, np.newaxis]
np.random.shuffle(x_data)
noise = np.random.normal(0, 8, x_data.shape)
y_data = np.square(x_data) - 5 + noise
# plot input data
plt.scatter(x_data, y_data)
plt.show()
xs = tf.placeholder(tf.float32, [None, 1]) # [num_samples, num_features]
ys = tf.placeholder(tf.float32, [None, 1])
train_op, cost, layers_inputs = built_net(xs, ys, norm=False) # without BN
train_op_norm, cost_norm, layers_inputs_norm = built_net(xs, ys, norm=True) # with BN
sess = tf.Session()
if int((tf.__version__).split('.')[1]) < 12 and int((tf.__version__).split('.')[0]) < 1:
init = tf.initialize_all_variables()
else:
init = tf.global_variables_initializer()
sess.run(init)
# record cost
cost_his = []
cost_his_norm = []
record_step = 5
plt.ion()
plt.figure(figsize=(7, 3))
for i in range(250):
if i % 50 == 0:
# plot histogram
all_inputs, all_inputs_norm = sess.run([layers_inputs, layers_inputs_norm], feed_dict={xs: x_data, ys: y_data})
plot_his(all_inputs, all_inputs_norm)
# train on batch
sess.run([train_op, train_op_norm], feed_dict={xs: x_data[i*10:i*10+10], ys: y_data[i*10:i*10+10]})
if i % record_step == 0:
# record cost
cost_his.append(sess.run(cost, feed_dict={xs: x_data, ys: y_data}))
cost_his_norm.append(sess.run(cost_norm, feed_dict={xs: x_data, ys: y_data}))
plt.ioff()
plt.figure()
plt.plot(np.arange(len(cost_his))*record_step, np.array(cost_his), label='no BN') # no norm
plt.plot(np.arange(len(cost_his))*record_step, np.array(cost_his_norm), label='BN') # norm
plt.legend()
