详解GAN代码之简单搭建并详细解析CycleGAN
训练数据集1:斑马与马
下载链接:https://pan.baidu.com/s/1Zf6hvoDMsMi51WIPEOoqzg 密码:gua5
训练数据集2:橘子与苹果
下载链接:https://pan.baidu.com/s/1R0s2eaBxMCozbCCs7_1Juw 密码:z9y1
训练数据集3:填充轮廓->建筑照片
下载链接:https://pan.baidu.com/s/1xUg8AC7NEXyKebSUNtRvdg 密码:2kw1
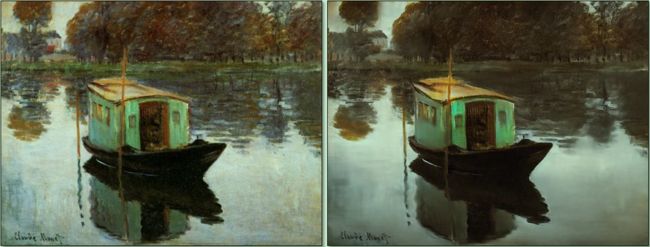
在笔者看来,CycleGAN是2017年度最有趣的深度学习成果之一,因为实现了两个域的图像的互相转换(风格迁移),比如下面两个论文中所举的例子(截图来自论文):
(1) 将一副印象派画家莫奈的画作转化为相片(同时可将相片转化成印象派画作)
(2) 将拍摄的冬日景象转化成夏日景象(同时可将夏日景象转化成冬日景象)

在本篇博文中,笔者就教大家使用简单的代码搭建CycleGAN,亲自动手实践两个域的图片的相互转换。
在开始搭建CycleGAN与代码解析之前,笔者想说的是:要亲自搭建CycleGAN框架,还需各位读者朋友明白CycleGAN的原理。鉴于CycleGAN的原理网上已经有很多资料进行解析,笔者在下面提供一些笔者认为比较好的途径:
(1) 直接进行论文阅读:https://arxiv.org/abs/1703.10593
(2) 推荐看这篇之乎专栏解析的CycleGAN:可能是近期最好玩的深度学习模型:CycleGAN的原理与实验详解,里面不仅介绍了CycleGAN的原理,还介绍了其他应用,比如如何把女人变成男人,男人变成女人,猫狗之间的互相转换,如何去除图片中的马赛克(额,车速较快请握紧扶手。)
(3) 笔者也在本篇博客中简单介绍一下CycleGAN的原理(截图来自论文):
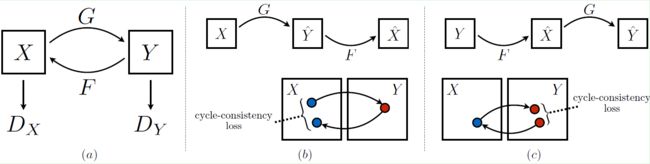
CycleGAN是一个环形的结构,主要由两个生成器及两个判别器组成,如上图所示。X表示X域的图像,Y表示Y域的图像。X域的图像通过生成器G生成Y域的图像,再通过生成器F重构回X域输入的原图像;Y域的图像通过生成器F生成X域图像,再通过生成器G重构回Y域输入的原图像。判别器Dx和Dy起到判别作用,确保图像的风格迁移。
CycleGAN的训练的损失函数如下所示(截图来自论文):

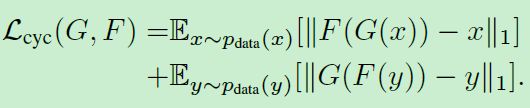
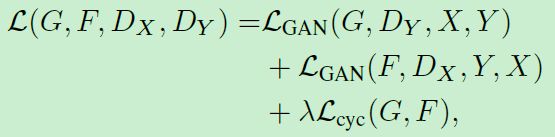
可以看到,CycleGAN的loss函数分成两大部分,一共四块。其中两块GAN loss,两块L1 loss。整个CycleGAN框架采用end-to-end方式训练。

