OpenCV学习笔记: 快速入门例程
先期基础:
————————————————————————————
Main函数参数argc,argv说明
C/C++语言中的main函数,经常带有参数argc,argv,如下:
int main(int argc, char** argv)
int main(int argc, char* argv[])
这两个参数的作用: argc 是指命令行输入参数的个数(以空白符分隔) argv存储了所有的命令行参数 假如你的程序是hello.exe,如果在命令行运行该程序,(首先应该在命令行下用 cd 命令进入到 hello.exe 文件所在目录) 运行命令为:
hello.exe Shiqi Yu
那么,argc的值是 3,argv[0]是"hello.exe",argv[1]是"Shiqi",argv[2]是"Yu"。
OpenCV模块
- opencv_core 包含核心功能,尤其是底层数据结构和算法函数
- opencv_imgproc 包含图像处理函数
- opencv_highgui 包含读写图像及视频的函数,以及操作图形用户界面函数
- opencv_features2d 包含兴趣点检测子、描述子以及兴趣点匹配框架
- opencv_calib3d 包含相机标定,双目几何估算以及立体视觉函数
- opencv_video 包含运动估算、特征跟踪以及前景提取函数与类
- opencv_objectect 包括物体检测函数,如脸部与行人检测
(1) 函数名:
cvActionTargetMod(...)
Action = 核心功能(core functionality) (e.g. set, create)Target = 目标图像区域(target image area) (e.g. contour, polygon)Mod = (可选的)调整语(optional modifiers) (e.g. argument type)
(2) 矩阵数据类型:
CV_
S = 符号整型U = 无符号整型F = 浮点型E.g. : CV_8UC1 是指一个8位无符号整型单通道矩阵,CV_32FC2是指一个32位浮点型双通道矩阵.
(3) 图像数据类型:
IPL_DEPTH_
E.g.: IPL_DEPTH_8U 图像像素数据是8位无符号整型.IPL_DEPTH_32F图像像素数据是32位浮点型.
(4) 头文件:
#include
#include
#include
#include
#include
指向const对象的指针:
若指针指向const对象,则不允许使用指针来改变其所指的const值。
为了保证这个特性,C++强制要求指向const对象的指针也必须具有const特性
const double * cptr;(
const char *pstrImageName = "c:\\Baboon.jpg";这里的cptr是一个指向double类型const对象的指针,const限定了cptr指针所指向的对象类型,而并非cptr本身,即cptr本身并不是const。在定义时不需要对它进行初始化,若需要允许给cptr重新赋值,使其指向另一个const对象,但不能通过cptr修改其所指向对象的值。
在实际应用中,指向const的指针常用作函数的形参,将形参定义为指向const的指针以确保传递给函数的实际对象在函数中不因为形参而被修改。
第一个例程:很简单,图像的读取和显示
#include "stdafx.h"
#include
#include
using namespace std;
using namespace cv;
int _tmain(int argc, _TCHAR* argv[])
{
string imagename="c:\\lena.jpg"; //要用绝对路径才行
//const char* imagename = "c:\\lena.jpg";
//从文件中读入图像
Mat img = imread(imagename);
//如果读入图像失败
if(img.empty())
{
fprintf(stderr, "Can not load image %s\n", imagename);
return -1;
}
//显示图像
imshow("image", img);
//此函数等待按键,按键盘任意键就返回
waitKey();
return 0;
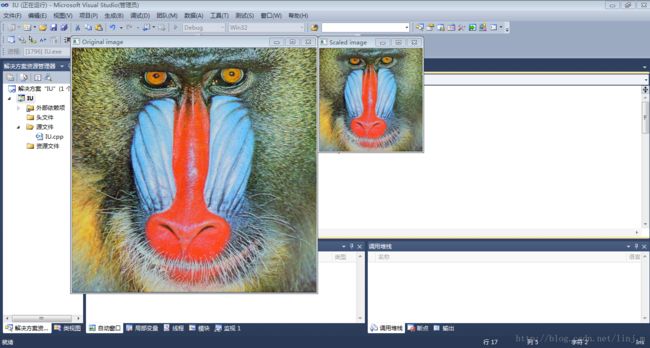
} //功能:图像缩放实现
#include
using namespace std;
//隐藏控制台窗口
#pragma comment(linker, "/subsystem:\"windows\" /entry:\"mainCRTStartup\"")
int main()
{