plt.show()
每50步变化一次的分布情况,
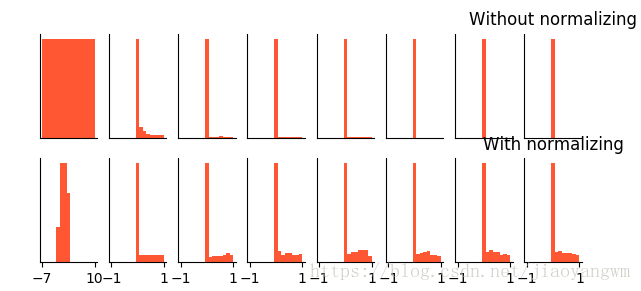
没有BN的情况:第一层还有分布,后面的基本都变为0。
输入(-7,10)
有BN的情况:基本上都可以很好的分布在大于0的区间。
使用的relu的激活函数:
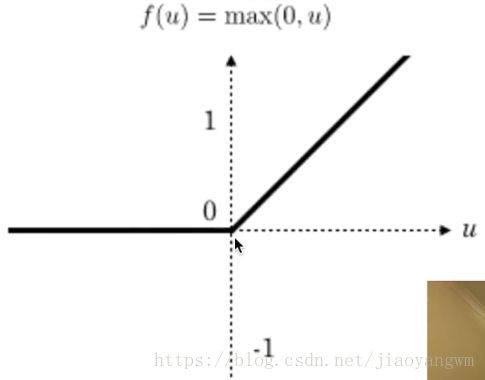
误差曲线:
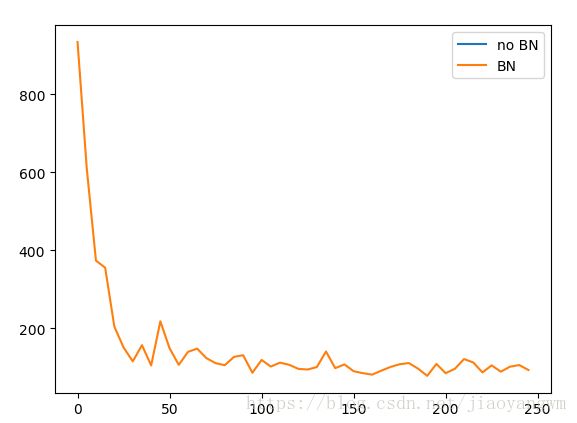
no BN的误差曲线都没有,训练到最后,所有的神经元都不起作用了,说明用relu函数后,都不起作用了。
tanh
数据分布:
没有BN:输入值基本趋于饱和
有BN:大部分值都在没有饱和的区间,也就是激活的状态
误差曲线:

no BN:有误差曲线了
BN:误差会一直减小,训练效果更好
二十一、可视化梯度
import tensorflow as tf
import numpy as np
import matplotlib.pylab as plt
from mpl_toolkits.mplot3d import Axes3D
LR=0.1
#模型有两个参数
REAL_PARAMS=[1.2,2.5] #生成模型的真实参数
INIT_PARAMS=[[5,4], #初始化的数据
[5,1],
[2,4.5]][2]
x=np.linspace(-1,1,200,dtype=np.float32)
# test 1
y_fun=lambda a,b:a*x+b #生成真实数据
tf_y_fun=lambda a,b:a*x+b #用tensorflow来拟合a和b这两个参数
noise=np.random.rand(200)/10
y=y_fun(*REAL_PARAMS)+noise #参数使用REAL_PARAMS
# plt.scatter(x,y)
# plt.show()
a,b=[tf.Variable(initial_value=p,dtype=tf.float32) for p in INIT_PARAMS]
pred=tf_y_fun(a,b)
mse=tf.reduce_mean(tf.square(y-pred))
train_op=tf.train.GradientDescentOptimizer(LR).minimize(mse)
a_list,b_list,cost_list=[],[],[]
with tf.Session() as sess:
sess.run(tf.global_variables_initializer())
for t in range(400):
a_,b_,mes_=sess.run([a,b,mse])
#record parameters
a_list.append(a_)
b_list.append(b_)
cost_list.append(mes_)
#training
result,_=sess.run([pred,train_op])
# visualization codes:
print('a=', a_, 'b=', b_)
plt.figure(1)
plt.scatter(x, y, c='b') # plot data
plt.plot(x, result, 'r-', lw=2) # plot line fitting
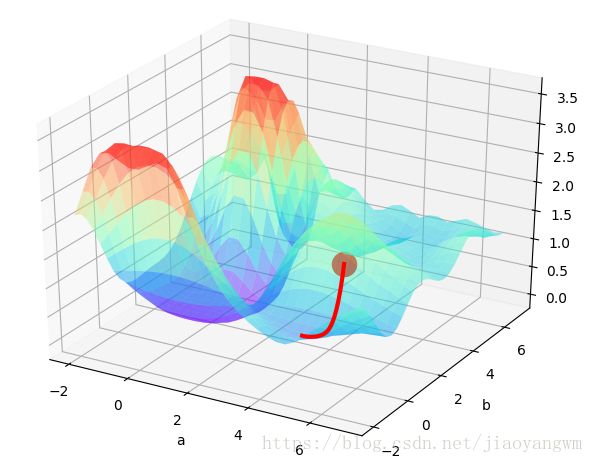