总而言之,CycleGAN想要达到的目的是,完成两个域之间的风格转换,在风格转换的同时,又要确保图中物体的几何形状和空间关系不发生变化。
下面,笔者就放出搭建CycleGAN的源码,首先列举一下笔者主要使用的工具和库:
(1) Python 3.5.2
(2) numpy
(3) Tensorflow 1.2
(4) argparse 用来解析命令行参数
(5) random 用来打乱输入顺序
(6) os 用来读取图片路径和文件名
(7) glob 用来读取图片路径和文件名
(8) cv2 用来读取图片
笔者搭建的CycleGAN代码分成5大部分,分别是:
(1) train.py 训练的主控程序
(2) train_image_reader.py 训练数据读取接口
(3) net.py 定义网络结构
(4) evaluate.py 测试的主控程序
(5) test_image_reader.py 训练数据读取接口
其中,训练时使用到的文件是(1),(2),(3)项,测试时使用到的文件时(3),(4),(5)。
下面,笔者放出代码与注释:
首先是train.py文件的代码:
from __future__ import print_function
import argparse
from datetime import datetime
from random import shuffle
import random
import os
import sys
import time
import math
import tensorflow as tf
import numpy as np
import glob
import cv2
from train_image_reader import *
from net import *
parser = argparse.ArgumentParser(description='')
parser.add_argument("--snapshot_dir", default='./snapshots', help="path of snapshots") #保存模型的路径
parser.add_argument("--out_dir", default='./train_out', help="path of train outputs") #训练时保存可视化输出的路径
parser.add_argument("--image_size", type=int, default=256, help="load image size") #网络输入的尺度
parser.add_argument("--random_seed", type=int, default=1234, help="random seed") #随机数种子
parser.add_argument('--base_lr', type=float, default=0.0002, help='initial learning rate for adam') #基础学习率
parser.add_argument('--epoch', dest='epoch', type=int, default=200, help='# of epoch') #训练的epoch数量
parser.add_argument('--epoch_step', dest='epoch_step', type=int, default=100, help='# of epoch to decay lr') #训练中保持学习率不变的epoch数量
parser.add_argument("--lamda", type=float, default=10.0, help="L1 lamda") #训练中L1_Loss前的乘数
parser.add_argument('--beta1', dest='beta1', type=float, default=0.5, help='momentum term of adam') #adam优化器的beta1参数
parser.add_argument("--summary_pred_every", type=int, default=200, help="times to summary.") #训练中每过多少step保存训练日志(记录一下loss值)
parser.add_argument("--write_pred_every", type=int, default=100, help="times to write.") #训练中每过多少step保存可视化结果
parser.add_argument("--save_pred_every", type=int, default=10000, help="times to save.") #训练中每过多少step保存模型(可训练参数)
parser.add_argument("--x_train_data_path", default='./dataset/horse2zebra/trainA/', help="path of x training datas.") #x域的训练图片路径
parser.add_argument("--y_train_data_path", default='./dataset/horse2zebra/trainB/', help="path of y training datas.") #y域的训练图片路径
args = parser.parse_args()
def save(saver, sess, logdir, step): #保存模型的save函数
model_name = 'model' #保存的模型名前缀
checkpoint_path = os.path.join(logdir, model_name) #模型的保存路径与名称
if not os.path.exists(logdir): #如果路径不存在即创建
os.makedirs(logdir)
saver.save(sess, checkpoint_path, global_step=step) #保存模型
print('The checkpoint has been created.')
def cv_inv_proc(img): #cv_inv_proc函数将读取图片时归一化的图片还原成原图
img_rgb = (img + 1.) * 127.5
return img_rgb.astype(np.float32) #返回bgr格式的图像,方便cv2写图像
def get_write_picture(x_image, y_image, fake_y, fake_x_, fake_x, fake_y_): #get_write_picture函数得到训练过程中的可视化结果
x_image = cv_inv_proc(x_image) #还原x域的图像
y_image = cv_inv_proc(y_image) #还原y域的图像
fake_y = cv_inv_proc(fake_y[0]) #还原生成的y域的图像
fake_x_ = cv_inv_proc(fake_x_[0]) #还原重建的x域的图像
fake_x = cv_inv_proc(fake_x[0]) #还原生成的x域的图像
fake_y_ = cv_inv_proc(fake_y_[0]) #还原重建的y域的图像
row1 = np.concatenate((x_image, fake_y, fake_x_), axis=1) #得到训练中可视化结果的第一行
row2 = np.concatenate((y_image, fake_x, fake_y_), axis=1) #得到训练中可视化结果的第二行
output = np.concatenate((row1, row2), axis=0) #得到训练中可视化结果
return output
def make_train_data_list(x_data_path, y_data_path): #make_train_data_list函数得到训练中的x域和y域的图像路径名称列表
x_input_images_raw = glob.glob(os.path.join(x_data_path, "*")) #读取全部的x域图像路径名称列表
y_input_images_raw = glob.glob(os.path.join(y_data_path, "*")) #读取全部的y域图像路径名称列表
x_input_images, y_input_images = add_train_list(x_input_images_raw, y_input_images_raw) #将x域图像数量与y域图像数量对齐
return x_input_images, y_input_images
def add_train_list(x_input_images_raw, y_input_images_raw): #add_train_list函数将x域和y域的图像数量变成一致
