一种动态阈值白平衡算法实现
一种自动阈值白平衡算法实现
1.算法原理
白平衡是图像处理的一个极重要概念。所谓白平衡(英文名称为White Balance),就是对白色物体的还原。当我们用肉眼观看这大千世界时,在不同的光线下,对相同的颜色的感觉基本是相同的,比如在早晨旭日初升时,我们看一个白色的物体,感到它是白的;而我们在夜晚昏暗的灯光下,看到的白色物体,感到它仍然是白的。这是由于人类从出生以后的成长过程中,人的大脑已经对不同光线下的物体的彩色还原有了适应性。但是,作为拍摄设备,如数码相机,可没有人眼的适应性,在不同的光线下,由于CCD输出的不平衡性,造成数码相机彩色还原失真。一般情况下,我们习惯性地认为太阳光是白色的,已知直射日光的色温是5200K左右,白炽灯的色温是3000K左右。用传统相机的日光片拍摄时,白炽灯光由于色温太低,所以偏黄偏红。所以通常现场光线的色温低于相机设定的色温时,往往偏黄偏红,现场光线的色温高于相机设定时,就会偏蓝。
为了解决不同色温下,引起的白色漂移现象。由于白色对色温变化的响应最大,通常用白色来作为调整的基色。通常的白平衡技术有:自动白平衡、钨光白平衡、荧光白平衡、室内白平衡、手动调节。本文仅介绍其中的一种自动白平衡。
白平衡算法通常分为两步:白色点的检测,白色点的调整。本方法采用一个动态的阀值来检测白色点。详细算法过程为:
1. 把图像w*h从RGB空间转换到YCrCb空间。
2. 选择参考白色点:
a. 把图像分成宽高比为4:3个块(块数可选)。
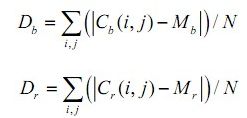
b. 对每个块,分别计算Cr,Cb的平均值Mr,Mb。
c. 对每个块,根据Mr,Mb,用下面公式分别计算Cr,Cb的方差Dr,Db。
d. 判定每个块的近白区域(near-white region)。
判别表达式为:
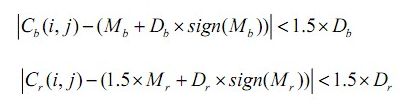
设一个“参考白色点”的亮度矩阵RL,大小为w*h。
若符合判别式,则作为“参考白色点”,并把该点(i,j)的亮度(Y分量)值赋给RL(i,j);
若不符合,则该点的RL(i,j)值为0。
3. 选取参考“参考白色点”中最大的10%的亮度(Y分量)值,并选取其中的最小值Lu_min.
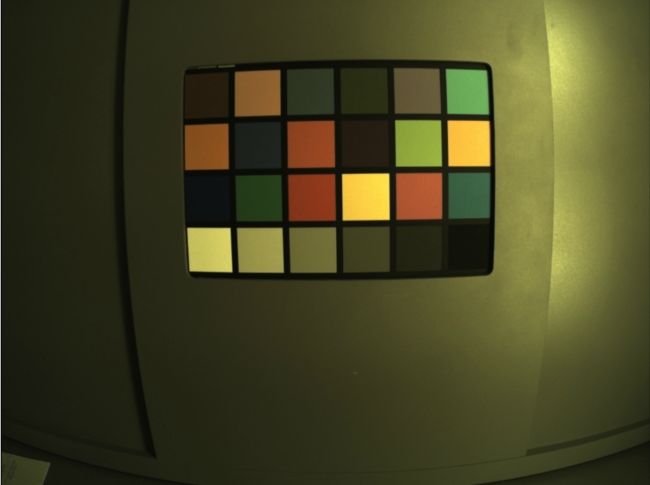
4. 调整RL,若RL(i,j) 5. 分别把R,G,B与RL相乘,得到R2,G2,B2。 分别计算R2,G2,B2的平均值,Rav,Gav,Bav; 6. 得到调整增益: Ymax=double(max(max(Y)))/5; 7. 调整原图像:Ro= R*Rgain; Go= G*Ggain; Bo= B*Bgain; A色温校正对比图 TL84色温校正对比图 D65色温校正对比图 参考文献: 1.http://www.cnblogs.com/haar/articles/1392227.html 2.基于灰度世界、完美反射、动态阈值等图像自动白平衡算法的原理、实现及效果 3.https://www.cnblogs.com/Imageshop/archive/2013/04/20/3032062.html
Rgain=Ymax/Rav;
Ggain=Ymax/Gav;
Bgain=Ymax/Bav;2.关键实现代码
int RGB2YCbCr(IMAGE_TYPE *bmp_img,T_U8*Y_img,double *Cb_img,double *Cr_img,DWORD width,DWORD height)
{
T_U32 lineByte,Source_linebyte,source_index,dst_index;
T_U16 i,j,Y;
T_U16 k = 0;
T_U8 *Source_img,R,G,B;
double Cr;
double Cb;
lineByte = (width * 8 / 8 + 3) / 4 * 4;
Source_img = bmp_img+54;
Source_linebyte = WIDTHBYTES(width*24);
