莫烦Tensorflow——强化学习
强化学习(Reinforece Learning,RL)
一、什么是强化学习
强化学习是机器学习大家族中的一大类, 使用强化学习能够让机器学着如何在环境中拿到高分, 表现出优秀的成绩. 而这些成绩背后却是他所付出的辛苦劳动, 不断的试错, 不断地尝试, 累积经验, 学习经验。
其他许多机器学习算法中学习器都是学得怎样做,而RL是在尝试的过程中学习到在特定的情境下选择哪种行动可以得到最大的回报。在很多场景中,当前的行动不仅会影响当前的rewards,还会影响之后的状态和一系列的rewards。
RL最重要的3个特定在于:
(1)基本是以一种闭环的形式;
(2)不会直接指示选择哪种行动(actions);
(3)一系列的actions和奖励信号(reward signals)都会影响之后较长的时间。
RL与有监督学习、无监督学习的比较:
(1)有监督的学习是从一个已经标记的训练集中进行学习,训练集中每一个样本的特征可以视为是对该situation的描述,而其label可以视为是应该执行的正确的action,但是有监督的学习不能学习交互的情景,因为在交互的问题中获得期望行为的样例是非常不实际的,agent只能从自己的经历(experience)中进行学习,而experience中采取的行为并一定是最优的。这时利用RL就非常合适,因为RL不是利用正确的行为来指导,而是利用已有的训练信息来对行为进行评价。
(2)因为RL利用的并不是采取正确行动的experience,从这一点来看和无监督的学习确实有点像,但是还是不一样的,无监督的学习的目的可以说是从一堆未标记样本中发现隐藏的结构,而RL的目的是最大化reward signal。
(3)总的来说,RL与其他机器学习算法不同的地方在于:其中没有监督者,只有一个reward信号;反馈是延迟的,不是立即生成的;时间在RL中具有重要的意义;agent的行为会影响之后一系列的data。
RL采用的是边获得样例边学习的方式,在获得样例之后更新自己的模型,利用当前的模型来指导下一步的行动,下一步的行动获得reward之后再更新模型,不断迭代重复直到模型收敛。在这个过程中,非常重要的一点在于“在已有当前模型的情况下,如果选择下一步的行动才对完善当前的模型最有利”,这就涉及到了RL中的两个非常重要的概念:探索(exploration)和开发(exploitation),exploration是指选择之前未执行过的actions,从而探索更多的可能性;exploitation是指选择已执行过的actions,从而对已知的actions的模型进行完善。
莫烦介绍:



二、强化学习中常用的方法
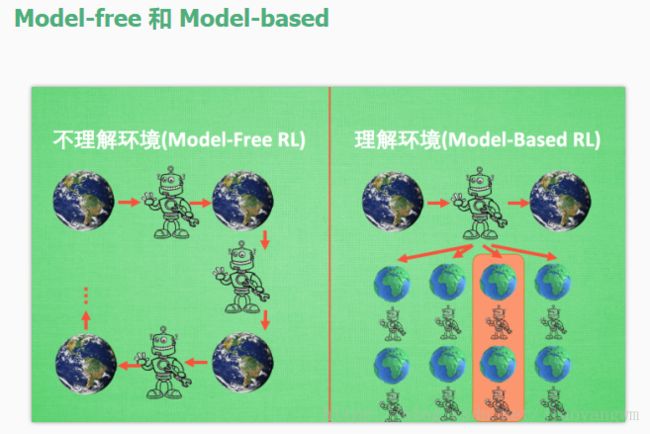
我们可以将所有强化学习的方法分为理不理解所处环境,如果我们不尝试去理解环境, 环境给了我们什么就是什么. 我们就把这种方法叫做 model-free, 这里的 model 就是用模型来表示环境, 那理解了环境也就是学会了用一个模型来代表环境, 所以这种就是 model-based 方法. 我们想象. 现在环境就是我们的世界, 我们的机器人正在这个世界里玩耍, 他不理解这个世界是怎样构成的, 也不理解世界对于他的行为会怎么样反馈. 举个例子, 他决定丢颗原子弹去真实的世界, 结果把自己给炸死了, 所有结果都是那么现实. 不过如果采取的是 model-based RL, 机器人会通过过往的经验, 先理解真实世界是怎样的, 并建立一个模型来模拟现实世界的反馈, 最后他不仅可以在现实世界中玩耍, 也能在模拟的世界中玩耍 , 这样就没必要去炸真实世界, 连自己也炸死了, 他可以像玩游戏一样炸炸游戏里的世界, 也保住了自己的小命. 那我们就来说说这两种方式的强化学习各用那些方法吧.
Model-free 的方法有很多, 像 Q learning, Sarsa, Policy Gradients 都是从环境中得到反馈然后从中学习. 而 model-based RL 只是多了一道程序, 为真实世界建模, 也可以说他们都是 model-free 的强化学习, 只是 model-based 多出了一个虚拟环境, 我们不仅可以像 model-free 那样在现实中玩耍,还能在游戏中玩耍, 而玩耍的方式也都是 model-free 中那些玩耍方式, 最终 model-based 还有一个杀手锏是 model-free 超级羡慕的. 那就是想象力.
Model-free 中, 机器人只能按部就班, 一步一步等待真实世界的反馈, 再根据反馈采取下一步行动. 而 model-based, 他能通过想象来预判断接下来将要发生的所有情况. 然后选择这些想象情况中最好的那种. 并依据这种情况来采取下一步的策略, 这也就是 围棋场上 AlphaGo 能够超越人类的原因. 接下来, 我们再来用另外一种分类方法将 强化学习分为基于概率和基于价值.
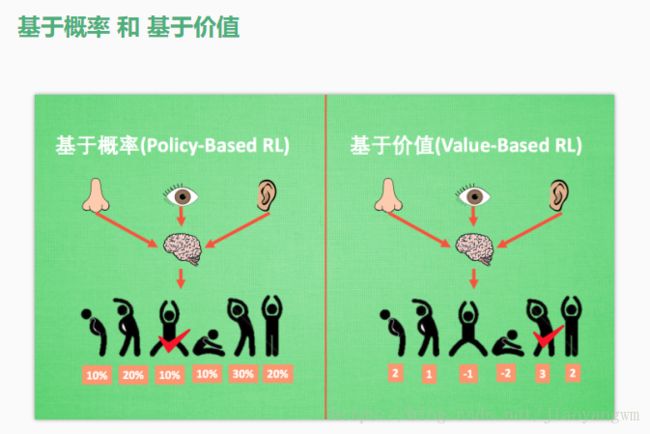
基于概率是强化学习中最直接的一种, 他能通过感官分析所处的环境, 直接输出下一步要采取的各种动作的概率, 然后根据概率采取行动, 所以每种动作都有可能被选中, 只是可能性不同. 而基于价值的方法输出则是所有动作的价值, 我们会根据最高价值来选着动作, 相比基于概率的方法, 基于价值的决策部分更为铁定, 毫不留情, 就选价值最高的, 而基于概率的, 即使某个动作的概率最高, 但是还是不一定会选到他.
我们现在说的动作都是一个一个不连续的动作, 而对于选取连续的动作, 基于价值的方法是无能为力的. 我们却能用一个概率分布在连续动作中选取特定动作, 这也是基于概率的方法的优点之一. 那么这两类使用的方法又有哪些呢?
比如在基于概率这边, 有 Policy Gradients, 在基于价值这边有 Q learning, Sarsa 等. 而且我们还能结合这两类方法的优势之处, 创造更牛逼的一种方法, 叫做 Actor-Critic, actor 会基于概率做出动作, 而 critic 会对做出的动作给出动作的价值, 这样就在原有的 policy gradients 上加速了学习过程.