if len(x_input_images_raw) == len(y_input_images_raw): #如果x域和y域图像数量本来就一致,直接返回
return shuffle(x_input_images_raw), shuffle(y_input_images_raw)
elif len(x_input_images_raw) > len(y_input_images_raw): #如果x域的训练图像数量大于y域的训练图像数量,则随机选择y域的图像补充y域
mul_num = int(len(x_input_images_raw)/len(y_input_images_raw)) #计算两域图像数量相差的倍数
y_append_num = len(x_input_images_raw) - len(y_input_images_raw)*mul_num #计算需要随机出的y域图像数量
append_list = [random.randint(0,len(y_input_images_raw)-1) for i in range(y_append_num)] #得到需要补充的y域图像下标
y_append_images = [] #初始化需要被补充的y域图像路径名称列表
for a in append_list:
y_append_images.append(y_input_images_raw[a])
y_input_images = y_input_images_raw * mul_num + y_append_images #得到数量与x域一致的y域图像
shuffle(x_input_images_raw) #随机打乱x域图像顺序
shuffle(y_input_images) #随机打乱y域图像顺序
return x_input_images_raw, y_input_images #返回数量一致的x域和y域图像路径名称列表
else: #与elif中的逻辑一致,只是x与y互换,不再赘述
mul_num = int(len(y_input_images_raw)/len(x_input_images_raw))
x_append_num = len(y_input_images_raw) - len(x_input_images_raw)*mul_num
append_list = [random.randint(0,len(x_input_images_raw)-1) for i in range(x_append_num)]
x_append_images = []
for a in append_list:
x_append_images.append(x_input_images_raw[a])
x_input_images = x_input_images_raw * mul_num + x_append_images
shuffle(y_input_images_raw)
shuffle(x_input_images)
return x_input_images, y_input_images_raw
def l1_loss(src, dst): #定义l1_loss
return tf.reduce_mean(tf.abs(src - dst))
def gan_loss(src, dst): #定义gan_loss,在这里用了二范数
return tf.reduce_mean((src-dst)**2)
def main():
if not os.path.exists(args.snapshot_dir): #如果保存模型参数的文件夹不存在则创建
os.makedirs(args.snapshot_dir)
if not os.path.exists(args.out_dir): #如果保存训练中可视化输出的文件夹不存在则创建
os.makedirs(args.out_dir)
x_datalists, y_datalists = make_train_data_list(args.x_train_data_path, args.y_train_data_path) #得到数量相同的x域和y域图像路径名称列表
tf.set_random_seed(args.random_seed) #初始一下随机数
x_img = tf.placeholder(tf.float32,shape=[1, args.image_size, args.image_size,3],name='x_img') #输入的x域图像
y_img = tf.placeholder(tf.float32,shape=[1, args.image_size, args.image_size,3],name='y_img') #输入的y域图像
fake_y = generator(image=x_img, reuse=False, name='generator_x2y') #生成的y域图像
fake_x_ = generator(image=fake_y, reuse=False, name='generator_y2x') #重建的x域图像
fake_x = generator(image=y_img, reuse=True, name='generator_y2x') #生成的x域图像
fake_y_ = generator(image=fake_x, reuse=True, name='generator_x2y') #重建的y域图像
dy_fake = discriminator(image=fake_y, reuse=False, name='discriminator_y') #判别器返回的对生成的y域图像的判别结果
dx_fake = discriminator(image=fake_x, reuse=False, name='discriminator_x') #判别器返回的对生成的x域图像的判别结果
dy_real = discriminator(image=y_img, reuse=True, name='discriminator_y') #判别器返回的对真实的y域图像的判别结果
dx_real = discriminator(image=x_img, reuse=True, name='discriminator_x') #判别器返回的对真实的x域图像的判别结果
gen_loss = gan_loss(dy_fake, tf.ones_like(dy_fake)) + gan_loss(dx_fake, tf.ones_like(dx_fake)) + args.lamda*l1_loss(x_img, fake_x_) + args.lamda*l1_loss(y_img, fake_y_) #计算生成器的loss
dy_loss_real = gan_loss(dy_real, tf.ones_like(dy_real)) #计算判别器判别的真实的y域图像的loss
dy_loss_fake = gan_loss(dy_fake, tf.zeros_like(dy_fake)) #计算判别器判别的生成的y域图像的loss
dy_loss = (dy_loss_real + dy_loss_fake) / 2 #计算判别器判别的y域图像的loss
dx_loss_real = gan_loss(dx_real, tf.ones_like(dx_real)) #计算判别器判别的真实的x域图像的loss
dx_loss_fake = gan_loss(dx_fake, tf.zeros_like(dx_fake)) #计算判别器判别的生成的x域图像的loss
dx_loss = (dx_loss_real + dx_loss_fake) / 2 #计算判别器判别的x域图像的loss
dis_loss = dy_loss + dx_loss #计算判别器的loss
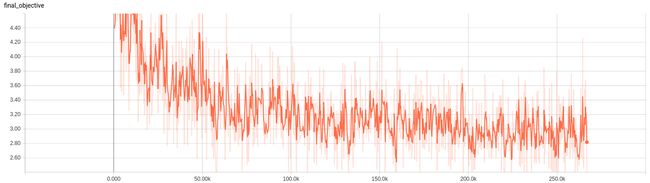
gen_loss_sum = tf.summary.scalar("final_objective", gen_loss) #记录生成器loss的日志
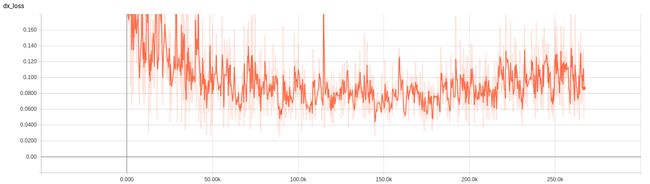
dx_loss_sum = tf.summary.scalar("dx_loss", dx_loss) #记录判别器判别的x域图像的loss的日志
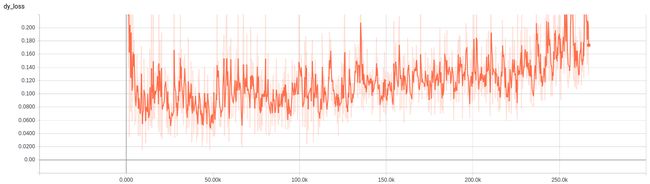
dy_loss_sum = tf.summary.scalar("dy_loss", dy_loss) #记录判别器判别的y域图像的loss的日志
dis_loss_sum = tf.summary.scalar("dis_loss", dis_loss) #记录判别器的loss的日志
discriminator_sum = tf.summary.merge([dx_loss_sum, dy_loss_sum, dis_loss_sum])