# 3D cost figure
fig = plt.figure(2); ax = Axes3D(fig)
a3D, b3D = np.meshgrid(np.linspace(-2, 7, 30), np.linspace(-2, 7, 30)) # parameter space
cost3D = np.array([np.mean(np.square(y_fun(a_, b_) - y)) for a_, b_ in zip(a3D.flatten(), b3D.flatten())]).reshape(a3D.shape)
ax.plot_surface(a3D, b3D, cost3D, rstride=1, cstride=1, cmap=plt.get_cmap('rainbow'), alpha=0.5)
ax.scatter(a_list[0], b_list[0], zs=cost_list[0], s=300, c='r') # initial parameter place
ax.set_xlabel('a'); ax.set_ylabel('b')
ax.plot(a_list, b_list, zs=cost_list, zdir='z', c='r', lw=3) # plot 3D gradient descent
plt.show()
结果:
a= 1.19776 b= 2.54675

从初始点向误差小的方向下降
跨步太大,路径波动太大,出现震荡。
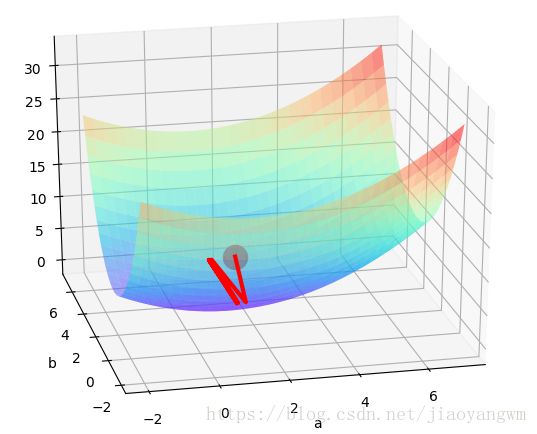
并且没有办法很好的拟合到原始数据

如何使用Tensorflow进行调参:
局部最优:和初始值关系较大,会滑到局部最小值
初始点1:
LR=0.1
#模型有两个参数
REAL_PARAMS=[1.2,2.5] #生成模型的真实参数
INIT_PARAMS=[[5,4], #初始化的数据
[5,1],
[2,4.5]][2]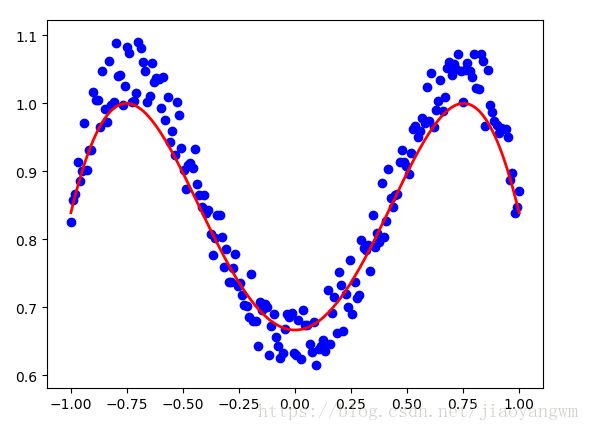

初始点2:改变初始值
#模型有两个参数
REAL_PARAMS=[1.2,2.5] #生成模型的真实参数
INIT_PARAMS=[[5,4], #初始化的数据
[5,1],
[2,4.5]][1]
二十二:迁移学习——Transfer learning
站在巨人的肩膀上,借鉴已有的模型。
不再训练前面的参数,也就是固定住模型的理解能力,将输出层替换为需要的功能。
节约计算资源
Tensorflow实现:
利用16层的VGGNet,拆掉其分类的部分,补上用回归的。
区分猫和老虎。
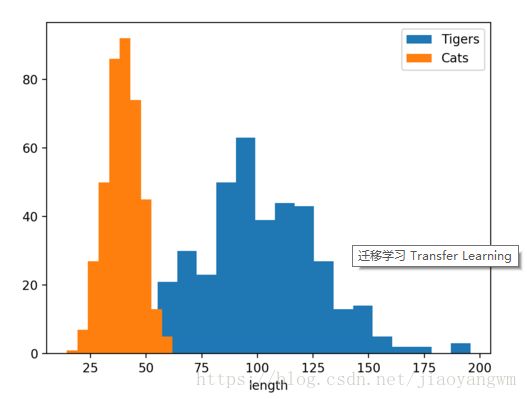
原本为分类,现在做成回归,就是做些假的数据,包括猫和老虎自身的长度,
我们就来迁移一个图片分类的 CNN (VGG). 这个 VGG 在1000个类别中训练过. 我们提取这个 VGG 前面的 Conv layers, 重新组建后面的 fully connected layers, 让它做一个和分类完全不相干的事. 我们在网上下载那1000个分类数据中的猫和老虎的图片, 然后伪造一些猫和老虎长度的数据. 最后做到让迁移后的网络分辨出猫和老虎的长度 (regressor).
因为现在我们不是预测分类结果了, 所以我伪造了一些体长的数据. 老虎通常要比猫长, 所以它们的 distribution 就差不多是下面这种结构(单位cm).