const char *pstrImageName = "c:\\Baboon.jpg";
const char *pstrSaveImageName = "结果图.jpg";
const char *pstrWindowsSrcTitle = "Original image";
const char *pstrWindowsDstTitle = "Scaled image";
double fScale = 0.422; //缩放倍数
CvSize czSize; //目标图像尺寸
//从文件中读取图像
IplImage *pSrcImage = cvLoadImage(pstrImageName, CV_LOAD_IMAGE_UNCHANGED);
IplImage *pDstImage = NULL;
//计算目标图像大小
czSize.width = pSrcImage->width * fScale;
czSize.height = pSrcImage->height * fScale;
//创建图像并缩放
pDstImage = cvCreateImage(czSize, pSrcImage->depth, pSrcImage->nChannels);
cvResize(pSrcImage, pDstImage, CV_INTER_AREA);
//创建窗口
cvNamedWindow(pstrWindowsSrcTitle, CV_WINDOW_AUTOSIZE);
cvNamedWindow(pstrWindowsDstTitle, CV_WINDOW_AUTOSIZE);
//在指定窗口中显示图像
cvShowImage(pstrWindowsSrcTitle, pSrcImage);
cvShowImage(pstrWindowsDstTitle, pDstImage);
//等待按键事件
cvWaitKey();
//保存图片
cvSaveImage(pstrSaveImageName, pDstImage);
cvDestroyWindow(pstrWindowsSrcTitle);
cvDestroyWindow(pstrWindowsDstTitle);
cvReleaseImage(&pSrcImage);
cvReleaseImage(&pDstImage);
return 0;
} 
函数介绍
cvResize 函数功能:图像大小变换
函数原型:
void cvResize(
const CvArr* src,
CvArr* dst,
int interpolation=CV_INTER_LINEAR
);
函数说明:
第一个参数表示输入图像。第二个参数表示输出图像。第三个参数表示插值方法,可以有以下四种:
CV_INTER_NN - 最近邻插值,
CV_INTER_LINEAR - 双线性插值 (缺省使用)
CV_INTER_AREA - 使用象素关系重采样。当图像缩小时候,该方法可以避免波纹出现。当图像放大时,类似于 CV_INTER_NN 方法..
CV_INTER_CUBIC - 立方插值.
cvCreateImage 函数功能:创建图像
函数原型:
IplImage* cvCreateImage(CvSize size, int depth, int channels);
函数说明:
第一个参数表示图像的大小。第二个参数表示图像的深度,可以为IPL_DEPTH_8U,IPL_DEPTH_16U等等。第三个参数表示图像的通道数。
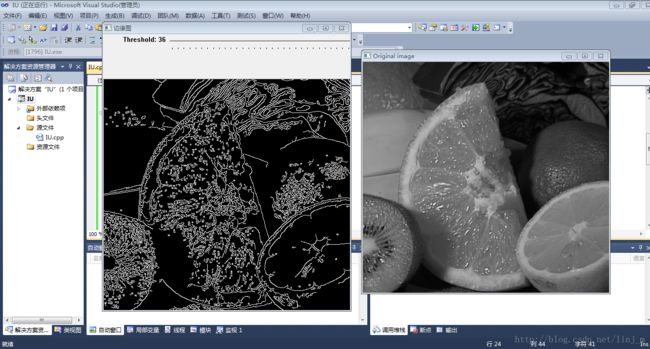
//图像的Canny边缘检测
#include
using namespace std;
#pragma comment(linker, "/subsystem:\"windows\" /entry:\"mainCRTStartup\"")
IplImage *g_pSrcImage, *g_pCannyImg;
const char *pstrWindowsCannyTitle = "边缘图";
//cvCreateTrackbar的回调函数
void on_trackbar(int threshold)
{
//canny边缘检测
cvCanny(g_pSrcImage, g_pCannyImg, threshold, threshold * 3, 3);
cvShowImage(pstrWindowsCannyTitle, g_pCannyImg);
}
int main()
{
const char *pstrImageName = "C:\\Fruits.jpg";
const char *pstrWindowsSrcTitle = "Original image";
const char *pstrWindowsToolBar = "Threshold";