summary_writer = tf.summary.FileWriter(args.snapshot_dir, graph=tf.get_default_graph()) #日志记录器
g_vars = [v for v in tf.trainable_variables() if 'generator' in v.name] #所有生成器的可训练参数
d_vars = [v for v in tf.trainable_variables() if 'discriminator' in v.name] #所有判别器的可训练参数
lr = tf.placeholder(tf.float32, None, name='learning_rate') #训练中的学习率
d_optim = tf.train.AdamOptimizer(lr, beta1=args.beta1) #判别器训练器
g_optim = tf.train.AdamOptimizer(lr, beta1=args.beta1) #生成器训练器
d_grads_and_vars = d_optim.compute_gradients(dis_loss, var_list=d_vars) #计算判别器参数梯度
d_train = d_optim.apply_gradients(d_grads_and_vars) #更新判别器参数
g_grads_and_vars = g_optim.compute_gradients(gen_loss, var_list=g_vars) #计算生成器参数梯度
g_train = g_optim.apply_gradients(g_grads_and_vars) #更新生成器参数
train_op = tf.group(d_train, g_train) #train_op表示了参数更新操作
config = tf.ConfigProto()
config.gpu_options.allow_growth = True #设定显存不超量使用
sess = tf.Session(config=config) #新建会话层
init = tf.global_variables_initializer() #参数初始化器
sess.run(init) #初始化所有可训练参数
saver = tf.train.Saver(var_list=tf.global_variables(), max_to_keep=50) #模型保存器
counter = 0 #counter记录训练步数
for epoch in range(args.epoch): #训练epoch数
shuffle(x_datalists) #每训练一个epoch,就打乱一下x域图像顺序
shuffle(y_datalists) #每训练一个epoch,就打乱一下y域图像顺序
lrate = args.base_lr if epoch < args.epoch_step else args.base_lr*(args.epoch-epoch)/(args.epoch-args.epoch_step) #得到该训练epoch的学习率
for step in range(len(x_datalists)): #每个训练epoch中的训练step数
counter += 1
x_image_resize, y_image_resize = TrainImageReader(x_datalists, y_datalists, step, args.image_size) #读取x域图像和y域图像
batch_x_image = np.expand_dims(np.array(x_image_resize).astype(np.float32), axis = 0) #填充维度
batch_y_image = np.expand_dims(np.array(y_image_resize).astype(np.float32), axis = 0) #填充维度
feed_dict = { lr : lrate, x_img : batch_x_image, y_img : batch_y_image} #得到feed_dict
gen_loss_value, dis_loss_value, _ = sess.run([gen_loss, dis_loss, train_op], feed_dict=feed_dict) #得到每个step中的生成器和判别器loss
if counter % args.save_pred_every == 0: #每过save_pred_every次保存模型
save(saver, sess, args.snapshot_dir, counter)
if counter % args.summary_pred_every == 0: #每过summary_pred_every次保存训练日志
gen_loss_sum_value, discriminator_sum_value = sess.run([gen_loss_sum, discriminator_sum], feed_dict=feed_dict)
summary_writer.add_summary(gen_loss_sum_value, counter)
summary_writer.add_summary(discriminator_sum_value, counter)
if counter % args.write_pred_every == 0: #每过write_pred_every次写一下训练的可视化结果
fake_y_value, fake_x__value, fake_x_value, fake_y__value = sess.run([fake_y, fake_x_, fake_x, fake_y_], feed_dict=feed_dict) #run出网络输出
write_image = get_write_picture(x_image_resize, y_image_resize, fake_y_value, fake_x__value, fake_x_value, fake_y__value) #得到训练的可视化结果
write_image_name = args.out_dir + "/out"+ str(counter) + ".png" #待保存的训练可视化结果路径与名称
cv2.imwrite(write_image_name, write_image) #保存训练的可视化结果
print('epoch {:d} step {:d} \t gen_loss = {:.3f}, dis_loss = {:.3f}'.format(epoch, step, gen_loss_value, dis_loss_value))
if __name__ == '__main__':
main()
然后是train_image_reader.py文件:
import os
import numpy as np
import tensorflow as tf
import cv2
def TrainImageReader(x_file_list, y_file_list, step, size): #训练数据读取接口
file_length = len(x_file_list) #获取图片列表总长度
line_idx = step % file_length #获取一张待读取图片的下标
x_line_content = x_file_list[line_idx] #获取一张x域图片路径与名称
y_line_content = y_file_list[line_idx] #获取一张y域图片路径与名称
x_image = cv2.imread(x_line_content,1) #读取一张x域的图片
y_image = cv2.imread(y_line_content,1) #读取一张y域的图片
x_image_resize_t = cv2.resize(x_image, (size, size)) #改变读取的x域图片的大小
x_image_resize = x_image_resize_t/127.5-1. #归一化x域的图片
y_image_resize_t = cv2.resize(y_image, (size, size)) #改变读取的y域图片的大小
y_image_resize = y_image_resize_t/127.5-1. #归一化y域的图片
return x_image_resize, y_image_resize #返回读取并处理的一张x域图片和y域图片
接着是net.py文件:
import numpy as np
import tensorflow as tf
import math
#构造可训练参数
def make_var(name, shape, trainable = True):
return tf.get_variable(name, shape, trainable = trainable)
#定义卷积层