数据下载:
VGG16.npy
迁移学习改动的地方:
为了做迁移学习, 对他的 tensorflow VGG16 代码进行了改写. 保留了所有 Conv 和 pooling 层, 将后面的所有 fc 层拆了, 改成可以被 train 的两层, 输出一个数字, 这个数字代表了这只猫或老虎的长度.
"""
This is a simple example of transfer learning using VGG.
Fine tune a CNN from a classifier to regressor.
Generate some fake data for describing cat and tiger length.
Fake length setting:
Cat - Normal distribution (40, 8)
Tiger - Normal distribution (100, 30)
The VGG model and parameters are adopted from:
https://github.com/machrisaa/tensorflow-vgg
Learn more, visit my tutorial site: [莫烦Python](https://morvanzhou.github.io)
"""
from urllib.request import urlretrieve
import os
import numpy as np
import tensorflow as tf
import skimage.io
import skimage.transform
import matplotlib.pyplot as plt
def download(): # download tiger and kittycat image
categories = ['tiger', 'kittycat']
for category in categories:
os.makedirs('transfer_learning/data/%s' % category, exist_ok=True)
with open('transfer_learning/model/imagenet_%s.txt' % category, 'r') as file:
urls = file.readlines()
n_urls = len(urls)
for i, url in enumerate(urls):
try:
urlretrieve(url.strip(), 'transfer_learning/data/%s/%s' % (category, url.strip().split('/')[-1]))
print('%s %i/%i' % (category, i, n_urls))
except:
print('%s %i/%i' % (category, i, n_urls), 'no image')
def load_img(path):
img = skimage.io.imread(path)
img = img / 255.0
# print "Original Image Shape: ", img.shape
# we crop image from center
short_edge = min(img.shape[:2])
yy = int((img.shape[0] - short_edge) / 2)
xx = int((img.shape[1] - short_edge) / 2)
crop_img = img[yy: yy + short_edge, xx: xx + short_edge]
# resize to 224, 224
resized_img = skimage.transform.resize(crop_img, (224, 224))[None, :, :, :] # shape [1, 224, 224, 3]
return resized_img
def load_data():
imgs = {'tiger': [], 'kittycat': []}
for k in imgs.keys():
dir = 'transfer_learning/data/' + k
for file in os.listdir(dir):
if not file.lower().endswith('.jpg'):
continue
try:
resized_img = load_img(os.path.join(dir, file))
except OSError:
continue
imgs[k].append(resized_img) # [1, height, width, depth] * n
if len(imgs[k]) == 400: # only use 400 imgs to reduce my memory load
break
# fake length data for tiger and cat
tigers_y = np.maximum(20, np.random.randn(len(imgs['tiger']), 1) * 30 + 100)
cat_y = np.maximum(10, np.random.randn(len(imgs['kittycat']), 1) * 8 + 40)
return imgs['tiger'], imgs['kittycat'], tigers_y, cat_y
class Vgg16:
vgg_mean = [103.939, 116.779, 123.68]
def __init__(self, vgg16_npy_path=None, restore_from=None):
# pre-trained parameters
try:
self.data_dict = np.load(vgg16_npy_path, encoding='latin1').item()
except FileNotFoundError:
print('Please download VGG16 parameters at here https://mega.nz/#!YU1FWJrA!O1ywiCS2IiOlUCtCpI6HTJOMrneN-Qdv3ywQP5poecM')
self.tfx = tf.placeholder(tf.float32, [None, 224, 224, 3])
self.tfy = tf.placeholder(tf.float32, [None, 1])
# Convert RGB to BGR
red, green, blue = tf.split(axis=3, num_or_size_splits=3, value=self.tfx * 255.0)
bgr = tf.concat(axis=3, values=[
blue - self.vgg_mean[0],
green - self.vgg_mean[1],
red - self.vgg_mean[2],
])
# pre-trained VGG layers are fixed in fine-tune
conv1_1 = self.conv_layer(bgr, "conv1_1")