//从文件中载入图像的灰度图CV_LOAD_IMAGE_GRAYSCALE - 灰度图
g_pSrcImage = cvLoadImage(pstrImageName, CV_LOAD_IMAGE_GRAYSCALE);
g_pCannyImg = cvCreateImage(cvGetSize(g_pSrcImage), IPL_DEPTH_8U, 1);
//创建窗口
cvNamedWindow(pstrWindowsSrcTitle, CV_WINDOW_AUTOSIZE);
cvNamedWindow(pstrWindowsCannyTitle, CV_WINDOW_AUTOSIZE);
//创建滑动条
int nThresholdEdge = 1;
cvCreateTrackbar(pstrWindowsToolBar, pstrWindowsCannyTitle, &nThresholdEdge, 50, on_trackbar);
//在指定窗口中显示图像
cvShowImage(pstrWindowsSrcTitle, g_pSrcImage);
on_trackbar(1);
//等待按键事件
cvWaitKey();
cvDestroyWindow(pstrWindowsSrcTitle);
cvDestroyWindow(pstrWindowsCannyTitle);
cvReleaseImage(&g_pSrcImage);
cvReleaseImage(&g_pCannyImg);
return 0;
}
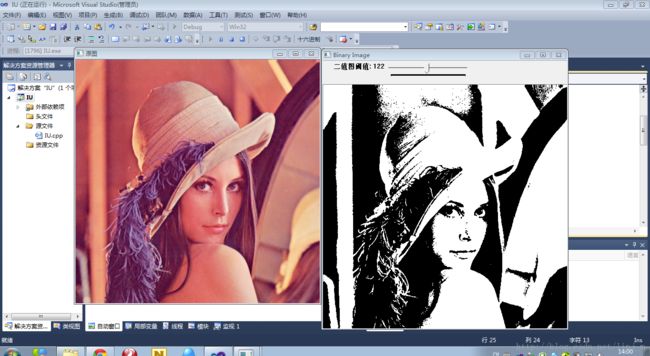
//图像的二值化
#include
using namespace std;
#pragma comment(linker, "/subsystem:\"windows\" /entry:\"mainCRTStartup\"")
IplImage *g_pGrayImage = NULL;
IplImage *g_pBinaryImage = NULL;
const char *pstrWindowsBinaryTitle = "Binary Image";
void on_trackbar(int pos)
{
// 转为二值图
cvThreshold(g_pGrayImage, g_pBinaryImage, pos, 255, CV_THRESH_BINARY);
// 显示二值图
cvShowImage(pstrWindowsBinaryTitle, g_pBinaryImage);
}
int main( int argc, char** argv )
{
const char *pstrWindowsSrcTitle = "原图";
const char *pstrWindowsToolBarName = "二值图阈值";
// 从文件中加载原图
IplImage *pSrcImage = cvLoadImage("C:\\lena.jpg", CV_LOAD_IMAGE_UNCHANGED);
// 转为灰度图
g_pGrayImage = cvCreateImage(cvGetSize(pSrcImage), IPL_DEPTH_8U, 1);
cvCvtColor(pSrcImage, g_pGrayImage, CV_BGR2GRAY);
// 创建二值图
g_pBinaryImage = cvCreateImage(cvGetSize(g_pGrayImage), IPL_DEPTH_8U, 1);
// 显示原图
cvNamedWindow(pstrWindowsSrcTitle, CV_WINDOW_AUTOSIZE);
cvShowImage(pstrWindowsSrcTitle, pSrcImage);
// 创建二值图窗口
cvNamedWindow(pstrWindowsBinaryTitle, CV_WINDOW_AUTOSIZE);
// 滑动条
int nThreshold = 0;
cvCreateTrackbar(pstrWindowsToolBarName, pstrWindowsBinaryTitle, &nThreshold, 254, on_trackbar);
on_trackbar(1);
cvWaitKey(0);
cvDestroyWindow(pstrWindowsSrcTitle);
cvDestroyWindow(pstrWindowsBinaryTitle);
cvReleaseImage(&pSrcImage);
cvReleaseImage(&g_pGrayImage);
cvReleaseImage(&g_pBinaryImage);
return 0;
} 
第五个例程:轮廓检测