for (i = 0; i < height;i++)
{
for (j = 0;j < width;j++)
{
source_index = Source_linebyte*i+3*j;
dst_index = lineByte*i+j;
R = Source_img[source_index+2];
G = Source_img[source_index+1];
B = Source_img[source_index];
Y = 0.299*R+0.587*G+0.114*B;
Cr = 0.5*R-0.419*G-0.081*B;
Cb = -0.169*R-0.331*G+0.5*B;
Y_img[dst_index] = (T_U8)Y;
Cr_img[dst_index] = Cr;
Cb_img[dst_index] = Cb;
}
}
return 0;
}
int AutoWhiteBalance_Optimi(IMAGE_TYPE *bmp_img,DWORD width,DWORD height)
{
T_U8*Y_img,*Ydata_img,*SignData,R,G,B,*bmp_data,*Dstbmp_img,*Dstbmp_data;
T_U16 height_step = height/3,witdth_step = width/4;
DWORD PixNum = height_step*witdth_step,i,j,m,n,Threshold =0,YLumi[256] = {0};
DWORD line_width,source_line_width,source_index,CbCr_indx,index,WhitePoint = 0,WhitePointCount = 0,WhitePoint10 = 0;
int arrindex=0,YMax = -999;
double Mr,Mb,Dr,Db,b1,b2,b,c,*Cb_img,*Cr_img,*Cbdata_img,*Crdata_img;
double MeanSumr,MeanSumb;
double absSumr,absSumb,Rave,Gave,Bave,RGain,GGain,BGain;
FILE *AutoWhiteBalance_fp = fopen("AutoBalance.bmp","wb");
if(NULL == AutoWhiteBalance_fp)
{
printf("Can't open AutoBalance.bmp\n");
return -1;
}
line_width = (width * 8 / 8 + 3) / 4 * 4; //8位深的BMP图像输入图像
source_line_width = ((width * 24 / 8 + 3) / 4 * 4 );
Cb_img = (double*)malloc(width*height*sizeof(double));
Cr_img = (double*)malloc(width*height*sizeof(double));
Y_img = (T_U8*)malloc(line_width*height);
Dstbmp_img = (T_U8*)malloc(source_line_width*height+BMPHEADSIZE);
SignData = (T_U8*)malloc(line_width*height);
memcpy(Dstbmp_img,bmp_img,source_line_width*height+BMPHEADSIZE);
RGB2YCbCr(bmp_img,Y_img,Cb_img,Cr_img,width,height);
Cbdata_img = Cb_img;
Crdata_img = Cr_img;
Ydata_img = Y_img;
WhitePoint = 0;
for (i= 0;i < height; i += height_step)
{
for (j = 0; j
3.图像效果