def conv2d(input_, output_dim, kernel_size, stride, padding = "SAME", name = "conv2d", biased = False):
input_dim = input_.get_shape()[-1]
with tf.variable_scope(name):
kernel = make_var(name = 'weights', shape=[kernel_size, kernel_size, input_dim, output_dim])
output = tf.nn.conv2d(input_, kernel, [1, stride, stride, 1], padding = padding)
if biased:
biases = make_var(name = 'biases', shape = [output_dim])
output = tf.nn.bias_add(output, biases)
return output
#定义空洞卷积层
def atrous_conv2d(input_, output_dim, kernel_size, dilation, padding = "SAME", name = "atrous_conv2d", biased = False):
input_dim = input_.get_shape()[-1]
with tf.variable_scope(name):
kernel = make_var(name = 'weights', shape = [kernel_size, kernel_size, input_dim, output_dim])
output = tf.nn.atrous_conv2d(input_, kernel, dilation, padding = padding)
if biased:
biases = make_var(name = 'biases', shape = [output_dim])
output = tf.nn.bias_add(output, biases)
return output
#定义反卷积层
def deconv2d(input_, output_dim, kernel_size, stride, padding = "SAME", name = "deconv2d"):
input_dim = input_.get_shape()[-1]
input_height = int(input_.get_shape()[1])
input_width = int(input_.get_shape()[2])
with tf.variable_scope(name):
kernel = make_var(name = 'weights', shape = [kernel_size, kernel_size, output_dim, input_dim])
output = tf.nn.conv2d_transpose(input_, kernel, [1, input_height * 2, input_width * 2, output_dim], [1, 2, 2, 1], padding = "SAME")
return output
#定义batchnorm(批次归一化)层
def batch_norm(input_, name="batch_norm"):
with tf.variable_scope(name):
input_dim = input_.get_shape()[-1]
scale = tf.get_variable("scale", [input_dim], initializer=tf.random_normal_initializer(1.0, 0.02, dtype=tf.float32))
offset = tf.get_variable("offset", [input_dim], initializer=tf.constant_initializer(0.0))
mean, variance = tf.nn.moments(input_, axes=[1,2], keep_dims=True)
epsilon = 1e-5
inv = tf.rsqrt(variance + epsilon)
normalized = (input_-mean)*inv
output = scale*normalized + offset
return output
#定义最大池化层
def max_pooling(input_, kernel_size, stride, name, padding = "SAME"):
return tf.nn.max_pool(input_, ksize=[1, kernel_size, kernel_size, 1], strides=[1, stride, stride, 1], padding=padding, name=name)
#定义平均池化层
def avg_pooling(input_, kernel_size, stride, name, padding = "SAME"):
return tf.nn.avg_pool(input_, ksize=[1, kernel_size, kernel_size, 1], strides=[1, stride, stride, 1], padding=padding, name=name)
#定义lrelu激活层
def lrelu(x, leak=0.2, name = "lrelu"):
return tf.maximum(x, leak*x)
#定义relu激活层
def relu(input_, name = "relu"):
return tf.nn.relu(input_, name = name)
#定义残差块
def residule_block_33(input_, output_dim, kernel_size = 3, stride = 1, dilation = 2, atrous = False, name = "res"):
if atrous:
conv2dc0 = atrous_conv2d(input_ = input_, output_dim = output_dim, kernel_size = kernel_size, dilation = dilation, name = (name + '_c0'))
conv2dc0_norm = batch_norm(input_ = conv2dc0, name = (name + '_bn0'))
conv2dc0_relu = relu(input_ = conv2dc0_norm)
conv2dc1 = atrous_conv2d(input_ = conv2dc0_relu, output_dim = output_dim, kernel_size = kernel_size, dilation = dilation, name = (name + '_c1'))
conv2dc1_norm = batch_norm(input_ = conv2dc1, name = (name + '_bn1'))
else:
conv2dc0 = conv2d(input_ = input_, output_dim = output_dim, kernel_size = kernel_size, stride = stride, name = (name + '_c0'))
conv2dc0_norm = batch_norm(input_ = conv2dc0, name = (name + '_bn0'))
conv2dc0_relu = relu(input_ = conv2dc0_norm)
conv2dc1 = conv2d(input_ = conv2dc0_relu, output_dim = output_dim, kernel_size = kernel_size, stride = stride, name = (name + '_c1'))
conv2dc1_norm = batch_norm(input_ = conv2dc1, name = (name + '_bn1'))
add_raw = input_ + conv2dc1_norm
output = relu(input_ = add_raw)
return output
#定义生成器
def generator(image, gf_dim=64, reuse=False, name="generator"):
#生成器输入尺度: 1*256*256*3
input_dim = image.get_shape()[-1]
with tf.variable_scope(name):
if reuse:
tf.get_variable_scope().reuse_variables()
else:
assert tf.get_variable_scope().reuse is False