本篇介绍轮廓检测,轮廓检测的原理通俗的说就是掏空内部点,比如原图中有3*3的矩形点。那么就可以将中间的那一点去掉。在OpenCV中使用轮廓检测是非常方便。直接使用cvFindContours函数就能完成对图像轮廓的检测。下面就来看看这个函数的用法。
cvFindContours 函数功能:对图像进行轮廓检测,这个函数将生成一条链表以保存检测出的各个轮廓信息,并传出指向这条链表表头的指针。
函数原型:
int cvFindContours(CvArr* image, CvMemStorage* storage, CvSeq** first_contour,
int header_size=sizeof(CvContour),
int mode=CV_RETR_LIST,
int method=CV_CHAIN_APPROX_SIMPLE,
CvPoint offset=cvPoint(0,0)
);函数说明:
第一个参数表示输入图像,必须为一个8位的二值图像。
第二参数表示存储轮廓的容器。为CvMemStorage类型,定义在OpenCV的\core\types_c.h中。
第三个参数为输出参数,这个参数将指向用来存储轮廓信息的链表表头。
第四个参数表示存储轮廓链表的表头大小,当第六个参数传入CV_CHAIN_CODE时,要设置成sizeof(CvChain),其它情况统一设置成sizeof(CvContour)。
第五个参数为轮廓检测的模式,有如下取值:
CV_RETR_EXTERNAL:只检索最外面的轮廓;
CV_RETR_LIST:检索所有的轮廓,并将其保存到一条链表当中;
CV_RETR_CCOMP:检索所有的轮廓,并将他们组织为两层:顶层是各部分的外部边界,第二层是空洞的边界;
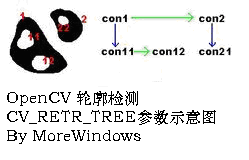
CV_RETR_TREE:检索所有的轮廓,并重构嵌套轮廓的整个层次,可以参见下图。
第六个参数用来表示轮廓边缘的近似方法的,常用值如下所示:
CV_CHAIN_CODE:以Freeman链码的方式输出轮廓,所有其他方法输出多边形(顶点的序列)。
CV_CHAIN_APPROX_SIMPLE:压缩水平的、垂直的和斜的部分,也就是,函数只保留他们的终点部分。
第七个参数表示偏移量,比如你要从图像的(100, 0)开始进行轮廓检测,那么就传入(100, 0)。
使用cvFindContours函数能检测出图像的轮廓,将轮廓绘制出来则需要另一函数——cvDrawContours来配合了。下面介绍cvDrawContours函数。
cvDrawContours 函数功能:在图像上绘制外部和内部轮廓
函数原型:
void cvDrawContours( CvArr *img,
CvSeq* contour,
CvScalar external_color,
CvScalar hole_color,
int max_level,
int thickness=1,
int line_type=8,
CvPoint offset=cvPoint(0,0));第一个参数表示输入图像,函数将在这张图像上绘制轮廓。
第二个参数表示指向轮廓链表的指针。
第三个参数和第四个参数表示颜色,绘制时会根据轮廓的层次来交替使用这二种颜色。
第五个参数表示绘制轮廓的最大层数,如果是0,只绘制contour;如果是1,追加绘制和contour同层的所有轮廓;如果是2,追加绘制比contour低一层的轮廓,以此类推;如果值是负值,则函数并不绘制contour后的轮廓,但是将画出其子轮廓,一直到abs(max_level) - 1层。
第六个参数表示轮廓线的宽度,如果为CV_FILLED则会填充轮廓内部。
第七个参数表示轮廓线的类型。
第八个参数表示偏移量,如果传入(10,20),那绘制将从图像的(10,20)处开始。
//图像的轮廓检测
#include
using namespace std;
#pragma comment(linker, "/subsystem:\"windows\" /entry:\"mainCRTStartup\"")
int main( int argc, char** argv )
{
const char *pstrWindowsSrcTitle = "原图";
const char *pstrWindowsOutLineTitle = "轮廓图";
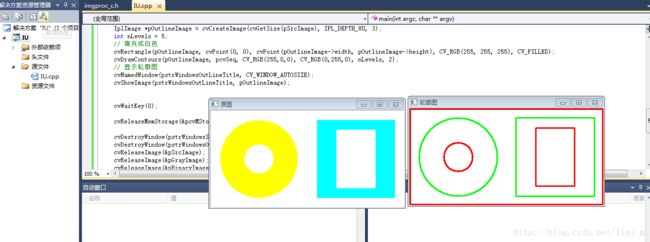
const int IMAGE_WIDTH = 400;
const int IMAGE_HEIGHT = 200;
// 创建图像
IplImage *pSrcImage = cvCreateImage(cvSize(IMAGE_WIDTH, IMAGE_HEIGHT), IPL_DEPTH_8U, 3);
// 填充成白色
