【论文阅读】Region Proposal by Guided Anchoring
论文地址:https://arxiv.org/abs/1901.03278v2
代码地址: mmdetection (https://github.com/open-mmlab/mmdetection)
论文看了,很好,有空再补笔记。 (已补,也不算原创吧,作者介绍的,我标记注释自己理解的。)
RPN(笔记:https://blog.csdn.net/m0_37644085/article/details/95005141)缺点/难点:
该方案有两个难点:
(1)对于不同的问题,必须预先定义一组固定高宽比的锚固,这种手工挑选的先验不现实地为物体设定了一套固定的形状(即比例和高宽比)。错误的设计可能会影响探测器的速度和精度。
(2)为了保持对提案的足够高的召回率,(单阶段、两阶段和多阶段)仍然依赖于滑动窗口的密集和均匀的锚框,即需要大量的锚,这些锚框是均匀分布的,许多锚被放置在不太可能存在感兴趣对象的区域,对应的是与感兴趣目标区域无关的负样本候选框。
同时,大量的锚固会导致大量的计算量,特别是当算法基线在proposals分类阶段,box分类阶段如faster rcnn有两个fc,会导致非常大的计算量。
这是作者写的介绍,我先记录下,有空再补吧:(已补)
https://zhuanlan.zhihu.com/p/55854246
前言
"Region Proposal by Guided Anchoring"。这篇 paper 的方法用在了 COCO Challenge 2018 检测任务的冠军方法中,在极高的 baseline 上涨了1个点。最近公开在 ArXiv 上,欢迎大家提出意见。

概述
我们提出了一种新的 anchor 生成方法 —— Guided Anchoring,即通过图像特征来指导 anchor 的生成。通过预测 anchor 的位置和形状,来生成稀疏而且形状任意的 anchor,并且设计了 Feature Adaption 模块来修正特征图使之与 anchor 形状更加匹配。在使用 ResNet-50-FPN 作为 backbone 的情况下,Guided Anchoring 将 RPN 的 recall(AR@1000) 提高了 9.1 个点,将其用于不同的物体检测器上,可以提高 mAP 1.2 到 2.7 个点不等。
下图是我们的方法和传统 RPN 的性能和速度对比,可以看到要显著优于传统 RPN。

下面是应用在不同检测方法上的结果,backbone 均为 ResNet-50-FPN。
背景
Anchor 是物体检测中的一个重要概念,通常是人为设计的一组框,作为分类(classification)和框回归(bounding box regression)的基准框。无论是单阶段(single-stage)检测器还是两阶段(two-stage)检测器,都广泛地使用了 anchor。例如,两阶段检测器的第一阶段通常采用 RPN 生成 proposal,是对 anchor 进行分类和回归的过程,即 anchor -> proposal -> detection bbox;大部分单阶段检测器是直接对 anchor 进行分类和回归,也就是 anchor -> detection bbox。
常见的生成 anchor 的方式是滑窗(sliding window),也就是首先定义 k 个特定尺度(scale)和长宽比(aspect ratio)的 anchor,然后在全图上以一定的步长滑动。这种方式在 Faster R-CNN,SSD,RetinaNet 等经典检测方法中被广泛使用。
Motivation
通过 sliding window 生成 anchor 的办法简单可行,但也不是完美的,不然就不会有要讲的这篇 paper 了。首先,anchor 的尺度和长宽比需要预先定义,这是一个对性能影响比较大的超参,而且对于不同数据集和方法需要单独调整。如果尺度和长宽比设置不合适,可能会导致 recall 不够高,或者 anchor 过多影响分类性能和速度。一方面,大部分的 anchor 都分布在背景区域,对 proposal 或者检测不会有任何正面作用;另一方面,预先定义好的 anchor 形状不一定能满足极端大小或者长宽比悬殊的物体。所以我们期待的是稀疏,形状根据位置可变的 anchor。