强化学习还能用另外一种方式分类, 回合更新和单步更新, 想象强化学习就是在玩游戏, 游戏回合有开始和结束. 回合更新指的是游戏开始后, 我们要等待游戏结束, 然后再总结这一回合中的所有转折点, 再更新我们的行为准则. 而单步更新则是在游戏进行中每一步都在更新, 不用等待游戏的结束, 这样我们就能边玩边学习了.
再来说说方法, Monte-carlo learning 和基础版的 policy gradients 等 都是回合更新制, Qlearning, Sarsa, 升级版的 policy gradients 等都是单步更新制. 因为单步更新更有效率, 所以现在大多方法都是基于单步更新. 比如有的强化学习问题并不属于回合问题.
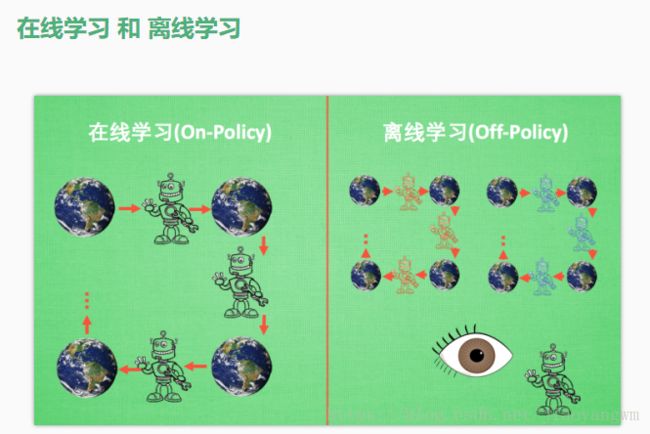
这个视频的最后一种分类方式是 在线学习和离线学习, 所谓在线学习, 就是指我必须本人在场, 并且一定是本人边玩边学习, 而离线学习是你可以选择自己玩, 也可以选择看着别人玩, 通过看别人玩来学习别人的行为准则, 离线学习 同样是从过往的经验中学习, 但是这些过往的经历没必要是自己的经历, 任何人的经历都能被学习. 或者我也不必要边玩边学习, 我可以白天先存储下来玩耍时的记忆, 然后晚上通过离线学习来学习白天的记忆.那么每种学习的方法又有哪些呢?
最典型的在线学习就是 Sarsa 了, 还有一种优化 Sarsa 的算法, 叫做 Sarsa lambda, 最典型的离线学习就是 Q learning, 后来人也根据离线学习的属性, 开发了更强大的算法, 比如让计算机学会玩电动的 Deep-Q-Network.
三、Q-Learning
Q-learning 是一种记录行为值 (Q value) 的方法, 每种在一定状态的行为都会有一个值 Q(s, a), 就是说 行为 a 在 s 状态的值是 Q(s, a). s 在上面的探索者游戏中, 就是 o 所在的地点了. 而每一个地点探索者都能做出两个行为 left/right, 这就是探索者的所有可行的 a 啦.
如果在某个地点 s1, 探索者计算了他能有的两个行为, a1/a2=left/right, 计算结果是 Q(s1, a1) > Q(s1, a2), 那么探索者就会选择 left 这个行为. 这就是 Q learning 的行为选择简单规则.
Q 表:
对于 tabular Q learning, 我们必须将所有的 Q values (行为值) 放在 q_table 中, 更新 q_table 也是在更新他的行为准则. q_table 的 index 是所有对应的 state (探索者位置), columns 是对应的 action (探索者行为).

Q-Learning的Q(s1)是关于之后的所有奖励都有关的,但是离目前状态越远的奖励衰减的越严重,也就是离得越远,看的越不清楚,越无法判断奖励值。