cvRectangle(pSrcImage, cvPoint(0, 0), cvPoint(pSrcImage->width, pSrcImage->height), CV_RGB(255, 255, 255), CV_FILLED);
// 画圆
CvPoint ptCircleCenter = cvPoint(IMAGE_WIDTH / 4, IMAGE_HEIGHT / 2);
int nRadius = 80;
cvCircle(pSrcImage, ptCircleCenter, nRadius, CV_RGB(255, 255, 0), CV_FILLED);
ptCircleCenter = cvPoint(IMAGE_WIDTH / 4, IMAGE_HEIGHT / 2);
nRadius = 30;
cvCircle(pSrcImage, ptCircleCenter, nRadius, CV_RGB(255, 255, 255), CV_FILLED);
// 画矩形
CvPoint ptLeftTop = cvPoint(IMAGE_WIDTH / 2 + 20, 20);
CvPoint ptRightBottom = cvPoint(IMAGE_WIDTH - 20, IMAGE_HEIGHT - 20);
cvRectangle(pSrcImage, ptLeftTop, ptRightBottom, CV_RGB(0, 255, 255), CV_FILLED);
ptLeftTop = cvPoint(IMAGE_WIDTH / 2 + 60, 40);
ptRightBottom = cvPoint(IMAGE_WIDTH - 60, IMAGE_HEIGHT - 40);
cvRectangle(pSrcImage, ptLeftTop, ptRightBottom, CV_RGB(255, 255, 255), CV_FILLED);
// 显示原图
cvNamedWindow(pstrWindowsSrcTitle, CV_WINDOW_AUTOSIZE);
cvShowImage(pstrWindowsSrcTitle, pSrcImage);
// 转为灰度图
IplImage *pGrayImage = cvCreateImage(cvGetSize(pSrcImage), IPL_DEPTH_8U, 1);
cvCvtColor(pSrcImage, pGrayImage, CV_BGR2GRAY);
// 转为二值图
IplImage *pBinaryImage = cvCreateImage(cvGetSize(pGrayImage), IPL_DEPTH_8U, 1);
cvThreshold(pGrayImage, pBinaryImage, 250, 255, CV_THRESH_BINARY);
// 检索轮廓并返回检测到的轮廓的个数
CvMemStorage *pcvMStorage = cvCreateMemStorage();
CvSeq *pcvSeq = NULL;
cvFindContours(pBinaryImage, pcvMStorage, &pcvSeq, sizeof(CvContour), CV_RETR_TREE, CV_CHAIN_APPROX_SIMPLE, cvPoint(0, 0));
// 画轮廓图
IplImage *pOutlineImage = cvCreateImage(cvGetSize(pSrcImage), IPL_DEPTH_8U, 3);
int nLevels = 5;
// 填充成白色
cvRectangle(pOutlineImage, cvPoint(0, 0), cvPoint(pOutlineImage->width, pOutlineImage->height), CV_RGB(255, 255, 255), CV_FILLED);
cvDrawContours(pOutlineImage, pcvSeq, CV_RGB(255,0,0), CV_RGB(0,255,0), nLevels, 2);
// 显示轮廓图
cvNamedWindow(pstrWindowsOutLineTitle, CV_WINDOW_AUTOSIZE);
cvShowImage(pstrWindowsOutLineTitle, pOutlineImage);
cvWaitKey(0);
cvReleaseMemStorage(&pcvMStorage);
cvDestroyWindow(pstrWindowsSrcTitle);
cvDestroyWindow(pstrWindowsOutLineTitle);
cvReleaseImage(&pSrcImage);