Formulation
首先我们思考 anchor 是如何生成的。我们通常使用 4 个数 (x, y, w, h) 来描述一个 anchor,即中心点坐标和宽高。我们将 anchor 的分布 formulate 成如下公式。
Anchor 的概率分布被分解为两个条件概率分布,也就是给定图像特征之后 anchor 中心点的概率分布,和给定图像特征和中心点之后的形状概率分布,这也是论文标题中 Guided Anchoring 的由来。Sliding window 可以看成是 是均匀分布而 是冲激函数的一个特例。
根据上面的公式,anchor 的生成过程可以分解为两个步骤,anchor 位置预测和形状预测。在这个看起来很简单的 formulation 上,我们走过一些弯路,讨论过一些奇奇怪怪的方法,最后发现大道至简。
方法
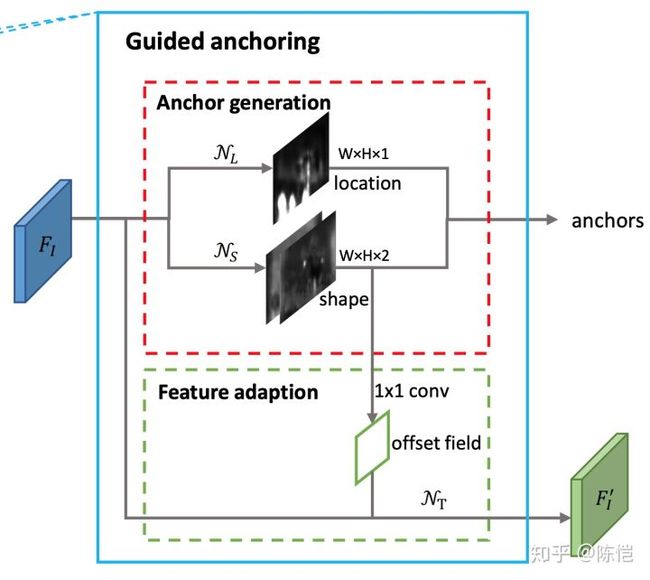
如图,在原始 RPN 的特征图基础上,采用两个分支分别预测 anchor 位置和形状,然后结合在一起得到 anchor。之后采用一个 Feature Adaption 模块进行 anchor 特征的调整,得到新的特征图供之后的预测(anchor 的分类和回归)使用。整个方法可以 end-to-end training,而且相比之前只是增加了 3 个 1x1 conv 和一个 3x3 deformable conv,带来的模型参数量的变化很小。
位置预测
位置预测分支的目标是预测哪些区域应该作为中心点来生成 anchor,是一个二分类问题。不同于 RPN 或者 segmentation 的分类,这里我们并不是预测每个点是前景还是背景,而是预测是不是物体的中心。
我们将整个 feature map 的区域分为物体中心区域,外围区域和忽略区域,大概思路就是将 ground truth 框的中心一小块对应在 feature map 上的区域标为物体中心区域,在训练的时候作为正样本,其余区域按照离中心的距离标为忽略或者负样本,具体设计在 paper 里讲得比较清楚。通过位置预测,我们可以筛选出一小部分区域作为 anchor 的候选中心点位置,使得 anchor 数量大大降低。在 inference 的时候,预测完位置之后,我们可以采用 masked conv 替代普通的 conv,只在有 anchor 的地方进行计算,可以进行加速。
形状预测
形状预测分支的目标是给定 anchor 中心点,预测最佳的长和宽,这是一个回归问题。按照往常做法,当然是先算出 target,也就是该中心点的 anchor 最优的 w 和 h,然后用 L1/L2/Smooth L1 这类 loss 来监督。然而这玩意的 target 并不好计算,而且实现起来也会比较困难,所以我们直接使用 IoU 作为监督,来学习 w 和 h。既然我们算不出来最优的 w 和 h,而计算 IoU 又是可导的操作,那就让网络自己去优化使得 IoU 最大吧。后来改用了 bounded IoU Loss,但原理是一样的。(也就是在针对每个检测出的中心点,设计一个最佳的anchor box。最佳anchor box的定义为:与预测的候选中心点的邻近ground truth box产生最大IOU的anchor box)。作者认为,直接预测anchor box的宽高的话,范围太广不易学习,故将宽高值使用指数及比例缩放(w=alpha*s*exp(dw))进行压缩,将搜索范围从[0,1000]压缩至[-1,1]。
这里面还有个问题,就是对于某个 anchor,应该优化和哪个 ground truth 的 IoU,也就是说应该把这个 anchor 分配给哪个 ground truth。(往下看也就会是围绕gt-box中心一小块,产生9个常见的anchor+gt = 10个anchor来计算IOU)。对于以前常规的 anchor,我们可以直接计算它和所有 ground truth 的 IoU,然后将它分配给 IoU 最大的那个 gt。但是很不幸现在的 anchor 的 w 和 h 是不确定的,是一个需要预测的变量。我们将这个 anchor 和某个 gt 的 IoU 表示为 。当然我们不可能真的把所有可能的 w 和 h 遍历一遍然后求 IoU 的最大值,所以采用了近似的方法,也就是 sample 一些可能的 w 和 h。理论上 sample 得越多,近似效果越好,但出于效率的考虑,我们 sample 了常见的 9 组 w 和 h。我们通过实验发现,最终结果对 sample 的组数这个超参并不敏感,也就是说不管 sample 多少组,近似效果已经足够。