#第1个卷积模块,输出尺度: 1*256*256*64
c0 = relu(batch_norm(conv2d(input_ = image, output_dim = gf_dim, kernel_size = 7, stride = 1, name = 'g_e0_c'), name = 'g_e0_bn'))
#第2个卷积模块,输出尺度: 1*128*128*128
c1 = relu(batch_norm(conv2d(input_ = c0, output_dim = gf_dim * 2, kernel_size = 3, stride = 2, name = 'g_e1_c'), name = 'g_e1_bn'))
#第3个卷积模块,输出尺度: 1*64*64*256
c2 = relu(batch_norm(conv2d(input_ = c1, output_dim = gf_dim * 4, kernel_size = 3, stride = 2, name = 'g_e2_c'), name = 'g_e2_bn'))
#9个残差块:
r1 = residule_block_33(input_ = c2, output_dim = gf_dim*4, atrous = False, name='g_r1')
r2 = residule_block_33(input_ = r1, output_dim = gf_dim*4, atrous = False, name='g_r2')
r3 = residule_block_33(input_ = r2, output_dim = gf_dim*4, atrous = False, name='g_r3')
r4 = residule_block_33(input_ = r3, output_dim = gf_dim*4, atrous = False, name='g_r4')
r5 = residule_block_33(input_ = r4, output_dim = gf_dim*4, atrous = False, name='g_r5')
r6 = residule_block_33(input_ = r5, output_dim = gf_dim*4, atrous = False, name='g_r6')
r7 = residule_block_33(input_ = r6, output_dim = gf_dim*4, atrous = False, name='g_r7')
r8 = residule_block_33(input_ = r7, output_dim = gf_dim*4, atrous = False, name='g_r8')
r9 = residule_block_33(input_ = r8, output_dim = gf_dim*4, atrous = False, name='g_r9')
#第9个残差块的输出尺度: 1*64*64*256
#第1个反卷积模块,输出尺度: 1*128*128*128
d1 = relu(batch_norm(deconv2d(input_ = r9, output_dim = gf_dim * 2, kernel_size = 3, stride = 2, name = 'g_d1_dc'),name = 'g_d1_bn'))
#第2个反卷积模块,输出尺度: 1*256*256*64
d2 = relu(batch_norm(deconv2d(input_ = d1, output_dim = gf_dim, kernel_size = 3, stride = 2, name = 'g_d2_dc'),name = 'g_d2_bn'))
#最后一个卷积模块,输出尺度: 1*256*256*3
d3 = conv2d(input_=d2, output_dim = input_dim, kernel_size = 7, stride = 1, name = 'g_d3_c')
#经过tanh函数激活得到生成的输出
output = tf.nn.tanh(d3)
return output
#定义判别器
def discriminator(image, df_dim=64, reuse=False, name="discriminator"):
with tf.variable_scope(name):
if reuse:
tf.get_variable_scope().reuse_variables()
else:
assert tf.get_variable_scope().reuse is False
#第1个卷积模块,输出尺度: 1*128*128*64
h0 = lrelu(conv2d(input_ = image, output_dim = df_dim, kernel_size = 4, stride = 2, name='d_h0_conv'))
#第2个卷积模块,输出尺度: 1*64*64*128
h1 = lrelu(batch_norm(conv2d(input_ = h0, output_dim = df_dim*2, kernel_size = 4, stride = 2, name='d_h1_conv'), 'd_bn1'))
#第3个卷积模块,输出尺度: 1*32*32*256
h2 = lrelu(batch_norm(conv2d(input_ = h1, output_dim = df_dim*4, kernel_size = 4, stride = 2, name='d_h2_conv'), 'd_bn2'))
#第4个卷积模块,输出尺度: 1*32*32*512
h3 = lrelu(batch_norm(conv2d(input_ = h2, output_dim = df_dim*8, kernel_size = 4, stride = 1, name='d_h3_conv'), 'd_bn3'))
#最后一个卷积模块,输出尺度: 1*32*32*1
output = conv2d(input_ = h3, output_dim = 1, kernel_size = 4, stride = 1, name='d_h4_conv')
return output上面的三个文件就是训练时所需的全部代码,如果要启动训练,只需改动两个参数即可,即train.py中参数中的最后两个(即x_train_data_path和Y_train_data_path,指X域和Y域的训练输入图像路径)。
下面是evaluate.py文件:
from __future__ import print_function
import argparse
from datetime import datetime
from random import shuffle
import os
import sys
import time
import math
import tensorflow as tf
import numpy as np
import glob
import cv2
from test_image_reader import *
from net import *
parser = argparse.ArgumentParser(description='')
parser.add_argument("--x_test_data_path", default='./dataset/horse2zebra/testA/', help="path of x test datas.") #x域的测试图片路径
parser.add_argument("--y_test_data_path", default='./dataset/horse2zebra/testB/', help="path of y test datas.") #y域的测试图片路径
parser.add_argument("--image_size", type=int, default=256, help="load image size") #网络输入的尺度
parser.add_argument("--snapshots", default='./snapshots/',help="Path of Snapshots") #读取训练好的模型参数的路径
parser.add_argument("--out_dir_x", default='./test_output_x/',help="Output Folder") #保存x域的输入图片与生成的y域图片的路径
parser.add_argument("--out_dir_y", default='./test_output_y/',help="Output Folder") #保存y域的输入图片与生成的x域图片的路径
args = parser.parse_args()