cvReleaseImage(&pGrayImage);
cvReleaseImage(&pBinaryImage);
cvReleaseImage(&pOutlineImage);
return 0;
} 
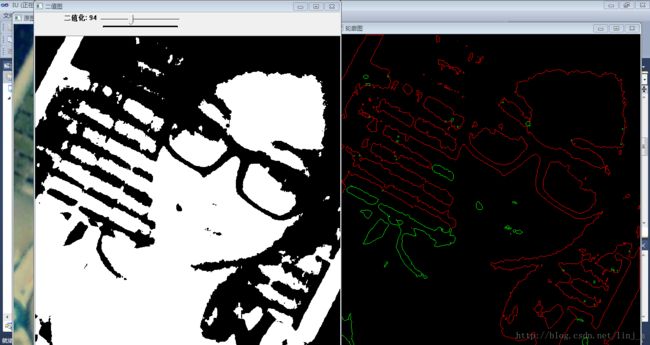
//图像的轮廓检测
#include
using namespace std;
#pragma comment(linker, "/subsystem:\"windows\" /entry:\"mainCRTStartup\"")
IplImage *g_pGrayImage = NULL;
const char *pstrWindowsBinaryTitle = "二值图";
const char *pstrWindowsOutLineTitle = "轮廓图";
CvSeq *g_pcvSeq = NULL;
void on_trackbar(int pos)
{
// 转为二值图
IplImage *pBinaryImage = cvCreateImage(cvGetSize(g_pGrayImage), IPL_DEPTH_8U, 1);
cvThreshold(g_pGrayImage, pBinaryImage, pos, 255, CV_THRESH_BINARY);
// 显示二值图
cvShowImage(pstrWindowsBinaryTitle, pBinaryImage);
CvMemStorage* cvMStorage = cvCreateMemStorage();
// 检索轮廓并返回检测到的轮廓的个数
cvFindContours(pBinaryImage,cvMStorage, &g_pcvSeq);
IplImage *pOutlineImage = cvCreateImage(cvGetSize(g_pGrayImage), IPL_DEPTH_8U, 3);
int _levels = 5;
cvZero(pOutlineImage);
cvDrawContours(pOutlineImage, g_pcvSeq, CV_RGB(255,0,0), CV_RGB(0,255,0), _levels);
cvShowImage(pstrWindowsOutLineTitle, pOutlineImage);
cvReleaseMemStorage(&cvMStorage);
cvReleaseImage(&pBinaryImage);
cvReleaseImage(&pOutlineImage);
}
int main( int argc, char** argv )
{
const char *pstrWindowsSrcTitle = "原图(http://blog.csdn.net/MoreWindows)";
const char *pstrWindowsToolBarName = "二值化";
// 从文件中加载原图
IplImage *pSrcImage = cvLoadImage("C:\\xy.jpg", CV_LOAD_IMAGE_UNCHANGED);
// 显示原图
cvNamedWindow(pstrWindowsSrcTitle, CV_WINDOW_AUTOSIZE);
cvShowImage(pstrWindowsSrcTitle, pSrcImage);
// 转为灰度图
g_pGrayImage = cvCreateImage(cvGetSize(pSrcImage), IPL_DEPTH_8U, 1);
cvCvtColor(pSrcImage, g_pGrayImage, CV_BGR2GRAY);
// 创建二值图和轮廓图窗口
cvNamedWindow(pstrWindowsBinaryTitle, CV_WINDOW_AUTOSIZE);
cvNamedWindow(pstrWindowsOutLineTitle, CV_WINDOW_AUTOSIZE);
// 滑动条
int nThreshold = 0;
cvCreateTrackbar(pstrWindowsToolBarName, pstrWindowsBinaryTitle, &nThreshold, 254, on_trackbar);
on_trackbar(1);
cvWaitKey(0);
cvDestroyWindow(pstrWindowsSrcTitle);
cvDestroyWindow(pstrWindowsBinaryTitle);
cvDestroyWindow(pstrWindowsOutLineTitle);
cvReleaseImage(&pSrcImage);
cvReleaseImage(&g_pGrayImage);
return 0;
}