你是把shape prediction分成两步来做,一步是通过sample9组W,H值,再计算IOU从而确定对应的GT,把这个gt的w和h作为shape label 即 w_t 和 h_t。第二步再通过bounded iou loss来优化W,H。
形状预测没有target的w和h,是直接将anchor和gt的iou作为优化目标,实际采用的是bounded iou loss的变种(只有w和h)。
生成 anchor
在得到 anchor 位置和中心点的预测之后,我们便可以生成 anchor 了,如下图所示。这时的 anchor 是稀疏而且每个位置不一样的。采用生成的 anchor 取代 sliding window,AR (Average Recall) 已经可以超过普通 RPN 4 个点了,代价仅仅是增加两个 1x1 conv。
Feature Adaption
故事本可以就此结束,我们用生成的 anchor 和之前的特征图来进行 anchor 的分类和回归,涨点美滋滋。但是我们发现一个不合理的地方,大家都是同一层 conv 的特征,凭啥我就可以比别人优秀一些,代表一个又长又大的 anchor,你就只能代表一个小小的 anchor。
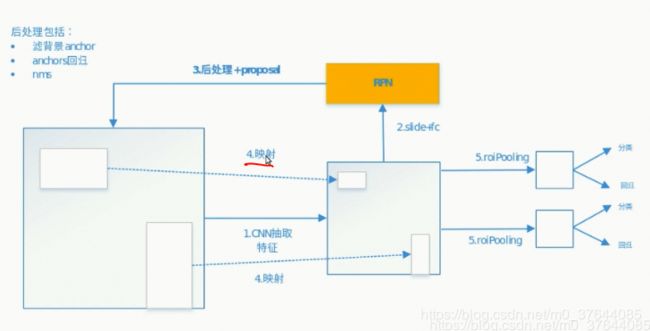
不合理的原因一方面在于,在同一层 conv 的不同位置,feature 的 receiptive field 是相同的,在原来的 RPN 里面,大家都表示相同形状的 anchor,所以相安无事,但是现在每个 anchor 都有自己独特的形状大小,和 feature 就不是特别好地 match。另一方面,对原本的特征图来说,它并不知道形状预测分支预测的 anchor 形状,但是接下来的分类和回归却是基于预测出的 anchor 来做的,可能会比较懵逼。(啥意思呢?就是说anchor中心点是在FM上做的,它预测的anchor的形状和位置是在原图上的,这两个是要对应起来的,预测到的anchor要根据stride映射到FM上的。原来呢。指定大小比例的anchor映射到FM上就是指定的点的区域,那现在预测的不同形状的anchor再映射过来,它在特征图上对应的点可能就不固定,可能偏移原来的中心区域了,也就是missalignment(中心对齐) 问题,那就不能很好地提取anchor/ RoI(中心) 对应的准确FM(中心)。因为有了anchor之后,随后的分类和回归是对feature map上的一个pixel来对应着一个anchor,应该是用anchor中心点所在地方的feature来表示。回归本身是没有问题的,但是在下一步的预测/分类中,应该是用anchor中心点所在地方的feature来表示。如果这个预测的anchor有偏移也就是该anchor不是这个FM点对应的真正anchor,相当于feature和anchor有missalignment,用这个feature来做预测,自然是会有误差。引用下作者的就是:,”feature f(x,y)代表anchor (x, y, w, h),来做接下来的预测“才是alignment的,而”feature f(x,y)代表anchor (x’, y‘, w, h),来做接下来的预测“会偏差。这个预测就是对anchor进行分类和回归得到proposal或者检测结果。看下faster rcnn的图)。在feature map上做anchor回归/分类,原来的RPN,feature map上的每个像素值都有默认的anchor(3x3),接着有2个3x3 conv来做分类和回归,都是基于默认的anchor上来做的,相当于一个很强的先验,而你现在每个像素值上的anchor都有可能在变,还是用一个3x3 conv去做, 但是却要解释不同大小anchor的预测偏移位置或者分类,比较无力?