def make_test_data_list(x_data_path, y_data_path): #make_test_data_list函数得到测试中的x域和y域的图像路径名称列表
x_input_images = glob.glob(os.path.join(x_data_path, "*")) #读取全部的x域图像路径名称列表
y_input_images = glob.glob(os.path.join(y_data_path, "*")) #读取全部的y域图像路径名称列表
return x_input_images, y_input_images
def cv_inv_proc(img): #cv_inv_proc函数将读取图片时归一化的图片还原成原图
img_rgb = (img + 1.) * 127.5
return img_rgb.astype(np.float32) #bgr
def get_write_picture(x_image, y_image, fake_y, fake_x): #get_write_picture函数得到网络测试结果
x_image = cv_inv_proc(x_image) #还原x域的图像
y_image = cv_inv_proc(y_image) #还原y域的图像
fake_y = cv_inv_proc(fake_y[0]) #还原生成的y域的图像
fake_x = cv_inv_proc(fake_x[0]) #还原生成的x域的图像
x_output = np.concatenate((x_image, fake_y), axis=1) #得到x域的输入图像以及对应的生成的y域图像
y_output = np.concatenate((y_image, fake_x), axis=1) #得到y域的输入图像以及对应的生成的x域图像
return x_output, y_output
def main():
if not os.path.exists(args.out_dir_x): #如果保存x域测试结果的文件夹不存在则创建
os.makedirs(args.out_dir_x)
if not os.path.exists(args.out_dir_y): #如果保存y域测试结果的文件夹不存在则创建
os.makedirs(args.out_dir_y)
x_datalists, y_datalists = make_test_data_list(args.x_test_data_path, args.y_test_data_path) #得到待测试的x域和y域图像路径名称列表
test_x_image = tf.placeholder(tf.float32,shape=[1, 256, 256, 3], name = 'test_x_image') #输入的x域图像
test_y_image = tf.placeholder(tf.float32,shape=[1, 256, 256, 3], name = 'test_y_image') #输入的y域图像
fake_y = generator(image=test_x_image, reuse=False, name='generator_x2y') #得到生成的y域图像
fake_x = generator(image=test_y_image, reuse=False, name='generator_y2x') #得到生成的x域图像
restore_var = [v for v in tf.global_variables() if 'generator' in v.name] #需要载入的已训练的模型参数
config = tf.ConfigProto()
config.gpu_options.allow_growth = True #设定显存不超量使用
sess = tf.Session(config=config) #建立会话层
saver = tf.train.Saver(var_list=restore_var,max_to_keep=1) #导入模型参数时使用
checkpoint = tf.train.latest_checkpoint(args.snapshots) #读取模型参数
saver.restore(sess, checkpoint) #导入模型参数
total_step = len(x_datalists) if len(x_datalists) > len(y_datalists) else len(y_datalists) #测试的总步数
for step in range(total_step):
test_ximage_name, test_ximage = TestImageReader(x_datalists, step, args.image_size) #得到x域的输入及名称
test_yimage_name, test_yimage = TestImageReader(y_datalists, step, args.image_size) #得到y域的输入及名称
batch_x_image = np.expand_dims(np.array(test_ximage).astype(np.float32), axis = 0) #填充维度
batch_y_image = np.expand_dims(np.array(test_yimage).astype(np.float32), axis = 0) #填充维度
feed_dict = { test_x_image : batch_x_image, test_y_image : batch_y_image} #建立feed_dict
fake_y_value, fake_x_value = sess.run([fake_y, fake_x], feed_dict=feed_dict) #得到生成的y域图像与x域图像
x_write_image, y_write_image = get_write_picture(test_ximage, test_yimage, fake_y_value, fake_x_value) #得到最终的图片结果
x_write_image_name = args.out_dir_x + "/"+ test_ximage_name + ".png" #待保存的x域图像与其对应的y域生成结果名字
y_write_image_name = args.out_dir_y + "/"+ test_yimage_name + ".png" #待保存的y域图像与其对应的x域生成结果名字
cv2.imwrite(x_write_image_name, x_write_image) #保存图像
cv2.imwrite(y_write_image_name, y_write_image) #保存图像
print('step {:d}'.format(step))
if __name__ == '__main__':
main()最后是test_image_reader.py文件的代码:
import os
import numpy as np
import tensorflow as tf
import cv2
def TestImageReader(file_list, step, size): #训练数据读取接口
file_length = len(file_list) #获取图片列表总长度
line_idx = step % file_length #获取一张待读取图片的下标
test_line_content = file_list[line_idx] #获取一张测试图片路径与名称
test_image_name, _ = os.path.splitext(os.path.basename(test_line_content)) #获取该张测试图片名
test_image = cv2.imread(test_line_content, 1) #读取一张测试图片
test_image_resize_t = cv2.resize(test_image, (size, size)) #改变读取的测试图片的大小
test_image_resize = test_image_resize_t/127.5-1 #归一化测试图片
return test_image_name, test_image_resize #返回读取并处理的一张测试图片与它的名称
如果需要测试训练好的模型,在evaluate.py文件中设置三个参数即可。分别是第1个(x_test_data_path,指定X域测试输入图片的路径),第2个(y_test_data_path,指定Y域测试输入图片的路径)和第四个(snapshots,设置为训练的模型保存路径)。
下面,笔者就以训练的马和斑马相互转换为例,展示一下CycleGAN的实际效果:
首先是训练时的可视化输出图像,第一行从左往右三张依次是X域输入图像(马),生成的Y域图像(斑马),重建回的X域输入图像;第二行从左往右三张依次是Y域输入图像(斑马),生成的X域图像(马),重建回的Y域输入图像。
训练200次时的效果:

训练16500次的效果:

训练35000次的效果:

训练86200次的效果:

训练160800次的效果:

训练209300次的效果:

训练265500次的效果:

下面展示一下训练过程中的loss变化:
首先是判别器Dx的loss曲线:
然后是判别器Dy的loss曲线:
接着是判别loss曲线:

最后是CycleGAN总的目标函数loss曲线:
下面展示一些模型测试时斑马与马互相转换的效果:
每张图片中,左边的是输入图像,右边的是生成结果。
先展示一些成功的转换:
马->斑马






斑马->马

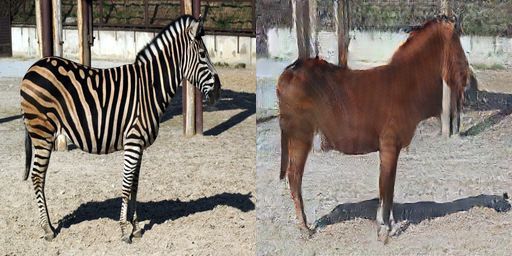




再展示一些失败的转换案例:
马->斑马

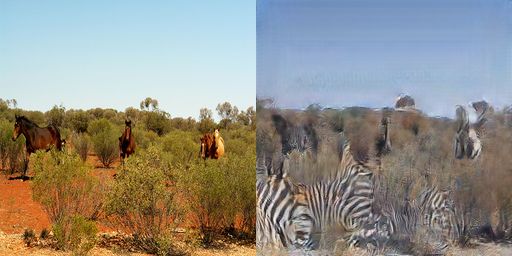


斑马->马




笔者还跑了一下苹果和橘子的互相转换,也展示一下效果:
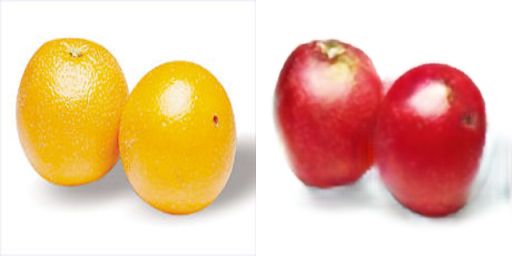
先展示一些成功的转换:
苹果->橘子





橘子->苹果





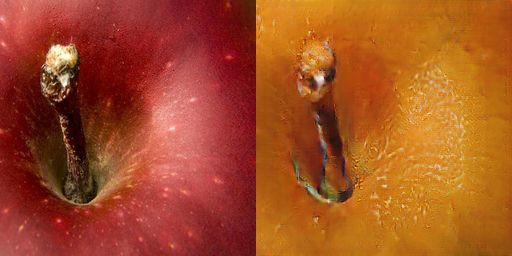
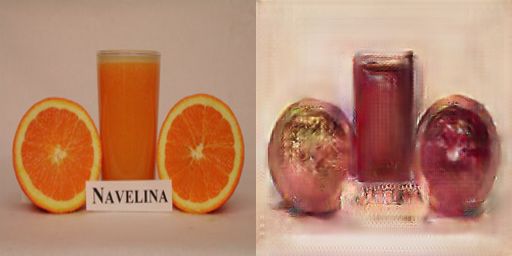
最后展示一些失败的转换案例:
苹果->橘子




橘子->苹果



上面详细地展示了CycleGAN在两个数据集上的结果。
很敬佩CycleGAN的作者,Berkeley AI Research laboratory的Jun-Yan Zhu,同时也感谢他为大家带来如此有意义的研究成果。笔者也衷心希望,此篇博客对大家的学习研究有帮助。
欢迎阅读笔者后续博客,各位读者朋友的支持与鼓励是我最大的动力!
written by jiong
岂不罹凝寒,松柏有本性