conv1_2 = self.conv_layer(conv1_1, "conv1_2")
pool1 = self.max_pool(conv1_2, 'pool1')
conv2_1 = self.conv_layer(pool1, "conv2_1")
conv2_2 = self.conv_layer(conv2_1, "conv2_2")
pool2 = self.max_pool(conv2_2, 'pool2')
conv3_1 = self.conv_layer(pool2, "conv3_1")
conv3_2 = self.conv_layer(conv3_1, "conv3_2")
conv3_3 = self.conv_layer(conv3_2, "conv3_3")
pool3 = self.max_pool(conv3_3, 'pool3')
conv4_1 = self.conv_layer(pool3, "conv4_1")
conv4_2 = self.conv_layer(conv4_1, "conv4_2")
conv4_3 = self.conv_layer(conv4_2, "conv4_3")
pool4 = self.max_pool(conv4_3, 'pool4')
conv5_1 = self.conv_layer(pool4, "conv5_1")
conv5_2 = self.conv_layer(conv5_1, "conv5_2")
conv5_3 = self.conv_layer(conv5_2, "conv5_3")
pool5 = self.max_pool(conv5_3, 'pool5')
# detach original VGG fc layers and
# reconstruct your own fc layers serve for your own purpose
self.flatten = tf.reshape(pool5, [-1, 7*7*512])
self.fc6 = tf.layers.dense(self.flatten, 256, tf.nn.relu, name='fc6')
self.out = tf.layers.dense(self.fc6, 1, name='out')
self.sess = tf.Session()
if restore_from:
saver = tf.train.Saver()
saver.restore(self.sess, restore_from)
else: # training graph
self.loss = tf.losses.mean_squared_error(labels=self.tfy, predictions=self.out)
self.train_op = tf.train.RMSPropOptimizer(0.001).minimize(self.loss)
self.sess.run(tf.global_variables_initializer())
def max_pool(self, bottom, name):
return tf.nn.max_pool(bottom, ksize=[1, 2, 2, 1], strides=[1, 2, 2, 1], padding='SAME', name=name)
def conv_layer(self, bottom, name):
with tf.variable_scope(name): # CNN's filter is constant, NOT Variable that can be trained
conv = tf.nn.conv2d(bottom, self.data_dict[name][0], [1, 1, 1, 1], padding='SAME')
lout = tf.nn.relu(tf.nn.bias_add(conv, self.data_dict[name][1]))
return lout
def train(self, x, y):
loss, _ = self.sess.run([self.loss, self.train_op], {self.tfx: x, self.tfy: y})
return loss
def predict(self, paths):
fig, axs = plt.subplots(1, 2)
for i, path in enumerate(paths):
x = load_img(path)
length = self.sess.run(self.out, {self.tfx: x})
axs[i].imshow(x[0])
axs[i].set_title('Len: %.1f cm' % length)
axs[i].set_xticks(()); axs[i].set_yticks(())
plt.show()
def save(self, path='ransfer_learning/model/transfer_learn'):
saver = tf.train.Saver()
saver.save(self.sess, path, write_meta_graph=False)
def train():
tigers_x, cats_x, tigers_y, cats_y = load_data()
# plot fake length distribution
plt.hist(tigers_y, bins=20, label='Tigers')
plt.hist(cats_y, bins=10, label='Cats')
plt.legend()
plt.xlabel('length')
plt.show()
xs = np.concatenate(tigers_x + cats_x, axis=0)
ys = np.concatenate((tigers_y, cats_y), axis=0)
vgg = Vgg16(vgg16_npy_path='transfer_learning/vgg16.npy')
print('Net built')
for i in range(100):
b_idx = np.random.randint(0, len(xs), 6)
train_loss = vgg.train(xs[b_idx], ys[b_idx])
print(i, 'train loss: ', train_loss)
vgg.save('transfer_learning/model/transfer_learn') # save learned fc layers
def eval():
vgg = Vgg16(vgg16_npy_path='transfer_learning/vgg16.npy',
restore_from='transfer_learning/model/transfer_learn')
vgg.predict(
['transfer_learning/data/kittycat/000129037.jpg', 'transfer_learning/data/tiger/391412.jpg'])
if __name__ == '__main__':
download()
train()
eval()