我们增加了一个 Feature Adaption 模块来解决这种问题。思路很简单,就是把 anchor 的形状信息直接融入到特征图中,这样新得到的特征图就可以去适应每个位置 anchor 的形状。我们利用一个 3x3 的 deformable convolution 来修正原始的特征图,而 deformable convolution 的 offset 是通过 anchor 的 w 和 h 经过一个 1x1 conv 得到的。(此处应该划重点,Feature Adaption的关键在于用anchor shape来predict offset,把w,h转化为deformable conv的offset参数。如果是加一个普通的 3x3 conv,或者正常的 3x3 deformable conv来refine,提升都很有限,因为没有起到根据 anchor 形状来 adapt FM 的效果。只有显式地让bbox或者anchor的shape来指导feature refine才能让feature和anchor更好地match,从而有比较明显的提升)
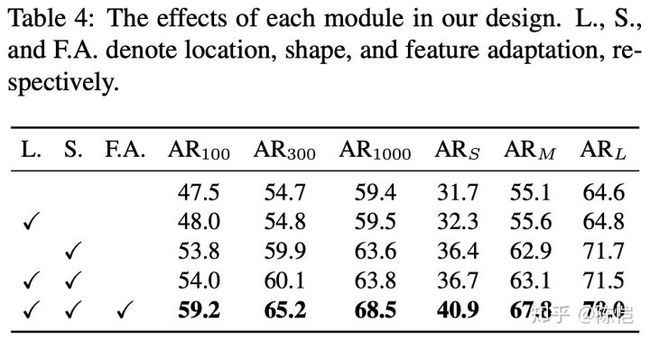
通过这样的操作,达到了让 feature 的有效范围和 anchor 形状更加接近的目的,同一个 conv 的不同位置也可以代表不同形状大小的 anchor 了。从表格可以看到,Feature Adaption 还是很给力的,带来了接近 5 个点的提升。
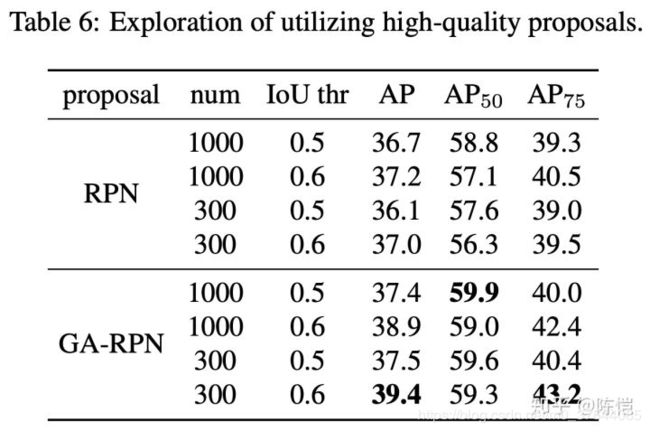
高质量 proposal 的正确打开方式
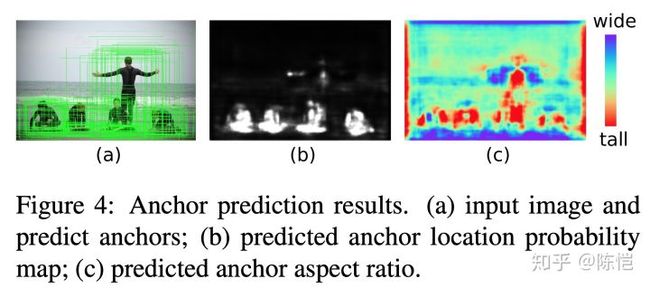
故事到这里其实也可以结束了,但是我们遇到了和之前一些改进 proposal 的 paper 里相同的问题,那就是 proposal 质量提升很多(如下图),但是在 detector 上性能提升比较有限。在不同的检测模型上,使用 Guided Anchoring 可以提升 1 个点左右。明明有很好的 proposal,但是 mAP 却没有涨很多,让人十分难受。

经过一番探究,我们发现了以下两点:1. 减少 proposal 数量,2. 增大训练时正样本的 IoU 阈值(这个更重要)。既然在 top300 里面已经有了很多高 IoU 的 proposal,那么何必用 1000 个框来训练和测试,既然 proposal 们都这么优秀,那么让 IoU 标准严格一些也未尝不可。
这个正确的打开方式基本是 Jiaqi 独立调出来的,让 performance 一下好看了很多。通过这两个改进,在 Faster R-CNN 上的涨点瞬间提升到了 2.7 个点(没有加任何 trick),其他方法上也有大幅提升。
谈谈 anchor 设计准则
我们在 paper 里提到了 anchor 设计的两个准则,alignment(中心对齐) 和 consistency(特征一致)。其中 alignment 是指 anchor 的中心点要和 feature 的位置对齐,consistency 是指 anchor 的特征要和形状匹配。
大概梳理一下,步骤一:生成anchor(guided anchoring先回归anchor的wh或者sliding window),步骤二:从anchor到proposal(分类和回归以及nms)。
- Alignment
由于每个 anchor 都是由 feature map 上的一个点表示,feature和anchor的中心点要对齐。那么这个 anchor 最好是以这个点为中心,否则位置偏了的话,这个点的 feature 和这个 anchor 就不是非常好地对应起来,用该 feature 来预测 anchor 的分类和回归会有问题。我们设计了类似 cascade/iterative RPN 的实验来证明这一点,对 anchor 进行两次回归,第一次回归采用常规做法,即中心点和长宽都进行回归,这样第一次回归之后,anchor 中心点和 feature map 每一个像素的中心就不再完全对齐。我们发现这样的两次 regress 提升十分有限(只要不是预定义好的anchor,都会给步骤二带来不确定量。回归wh和回归中心点其实都会在步骤一带来收益,同时给步骤二带来一些困难,feature adaption的目的就是对步骤二中的困难做一些弥补。差别在于,带来收益的多少,弥补的容易程度。作者就此衡量,决定只回归w,h另外我们目的就是不再需要预定义anchor的形状,所以对wh进行预测也是基于最初的idea。)。所以我们在形状预测分支只对 w 和 h 做预测,而不回归中心点位置。因为有了anchor之后,随后的分类和回归是feature map上的一个pixel来对应着一个anchor,如果anchor中心点偏移了,相当于feature和anchor有missalignment,用这个feature来做预测自然效果会差一些。
- Consistency
这条准则是我们设计 feature adaption 的初衷,由于每个位置 anchor 形状不同而破坏了特征的一致性(????anchor本来是FM通过strides对应中心点的中心区域,现在你预测的可能会偏移,再映射到FM上可能就不是这个特征点了),我们需要通过 feature adaption 来进行修正。这条准则本质上是对于如何准确提取 anchor 特征的讨论。对于两阶段检测器的第二阶段,我们可以通过 RoI Pooling 或者 RoI Align 来精确地提取 RoI 的特征。但是对于 RPN 或者单阶段检测器的 anchor 来说,由于数量巨大,我们不可能通过这种 heavy 的方法来实现特征和框的精确 match,还是只能用特征图上一个点,也就是 512x1x1 的向量来表示。那么 Feature Adaption 起到了一个让特征和 anchor 对应更加精确的作用,这种设计在其他地方也有可以借鉴之处。
总结
- 在 anchor 设计中,alignment 和 consistency 这两个准则十分重要。
- 采用两个 branch 分别预测 anchor 的位置和形状,不需要预先定义。
- 利用 anchor 形状来 adapt 特征图。
- 高质量 proposal 可以使用更少的数量和更高的 IoU 进行训练。
- 即插即用,无缝替换。
附上两个大神的讨论:
王康康回复陈恺 (作者)
我最初的问题是想要解释论文的alignment对齐效果就更好的原因。
所以问题的引发点是步骤二的时候无法适应“不可预知的量”。此时anchor中心和wh都是不可预知的量。经过实验,发现了wh可用feature adaption较好的弥补,而中心则不行。所以论文在步骤一里只回归了wh和不回归中心。而不回归中心这个操作,最终被总结为“对齐”。
或者说需要对齐的原因就是feature adaption无法解决anchor中心对于步骤二的不可预知。
假如我有个方法,比如更高级的fa,能够使步骤二适应不可预知的anchor中心,此时是不是就可以回归anchor中心了。你也认为回归anchor中心后anchor本身的recall变高,有了更高级的fa,回归anchor中心终将会带来正向收益
陈恺 (作者) 回复王康康5 个月前
嗯嗯大体上没有问题,但因为feature adaption本身是这篇paper提出的一个解决feature和anchor不match的方法,在没有fa的情况下,中心对齐确实是会让anchor的分类和回归变准的。如果有一个完美的fa比如直接用roi align(不考虑显存等可行性因素)的话,在第一步中回归中心点就可以让最后有更好的效果,不过这样的话就相当于直接用两类的faster rcnn作为rpn了。